

6 Постороение желаемой логарифмической амплитудо-частотной характеристики системы, логарифмической амплитудо-частотной характеристики корректирующего устройства
Желаемой
называют асимптотическую ЛАЧХ разомкнутой
системы, имеющей желаемые (требуемые)
статические и динамические свойства.
Строится желаемая ЛАЧХ на основании
требований к системе. Низкочастотная
асимптота ЛАЧХ разомкнутой системы
определяет статические свойства. Если
передаточная функция разомкнутой
системы имеет передаточный коэффициент
![]() и порядок астатизма
и порядок астатизма
![]() ,
удовлетворяющий требованиям, то
низкочастотная асимптота желаемой ЛАЧХ
является низкочастотной асимптотой
неизменной части системы.
,
удовлетворяющий требованиям, то
низкочастотная асимптота желаемой ЛАЧХ
является низкочастотной асимптотой
неизменной части системы.
Среднечастотная
асимптота ЛАЧХ разомкнутой системы и
её сопряжение с низкочастотной определяют
динамические свойства системы –
устойчивость и показатели качества
переходной характеристики. