

3.5. Расчет последовательного корректирующего звена методом лачх
Построение логарифмической амплитудно-частотной характеристики (ЛАЧХ) последовательного корректирующего звена проводится в такой последовательности.
Строится ЛАЧХ заданной (нескорректированной) системы.
Строится желаемая ЛАЧХ по заданным показателям качества переходного процесса.
Строится ЛАЧХ последовательного корректирующего звена путем графического вычитания ЛАЧХ заданной системы из желаемой ЛАЧХ.
По виду ЛАЧХ корректирующего звена синтезируются корректирующие звенья.
Построение ЛАЧХ заданной системы по виду передаточой функции. Передаточную функцию разомкнутой системы нужно представить в виде произведения передаточных функций типовых динамических звеньев (ограничимся случаем, когда в системе отсутствуют колебательные звенья и звенья с запаздыванием). Например, пусть передаточная функция разомкнутой системы имеет вид:
![]()
Построение. удобно проводить в такой последовательности.
1. Определить сопрягающие частоты ωi =l/Ti и отложить их по оси абсцисс в логарифмическом масштабе (Ti - постоянные времени передаточной функции W(Р)).
2.
Отложить точку А1
с координатами
![]() ,
20lgK
( см. рис. 4).
,
20lgK
( см. рис. 4).
Через точку А1 провести прямую с наклоном -20 дБ/дек. Построенная таким образом прямая линия совпадает с ЛАЧХ при частотах, меньших первой сопрягающей частоты (по порядку их расположения на оси частот слева направо).
3. На частоте сопряжения ωi характеристика меняет свой наклон либо на +20 дБ/дек, если постоянная времени Ti = l/ ωi находится в числителе исходной передаточной функции, либо на -20 дБ/дек, если постоянная времени Ti находится в знаменателе передаточной функции.
Построение желаемой ЛАЧХ. При построении желаемой ЛАЧХ выделяют три области: область низких частот, область средних частот и область высоких частот. Вид ЛАЧХ в каждой из областей по разному влияет на качество системы. В области низких частот вид ЛАЧХ определяет точность работы системы в установившихся режимах. Область средних частот определяет динамические свойства системы. Вид ЛАЧХ в области высоких частот практически мало влияет на качество системы.
Построение желаемой ЛАЧХ удобно начинать с области средних частот в такой последовательности.
По заданным величинам σmax и tp определяем с помощью табл. 3 частоту среза ωc.
Например, пусть задано, что σmax =30 % , tp=l,5 с. Из табл.1 для σmax =30% определяем tp ωc /π =3,2, откуда следует: ωc = 3,2 π /1,5=6,7 с-1 .
 -20дБ/дек
L()
-20дБ/дек
L()
Желаемая ЛАЧХ








