

Лекции / Лекции по дисциплине ЛСУ
.pdf
|
C |
Φ1 |
|
Φ2 |
f |
Д1 |
|
|
C2 |
|
|
|
|
|
C |
||
|
k |
|
k |
2 |
|
k |
||
|
|
1 |
|
|
|
P Tp 1 |
|
|
|
|
1 T1 p |
1 T2 p |
|
|
|||
|
C |
|
|
|
|
|
|
|
Входной величиной является значение ѐмкости, соответствующее экстремуму. |
||||||||
Оно связано соотношением Сэ |
1 |
, где L – индуктивность. |
|
|
||||
2 L |
|
|
||||||
|
|
|
|
|
|
|
|
|
Результирующая передаточная функция разомкнутой системы имеет вид: |
||||||||
Wраз P |
k |
|
|
|
|
|
|
|
P Tp 1 T1 p |
1 T2 p 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Исследование динамики исследуемой системы сводится к исследованию следящей системы. Поэтому здесь применимы все методы, используемые в непрерывных автоматических системах.
Помимо обычных показателей качества для экстремальных систем используется ещѐ одна характеристика – потери на поиск. В установившемся режиме регулируемая величина колеблется около значения, соответствующего экстремуму функции. В следствии этого, среднее значение отличается от экстремального. Среднее значение, обусловленное колебаниями поиска в установившемся режиме работы системы, называется потерями на поиск и представляется в виде степенного ряда:
F F |
|
1 |
|
d 2 F |
y 2 |
|
1 |
|
d 3 F |
y 3 |
....... |
(5) |
2 |
|
6 |
|
|||||||||
э |
|
|
dy 2 |
|
|
dy3 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
В степенном ряду частная производная соответствует точке экстремума, а у – это отклонение от этой точки. Если использовать квадратичную форму, то потери на поиск можно представить в виде:
|
|
|
|
|
|
|
1 |
|
|
|
d 2 F |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
y2 |
|
|||||||||||
|
F F |
|
||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
э |
2 |
|
|
|
|
dy2 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Здесь |
y 2 |
– средний квадрат отклонения регулируемой величины соответ- |
||||||||||||||||||
ствующего экстремума. |
|
|||||||||||||||||||
Если известна амплитуда поиска А1, то: |
|
|||||||||||||||||||
|
|
|
|
А1 |
|
|
|
|
|
|
|
|
|
|
||||||
|
y 2 |
|
|
|
|
|
|
|
|
|
||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
И в общем случае: |
|
|||||||||||||||||||
|
|
|
1 |
|
n d 2 F |
|
|
|
|
|||||||||||
|
|
|
|
|
y2 |
|
||||||||||||||
|
F F |
(1) |
||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
э |
|
|
2 i 1 dyi2 |
|
|
i |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рассмотрим исследование динамики экстремальной системы при F=F(y1, y2, …yn) для случая поиска экстремума по способу градиента.
Структурная схема исследования динамики экстремальной системы
41

|
|
|
|
|
|
|
|
F |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Регулируемая |
|
|
|
|
y1 |
|
||||||
|
|
|
W(p) |
|||||||||
|
|
|
|
|
|
|
|
|||||
система |
|
|
|
F |
||||||||
|
|
|
|
|||||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
W(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(p) |
|
|
||
|
|
|
|
y1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
1/p |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
y2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
1/p |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y3 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
1/p |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Эта схема имеет:
y1 W p dF i 1,2,...n dyi
или
y1 W p dF i 1,2,...n P dyi
W(p) – одинаковая для всех каналов.
Для малых отклонений для точки экстремума:
|
2 |
n |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
F F |
|
1 |
|
|
|
a |
y |
y |
|
|
|
||
|
|
|
|
k |
|
|
|||||||
э |
|
|
|
|
|
|
ik |
i |
|
|
|
||
|
|
|
i,k 1 |
|
|
|
|
|
|
|
|||
|
|
|
|
d 2 F |
|
|
d 2 F |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aik aki |
|
|
|
|
|
|
|
|
|
||||
|
|
|
dyi dyk |
э |
dyk dyi э |
||||||||
В n-мерном пространстве:
aik yi yk 1
i,k 1n
(2)
(3)
(4)
Т.е. область экстремума минимума является эллипсоидом.
|
n |
|
|
|
|||
Если aik y2 yk 1 |
(5) |
||||||
|
i,k 1 |
|
|
|
|||
(5) – эллипсоид экстремума максимума. |
|
||||||
yi |
|
W p |
|
1 |
|
(6) |
|
P |
Ci2 |
||||||
|
|
||||||
(6) – уравнение для малых отклонений. Сi – полуоси определяющего эллипсоида. "+" – минимум "-" – максимум
42
W p |
1 |
1 0 |
(7) |
|
P |
|
2 |
||
Ci |
|
|||
(7) – характеристическое уравнение для каждого из каналов.
Таким образом, исследование динамики сводится к анализу n-изолированных каналов, которым соответствуют характеристические уравнения (7).
Вопросы самоконтроля:
1.Способ производной по времени.
2.Способ запоминания экстремума.
3.Способ Гаусса-Зайделя.
4.Способ градиента.
5.Способ наискорейшего спуска.
ЛЕКЦИЯ №17
Цель лекции: Изучить принцип действия и математическое описание самонастраивающихся систем.
Задачи лекции:
1.Принцип действия самонастраивающихся систем.
2.Математическое описание самонастраивающихся систем.
Желаемый результат:
Студенты должны знать:
1.Принцип действия самонастраивающихся систем.
2.Математическое описание самонастраивающихся систем.
Учебный материал Самонастраивающиеся системы (с.с.)
С.с. регулирования должны обеспечивать необходимое качество процессов регулирования. При изменении свойств объекта регулирования и элементов регулятора, а также при изменении характеристик возмущающих сил.
Различают следующие системы:
1)с.с. с разомкнутыми цепями самонастройки
2)системы с замкнутыми цепями самонастройки
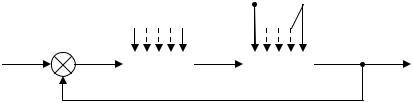
3)системы с экстремальной самонастройкой Рассмотрим 1)-й случай:
|
|
|
|
|
f1 fn |
||
g |
x |
|
|
|
|
|
y |
|
|
|
|
|
|||
|
W1 |
|
W2 |
||||
|
|
|
|
|
|||
W1 и W2 – передаточные функции частной системы W1 – передаточная функция объекта регулятора
W2 – передаточная функция корректирующего звена
Под влиянием внешних возмущений f1 и fn происходит изменение передаточной функции W2.
43

Для компенсации этих же возмущений их подводят к корректирующему устройству с целью изменения его передаточной функции.
Передаточная функция замкнутой системы:
Wзам |
|
W1 |
W2 |
(1) |
|
W1 W2 |
|||
1 |
|
|||
Для получения постоянства передаточной функции выражения (1) необходимо, чтобы W1W2=const, поэтому передатка ky должна изменяться по выражению
(2):
W1 |
|
W10 |
W20 |
(2), |
|
W2 |
|||||
|
|
|
|||
где W10, W20 – передаточные функции для некоторого начального состояния системы.
Выполнение условия (2) сопряжено со значительными трудностями вследствие того, что нельзя точно и полностью учесть все возможные воздействия на объект регулирования. Кроме того, точная реализация зависимости во многих случаях затруднительна вследствие технических трудностей. Поэтому на практике реализуется приближѐнное выполнение этого условия.
Рассмотрим систему автоматического построения вектора по двум составляющим:
Uy |
U2 |
|
φ |
Ux |
Д |
|
U1 |
|
АРХ |
|
|
|
|
|
|
> |
|
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На статорной обмотке СКВТ поступает напряжение переменного тока Ux, Uy, действующие значения которых пропорциональны проекциям вектора на оси x и y. В СКВТ образуется переменный магнитный поток, амплитуда которого пропорциональна модулю вектора.
max k 
 U x2 U y2 k1
U x2 U y2 k1 
 x2 y2 , а его ось составляет с осью обмотки, на которую
x2 y2 , а его ось составляет с осью обмотки, на которую
поступает напряжение Ux, угол arctg U y arctg y U x x
Следящая система поворачивает ротор СКВТ до тех пор, пока напряжение на сигнальной обмотке ротора, включенной на вход усилителя, не станет равным
44
нулю, точнее минимальным. Тогда ось сигнальной обмотки будет перпендикулярна оси потока статора.
