

4.5 Построение переходного процесса дискретной системы
Для построения переходного процесса воспользуемся программой Simulink, для этого смоделируем систему для получения переходного процесса (рисунок 4.5). Время дискретизации (Sample time) – 0,2 с. При этом был получен сходящийся переходный процесс, представленный на рисунке 4.6, это свидетельствует о том, что дискретная система устойчивая.
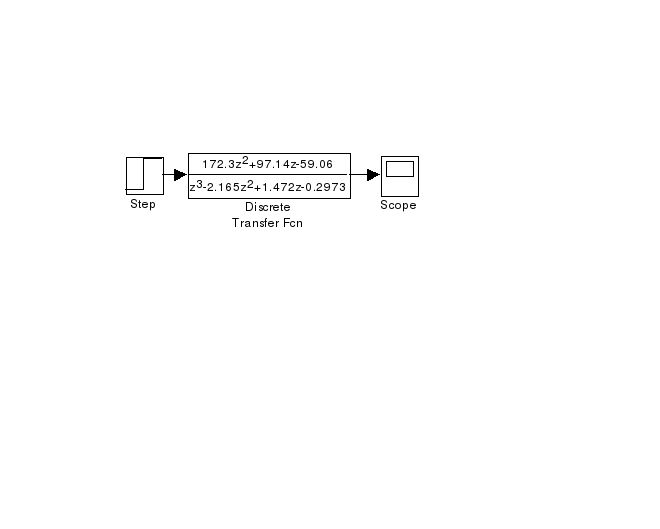
Рисунок 4.5 – Модель переходного процесса для дискретной системы автоматического контроля давления жидкости
t,
с h(t)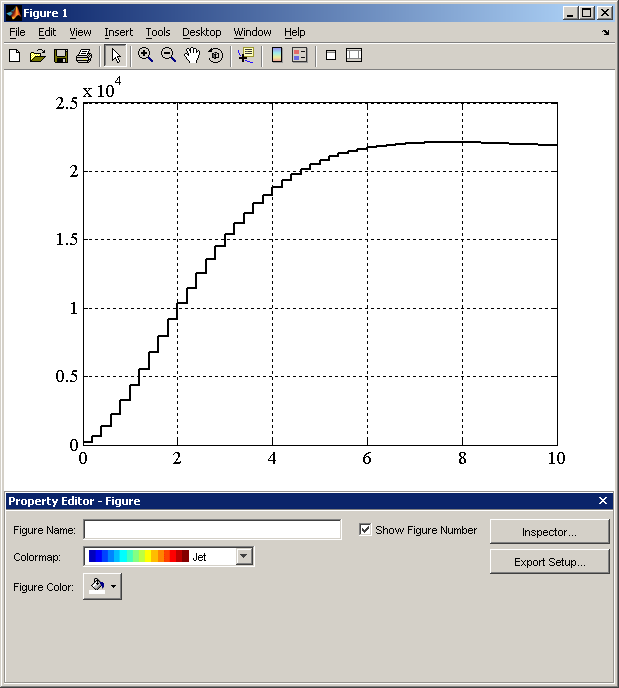


Рисунок 4.6 – Переходный процесс дискретной системы автоматического контроля давления жидкости
Вывод. По показателям качества аналоговой системы можно сказать, что система имеет низкое значение перерегулирования (5%), но время регулирования (5 с) больше заданного в техническом задании (1.8 с), система требует коррекции.
5 ПОСТРОЕНИЕ АМПЛИТУДНО-ЧАСТОТНОЙ И ФАЗО-ЧАСТОТНОЙ ХАРАКТЕРИСТИК И ИХ АНАЛИЗ
Построим логарифимческую амплитудо-частотную характеристику (ЛАЧХ) САУ автоматического контроля давления жидкости в трубопроводе дождевальной установки. Для этого разомкнем структурную схему по главной обратной связи (рисунок 4.2). Передаточная функция разомкнутой системы приведена в формуле 4.2. Проведем ее z-преобразование по формуле 4.9, используя программу MATLAB. Время дискретизации возьмем равным 0,2 с.
>> w=tf([0.552],[0.71 4.33 3.98 1]);
>> c2d(w,0.2)
Transfer function:
0.0007764 z^2 + 0.002329 z + 0.0004226
--------------------------------------
z^3 - 2.164 z^2 + 1.466 z - 0.2953
 (5.1)
(5.1)
Далее необходимо перейти к псевдочастоте, осуществив биполярные преобразования. Для этого производится замена
![]() (5.2)
(5.2)
А затем перейдем от ω-изображению к передаточной функции от псевдочастоты, сделав подстановку
![]() ,
(5.3)
,
(5.3)
где Т0=0.2 с - период дискретизации системы.
Такой период дискретизации был выбран с учетом приемлемой скорости опроса датчика микропроцессором.
Используя возможности программы MathCad, выполним вышеперечисленные преобразования.
×

×
После раскрытия скобок получаем передаточную функцию по псевдочастоте.
 (5.4)
(5.4)
Построим ЛАЧХ по полученной передаточной функции по псевдочастоте в программе MathLab.
>> w=tf([11.3 -183.8 2812 -3.52e4],[4.93e4 2.81e5 -2.56e5 -6.7e4])
Transfer function:
11.3 s^3 - 183.8 s^2 + 2812 s - 35200
-----------------------------------------
49300 s^3 + 281000 s^2 - 256000 s - 67000
>> margin(w), grid
Вывод. Из ЛАЧХ и ЛФЧХ (рисунок 5.1) можно судить, что в рассматриваемой системе контроля давления жидкости в трубопроводе дождевальной установки существуют запас по амплитуде (46.7дБ) и запас по фазе (127°). Это свидетельствует о том, что при переходе к псевдочастоте система осталась устойчива, а значит она будет работать даже при быстродействующем микропроцессоре.
Но поскольку регулирование системы слишком велико и система не успевает среагировать за нужный промежуток времени, необходимо провести частотную коррекцию.
ω,
рад/с А,
дБ φ,°





Рисунок 5.1 – ЛАЧХ и ЛФХЧ САУ контроля давления жидкости в трубопроводе