 В ЛАЧХ КУ
В ЛАЧХ КУ








 -40дБ/дек А2
-40дБ/дек А2
+40дБ/дек
L3

 -20дБ/дек
М
-20дБ/дек
М
Запретная



Область
 д L3
L1
д L3
L1
-40 дБ/дек А1 -20дБ/дек
 2
3 c 4
5
6
2
3 c 4
5
6











 Lg
Lg

 В
1
А1=1рад/с
L2
В
1
А1=1рад/с
L2

 -40дБ/дек
-40дБ/дек
 -60дБ/дек
-60дБ/дек

 Исходная
Исходная
ЛАЧХ -80дБ/дек
Рис. 4. Логарифмическая амплитудная частотная
характеристика следящей системы.
-60дБ/дек
-80дБ/дек
Таблица 3
|
σmax,% |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
|
tp ωc/π |
5 |
4.4 |
4 |
3.6 |
3.2 |
3 |
2.8 |
|
L1 , дб |
18 |
15 |
13.5 |
12 |
11 |
10.5 |
10 |
|
, гр |
85 |
80 |
65 |
55 |
45 |
40 |
35 |
Наносим на ось абсцисс частоту среза с и проводим через нее прямую линию с наклоном -20 дБ/дек (рис.4).
Частота 2 , ограничивающая область средних частот желаемой ЛАЧХ слева определяется величиной отрезка L1 которая может быть найдена в зависимости от заданной величины σmax из табл.1. Частота ω5, ограничивающая область средних частот справа, определяется величиной отрезка L2, при этом
![]()
В области высоких частот желаемую ЛАЧХ нужно строить в виде прямолинейных отрезков с наклоном, кратным -20 дБ/дек. (т.е. -40, - 60, -80 и т.д.) , таким образом, чтобы разность характеристик желаемой и заданной в пределе при ω —» ∞ составляла прямую линию, параллельную оси частот.
В области низких частот желаемая ЛАЧХ строится следующим образом. По заданной величине коэффициента усиления системы Kc= ωomax/xmax определяем величину LA2 = 20LgKc и отмечаем на чертеже точку А2 с координатами ωа2 =1 с-1 и LA2 (см. рис.4). Через точку А2 проводим прямую линию с наклоном -20 дБ/дек.
От точки М, ограничивающей область средних частот слева, проводим прямую линию с наклоном -40дБ/дек до пересечения с низкочастотной частью желаемой ЛАЧХ.
Если в задании на разработку следящей системы указана максимально допустимая ошибка слежения Хmах при условии, что входной сигнал может изменяться с максимальной угловой скоростью ωomax и с максимальным угловым ускорением εomax , то для выполнения этих требований необходимо, чтобы желаемая ЛАЧХ не попадала бы в запретную область.
Запретная область строится следующим образом. Отмечаем на чертеже точку В с координатами:
От точки В вправо проводим прямую линию с наклоном -40 дБ/дек, а влево - прямую линию с наклоном -20 дБ/дек. Если ЛАЧХ, построенная по заданному коэффициенту Кс , попадает в запретную область, то это означает, что при данном коэффициенте Кс заданная точность слежения не может быть обеспечена и нужно его увеличить, т.е. поднять желаемую ЛАЧХ так, чтобы она не попадала в запретную область.
Для обеспечения заданных показателей качества переходного процесса скорректированная система должна обладать определенным запасом устойчивости по фазе. Необходимая величина запаса устойчивости по фазе для заданной величины максимального перерегулирования указана в табл.1.
Можно использовать другой формализованный метод построения желаемой ЛАХ [5]:
1. Характеристики нескорректированной системы и желаемая характеристики в возможно большом диапазоне должны совпадать друг с другом. В противном случае, реализация корректирующих устройств усложняется.
2. В низкочастотной области наклон характеристики должен составлять -20 дБ/дек, где - порядок астатизма системы.
3.
Низкочастотная асимптота при частоте
среза ω
=1
с-1
должна
иметь ординату
L=
20LgK
, где К
коэффициент усиления всей системы. При
этом К
находится из выражения:
![]() ,где
- ошибка регулирования.
,где
- ошибка регулирования.
4. Частота среза находится по приближенной формуле :
![]()
где tp- заданное время регулирования,
к – определяется из графика (рис 5) по величине перерегулирования
Сопрягающие частоты слева и справа от частоты среза должны располагаться на расстоянии 0,4 – 0,8 дБ от частоты среза. Желаемая ЛАХ должна пересекать ось абсцисс с наклоном -20 дБ/дек. После этого сопрягают среднечастотную часть ЛАХ с низкочастотной участком ЛАХ с наклоном – 20, 40, 60 дБ/дек.
Высокочастотная часть ЛАХ должна по форме повторять исходную ЛАХ.


