

Лабораторные работы / 2и3
.doc
 БАЛАКОВСКИЙ
ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И
УПРАВЛЕНИЯ
БАЛАКОВСКИЙ
ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И
УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
ПРАКТИЧЕСКАЯ РАБОТА №2,3
по дисциплине
Локальные системы управления
Выполнил ст. гр. УИТ-51
Удалов Ю.В.
Принял
Ефремова Т.А.__________
«____» _____________2004г.
2004
Вариант 23

Передаточная функция непрерывной части системы (разомкнутой цепи) Wraz(s): Wraz=tf([0.008323],[0.01 0.4 1 0])
Transfer function:
0.008323
----------------------
0.01 s^3 + 0.4 s^2 + s
Передаточная функция замкнутой системы Wzam(s)
Wzam=Wraz/(1+Wraz)
Transfer function:
0.1224 s^3 + 4.896 s^2 + 12.24 s
--------------------------------------------------------
0.0001 s^6 + 0.008 s^5 + 0.18 s^4 + 0.8001 s^3
+ 1.003 s^2 + 0.008323 s
Перейдем от непрерывной модели объекта к дискретной с интервалом дискретизации 0.01 c, используя экстраполятор нулевого порядка, для этого воспользуемся в программе MATLAB функцией преобразования непрерывной модели системы в дискретную (с2d).
Ts=0.01;Wdis(z)=c2d(Wraz,Ts,'zoh') , получим передаточную функцию разомкнутой дискретной системы:
Ts=0.01;Wdis=zpk(c2d(Wraz,Ts,'zoh'))
Zero/pole/gain:
1.2582e-007 (z+3.387) (z+0.2418)
--------------------------------
(z-1) (z-0.9736) (z-0.6885)
Sampling time: 0.01
Для
проверки качества выполненной
аппроксимации сравним частотные
характеристики исходной непрерывной
и полученной дискретной моделей,
изображенные на рисунке. ЛАЧХ дискретной
модели строится в зависимости от
псевдочастоты λ, при этом сначала
п![]() роводится
ω-преобразование заменяя z=(1+ω)/(1-ω), а
затем осуществляется
переход от W(ω) к частотному выражению
передаточной функции через псевдочастоту
λ путем замены ω=0.5Tsλj.
роводится
ω-преобразование заменяя z=(1+ω)/(1-ω), а
затем осуществляется
переход от W(ω) к частотному выражению
передаточной функции через псевдочастоту
λ путем замены ω=0.5Tsλj.

Из рисунка следует, что аппроксимация выполнена верно.
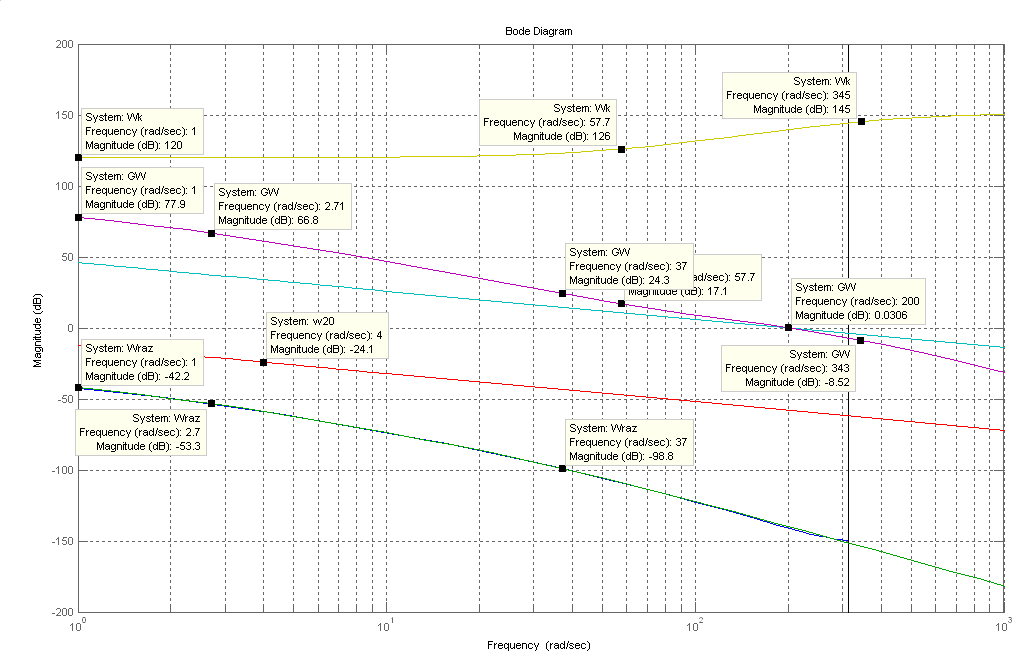
Построим АЧХ разомкнутой системы