Ось второй обмотки ротора будет совпадать с осью потока. Напряжение на 2-ой обмотке:
|
|
2 |
|
|
2 |
k1 |
|
|
|
U |
2 |
U 2 |
U 2 |
x2 y2 |
|||||
|
|||||||||
|
1 |
x |
y |
1 |
k |
||||
|
|
|
|
||||||
ω1, ω2 – число витков статорной и роторной обмоток.
Угол между осью квадратурной обмотки ротора и осью обмотки статора, на которую подаѐтся напряжение Ux, являющееся аргументом вектора, который строится.
При построении вектора следящая система работает в различных условиях, в зависимости от величины модуля строящегося вектора. Это объясняется тем, что крутизна чувствительного элемента, которым является сигнальная обмотка СКВТ, зависит от амплитуды магнитного потока, то есть от модуля вектора.
Эта крутизна может быть определена из выражения для напряжения сигнальной обмотки:
|
|
2 |
|
|
U2 |
|
U x2 U y2 sin U2 sin , |
||
|
|
1 |
|
|
здесь φ – расстояние между сигнальной обмоткой и осью, перпендикулярной потоку статора.
Для малых углов крутизна чувствительного элемента рассчитывается: kчэ U1 U 2 , [В/рад].
При малых модулях строящегося вектора напряжение мало, и мала крутизна чувствительного элемента. Поэтому построение будет производиться с большой ошибкой.
При больших модулях, вследствие увеличения крутизны чувствительного элемента, может быть нарушена устойчивость следящей системы. В связи с этим в схему построения вектора вводится специальное КУ, осуществляющее автоматическое регулирование коэффициента усиления одного из каскадов усиления (АРУ). Работа схемы АРУ происходит в функции строящегося вектора. Для этой цели может использоваться напряжение U2 квадратурной обмотки ротора СКВТ.
АРУ осуществляется, обычно, на каком – либо нелинейном элементе. КУ должно работать так, чтобы при увеличении U2, и, соответственно, при увеличении крутизны чувствительного элемента, коэффициент усиления усилителя уменьшался по гиперболической зависимости, тогда их произведение будет оставаться постоянным.
kчэ·ky=const,
что обеспечит работу следящей системы при постоянном коэффициенте усиления разомкнутой цепи.
Вопросы самоконтроля:
1.Принцип действия самонастраивающихся систем.
2.Математическое описание самонастраивающихся систем.
45
ГЛОССАРИЙ Автоматическим называется управление техническим процессом без участия человека.
Автоматическим регулятором называется регулирующее устройство, осуществляющее управление объектом регулирования согласно заданному алгоритму.
Алгоритм управления – это правило выработки управляющего воздействия для решения поставленной задачи.
Возмущающее воздействие (помехи) – это воздействие, нарушающее требуемую функциональную зависимость (связь) между задающим воздействием и регулируемой величиной.
Действительное значение регулируемой величины – это значение регулиру-
емой величины, соответствующее фактическому режиму работы объекта регулирования.
Датчик – функциональный элемент, измеряющий и преобразующий информацию о физической величине (показателю работы) в сигнал, удобный для обработки и использования в системе управления.
Задающее устройство – функциональный элемент, служащий для формирования сигнала, согласно заданному значению регулируемой величины.
Задающее воздействие – это величина, соответствующая заданному (предписанному) значению регулируемой величине.
Исполнительное устройство – функциональный элемент, осуществляющий выработку управляющих сигналов согласно, алгоритма управления и непосредственно воздействующих на объект управления для изменения режима его работы.