к





5
 4
4
 3
Рис. 5.
График
для
3
Рис. 5.
График
для
определения частоты
 среза.
среза.
2
 1
1

%
%
0 10 20 30 40
Расчет последовательного корректирующего звена. ЛАЧХ последовательного непрерывного корректирующего звена строится путем графического вычитания из ЛАЧХ желаемой ЛАЧХ заданной части системы.
По ЛАЧХ корректирующего звена произведем его синтез (рис 6).
L() 0дБ/дек 6
1
L6








 0дБ/дек
-20дБ/дек +40дБ/дек
0дБ/дек
-20дБ/дек +40дБ/дек
Л




 АЧХ
КУ5
51
6
1
АЧХ
КУ5
51
6
1
L4 +20дБ/дек L5
2 3 0дБ/дек 4




 L3
L3
Lg()








1 1рад/с 2 3 4 5
а)





 Lg()
Lg()
1 рад/с
L4
б)




 Lg()
Lg()

 1
рад/с
1
рад/с
L5
в)




 Lg()
Lg()

 1
рад/с L6
1
рад/с L6
 г)
г)

 Lg()
Lg()


 1
рад/с
1
рад/с
L7 L4




 д)
д)

Рис. 6. Синтез корректирующего устройства.
Для этого возьмем звено, приведенное на рисунке 7, которое воспроизводит участок 1-2-3 ЛАХ (рис4) корректирующего устройства.
R2 R1
частотную передаточную функцию [5]
Uвх Uвых
С![]() ,
,
![]()
причем
![]() .
.
Рис.
7. Корректирующее устройство 1
Участок ЛАХ 3, 4, 51, 6 1 сформируем с мощью корректирующей цепочки приведенной, приведенной на рисунке 8.
R1 Корректирующее устройство имеет
С R2 Uвх Uвых частотную
передаточную функцию
частотную
передаточную функцию
Uвх![]() ,
,
![]() ,
,
причем
![]()
Рис. 8. Корректирующее устройство 2.
Участок
ЛАХ 51,
6
1 также
сформируем с с помощью цепочки,
приведенной на рис 6, но при этом
![]()
Суммарная ЛАЧХ, рассмотренных корректирующих устройства (рис 4д) отличается от необходимого нам ЛАЧХ КУ (рис 4а), тем, что он опущен вниз по оси ординат на величину L3+L7.
Для обеспечения соответствия обоих ЛАХ друг другу нужно увеличить общий коэффициент усиления системы на величину
![]() ,
,
т.е. произведение коэффициентов передачи фазового детектора, усилителя, электромашинного усилителя, двигателя, измерительного устройства и редуктора должно быть равно К.
Таким образом, скорректированная система будет иметь структурную схему, приведенную на рисунке 9.
 g(t)
e(t)
y(t)
g(t)
e(t)
y(t)
Wу(р)
Wэму(р) Wд(р)
Wку(р)
Wред(р)








Wдат(р)


Рис.9. Структурная схема скорректированной следящей системы
По структурной схеме, приведенной на рис. 3 найдем передаточную функцию разомкнутой системы. Для этого представим ее в виде
 U0
(t)
2
y(t)
U0
(t)
2
y(t)
Wред(р)
Wо(р)
Wоб(р)







Wдат(р)