Построим желаемую ЛАЧХ методом запретной зоны.
Зададим скорость обработки сигнала:
g1=25
g1 =
25
Ускорение:
g11=100
g11 =
100
Максимальная ошибка регулирования:
e=0.15
e =
0.1500
Построение ЖЛАЧХ начинаем с построения запретной зоны, геометрия которой определяется положением рабочей точки РТ.
частота
рабочей точки
![]() (hm)
(hm)
hm=g11/g1
hm = 4 рад/с
hml=Log10(hm)
амплитуда рабочей точки A
Amax=0.00787
Amax =
0.0079
A=Amax/e
A =
0.0525
Al=20*log10(A)
Al =
-25.6023 дБ
Т.о., РТ(4; -25.6) – координаты рабочей точки.
Через найденную точку проводим прямую под наклоном -20 дБ/дек - асимптоту рабочей точки. Область, ограниченная координатными осями и полученной прямой, является запретной зоной.
Зададим время регулирование tp=10 c и величину перерегулирования σ=30%,колебательности (М=1.3), тогда, согласно номограмме Солодовникова, Рмах составит 1.27, а частоту среза найдем из формулы:
![]()
![]()
Таким образом, ωср=1.1 рад/с.
Тогда![]() (hsr)
(hsr)
hsr=1/(0.01*0.5)
hsr =
200
hsrl=log10(hsr)
hsrl =
2.3010
Определим
графически краевую частоту, расположенную
правее
![]() - она является точкой пересечения
асимптоты рабочей точки и горизонтальной
прямой
- она является точкой пересечения
асимптоты рабочей точки и горизонтальной
прямой
M=1.4
M =
1.4000
hkr2=20*log10(M/(M+1))
hkr2 =
-4.6817
hkr1=20*log10(M/(M-1))
hkr1 =
10.8814
Правее
![]() ЖЛАЧХ идёт с наклоном параллельно
построенной ранее ЛАЧХ.
ЖЛАЧХ идёт с наклоном параллельно
построенной ранее ЛАЧХ.
0.52*1.04+20.22
ans =
20.7608

Построение запретной зоны
Таким образом, желаемая передаточная функция разомкнутой системы будет:
GW=zpk([-57.7 -57.7],[0 -2.679 -37.32 -344 -344],[30000000])
Zero/pole/gain:
30000000 (jh+57.7)^2
-------------------------------
jh (jh+2.679) (jh+37.32) (jh+344)^2
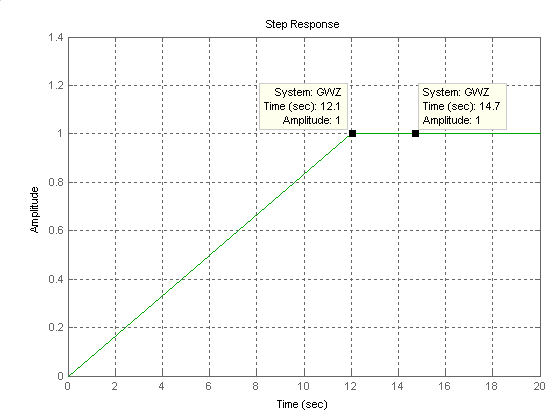
желаемая передаточная функция замкнутой системы
GWZ=GW/(1+GW)
Transfer function:
3e007 jh ^7 + 2.53e010 jh ^6 + 6.999e012 jh ^5 + 7.221e014 jh ^4 + 3.156e016 jh ^3
+ 5.206e017 jh ^2 + 1.182e018 jh
----------------------------------------------------------------------------------
jh ^10 + 1456 jh ^9 + 8.219e005 jh ^8 + 2.521e008 jh ^7 + 5.362e010 jh ^6 + 8.418e012 jh ^5
+ 7.486e014 jh ^4 + 3.167e016 jh ^3 + 5.207e017 jh ^2 + 1.182e018 jh
Переходный процесс в замкнутой системе

до после

1.4872
(z+1.198) (z+0.03958) (z^2 - 1.125z + 0.3163) ----------------------------------------------------- (z-1)
(z-0.9736) (z-0.6885) (z-0.03206)^2
1.2582e-007
(z+3.387) (z+0.2418)
--------------------------------
(z-1)
(z-0.9736) (z-0.6885)
Передаточную функцию последовательного корректирующего устройства определим по формуле:
Wk=GW/Wraz
Zero/pole/gain:
36044695.4223 (s+57.7)^2
----------------------------------
(s+344)^2
ЛАЧХ последовательного корректирующего устройства
Найдем передаточную функцию соответствующего параллельного корректирующего устройства:
Wpark=Wraz*(Wk-1)
Zero/pole/gain:
29999999.1677 (s+57.75) (s+57.65)
-----------------------------------------------
s (s+37.32) (s+344)^2 (s+2.679)
Найдем передаточную функцию соответствующего встречно-параллельного корректирующего устройства:
Wvpark=(1-Wk)/(Wraz*Wk)
Zero/pole/gain:
-1.2015 s (s+57.65) (s+37.32) (s+344)^2 (s+2.679)
-----------------------------------------------------------------
(s+344)^2 (s+57.7)
Для реализации выбираем последовательное корректирующее устройство, так как его наиболее просто реализовать
Wk=GW/Wraz
Zero/pole/gain:
36044695.4223 (0.0173*s+1)^2
----------------------------------
(0.0029*s+1)^2
При таком виде ЛАЧХ КУ по справочнику находим вид КУ. Получаем, что при таком виде ЛАЧХ корректирующего устройства, желаемую передаточную функцию корректирующего звена можно реализовать двумя одинаковыми дифференцирующими четырехполюсниками с разделительным усилителем изобразим его схему на рисунке.

Схема корректирующего устройства
Передаточная функция дифференцирующего четырехполюсника:
 ,
,
где T1=R1∙C1= 0.0173;
T2=KK1∙T1=0.0029.
KK1=R2/(R1+R2)=0.16;
При этом усилитель должен иметь коэффициент усиления:
![]()