Корректирующее устройство – функциональный элемент, служащий для повышения устойчивости САУ и улучшения ее динамических характеристик. Локальная система управления (ЛСУ) – это система управления для решения одной функциональной задачи, для управления одним устройством, для регулирования или сигнализации одного параметра.
Ошибка регулирования – разность между предписанным и действительным значениями регулируемой величины.
Принципиальная схема показывает физическую природу элементов автоматики, технические характеристики, принцип действия и взаимодействие между ними.
Преобразующее устройство – функциональный элемент, принимаемый для преобразования управляющего сигнала с целью изменения закона управления.
Предписанное значение регулируемой величины – это значение регулируе-
мой величины, соответствующее требуемому режиму работы объекта регулирования.
Регулируемая величина – это показатель, характеризующий состояние объекта управления.
Система автоматического управления (САУ) – это взаимодействующий с объектом управления автоматический регулятор, в котором преобразование и
46
передача информации, формирование управляющих команд и их реализация осуществляется автоматически, согласно, заданного алгоритма управления. Сравнивающее устройство – это функциональный элемент, осуществляющий алгебраическую операцию по отношению к воздействиям, поступающим на его вход.
Статическая ошибка регулирования – это ошибка регулирования в устано-
вившемся режиме.
Усилитель – функциональный элемент, в котором, не изменяя физическую природу входного сигнала, осуществляется увеличение его мощности за счет энергии вспомогательного источника питания.
Управляющее воздействие – это воздействие, поступающее с исполнительного устройства на объект управления для управления регулируемой величиной. Функциональная схема состоит из функциональных элементов, которые показывают их функциональное назначение при автоматическом управлении технологическим процессом и связь между ними.
Функциональный элемент – это условно выделенная часть САУ, выполняющая определенную функцию по реализации заданного алгоритма управления. Элементом автоматики называется часть системы, в которой происходит качественное или количественное преобразование физической величины и передачи ее к последующему элементу.
Основная и дополнительная литература.
1.Теория автоматического управления : Учеб. для вузов / С.Е. Душин, Н.С. Зотов, Д.Х. Имаев и др.; Под ред. В.Б. Яковлев “ ”: М.: Высш. шк., 2005.
2.В. М. Терехов, О. И. Осипов, Системы управления электроприводов. Учебник для студентов высших учебных заведений. Изд-во «Академия»,
2005.
3.Справочная система программного пакета Matlab. The MathWorks, Inc., 2005.
4.Инлайн Груп - официальный дистрибьютор фирмы Xilinx, http://www.plis.ru/.
5.Fraba Posital Gmbh, http://www.posital.de.
6.Тахогенераторы Rollvam, http://www.may.ru/mechanic/mavilor/tachogen/.
7.Серводвигатели постоянного тока Mavilor, http://www.may.ru/mechanic/mavilor/.
8.ЗАО Рил - официальный представитель завода
ОАО "Электровыпрямитель" г. Саранск, http://ril.spb.ru/.
9.Теория систем автоматического управления // В.А. Бесекерский, Е.П. По-
пов. Изд. 4-е. СПб.: Изд-во "Профессия" , 2004. 752 с. 10.Москаленко В.В. Электрический привод. М.:Мастерство, 2000г.
11.Копылов И.П. Электрические машины: Учебник. – второе издание; переработанное. – М.: Высшая школа, 2000г.
12.Дорф Р., Бишоп Р. Современные системы управления. М.: Лаборатория базовых знаний, 2002г.
47
13.Филипс Ч., Харбор Р. Системы управления с обратной связью. М.: Лаборатория базовых знаний, 2002г.
14.Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э. Проектирование систем управления. М.: Бином, 2004г.
15.Олссон Г., Пьяни Дж. Цифровые системы автоматизированного управления.- СПб.: Наука, 2001г.
16.Мирошник И.В., Никифоров В.О., Фрадков А.Л. Нелинейное и адаптивное управление сложными динамическими системами. - СПб.: Наука, 2000г.
17.Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. М., Машиностроение, 2000г., 752 стр.
48