Рис 10. Преобразованная структурная схема системы управления углом поворота вала обрабатывающего станка, где
![]() ;
;
После несложных преобразований получим:
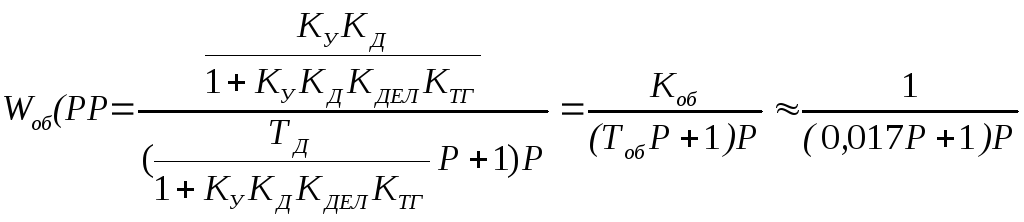 ,
,
но при этом будем иметь в виду, что параметры Коб и Тоб могут быть изменены изменением значений Ку и Кдел, чем воспользуемся при окончательной настройке системы.
Передаточная функция разомкнутой системы управления станком имеет вид:
![]()
По передаточной функции разомкнутой системы построим исходную ЛАХ. Для этого сначала определим сопрягающую частоту ω=l/0,017=58,8Гц и отложим ее на оси абсцисс в логарифмическом масштабе.
Отложим
точку с координатами
![]() ,
20lg0,015=- 36,5.
Дальнейшее построение ясно из рис.11.Из формулы
,
20lg0,015=- 36,5.
Дальнейшее построение ясно из рис.11.Из формулы
![]() найдем необходимый
коэффициент усиления системы
найдем необходимый
коэффициент усиления системы
По техническому заданию =0,01. ТогдаК=99. При этом20lgК=20lg99=39,9.
По формуле![]() длязаданного
значения перерегулирования - 15% и времени
регулирования 2 сек, с использованием
графика, приведенного на рис 5 определимс
длязаданного
значения перерегулирования - 15% и времени
регулирования 2 сек, с использованием
графика, приведенного на рис 5 определимс
Имеем
![]() Гц.
Примемс=4
Гц.
Гц.
Примемс=4
Гц.
Сопрягающие частоты слева и справа от с возьмем равными 0,4 декадам. Таким образом,2= 1,6Гц.

60

0дБ/дек







 В
А
В
А
40


L1
200 апретная
апретная
область
0 
 с=4
с=4
4=58,8 =0,009
-20
Желаемая ЛАХ
-36,5

Исходная ЛАХ
=10 =
0,1 =
1 -40 -60 ЛАХ
КУ 1=0,7 2=1,6 0дБ/дек 40дБ/дек































Р ис.
11. Логарифмические характеристикисистемы
ис.
11. Логарифмические характеристикисистемы
управления углом поворота вала обрабатывающего станка
Построение желаемой ЛАХ начнем с низкочастотной области. Для этого, через точку с координатами 1 и 39,9 проведем линию АК с наклоном 20дб/дек. Через частоту срезастакже проведем линию с наклоном20дб/дек. Через точку С (2= 1,6Гц) проведем линию с наклоном 60дб/дек до пересечения с линией АК. Абсцисса точки пересечения этих линий равна 0,7 Гц.
ЛАХ корректирующего устройства не входит в запретную область, координаты точки излома В которой, соответственно равны В= 0,009 Гц,LВ=47,2.
Для удобства реализации корректирующих устройств средне и высокочастотные части желаемой ЛАХ выберем аналогичными исходной ЛАХ.
Разность ординат
желаемой и исходной ЛАХ дают ЛАХ
корректирующего устройства. При этом,
корректирующее устройство
может быть реализовано путем
последовательного включения двух
звеньев, приведенных на рисунке 7. этого
возьмем звено, приведенное на рисунке
7, которое воспроизводит участок 1-2-3 ЛАХ
(рис4) корректирующего устройства.
R1
Параметры
частотной передаточной функции
![]() найдем из условий:
найдем из условий:
Т=R2C,
![]() ,
,
![]() ,
откуда получим:
,
откуда получим:
Т=0,63c; k=2,27,
Задаваясь С=2мк, получим R2=315 кОм, R1=250 кОм,
Передаточные функции корректирующих устройств будут иметь вид
![]() ,
,
Общий
коэффициент усиления системы будет
равен![]() 103,3=19952000.
103,3=19952000.
Схема электрическая системы управления углом поворота вала обрабатывающего станка приведена на рис. 12.

Рис. 12. Электрическая схема системы управления углом поворота
R1
М2
М1






R6
D1 D5

D2 D6
R7
R3 R5
























R2 R4 +U


A
C1 R8










R1 C2 TV












D3 D7
D4 D8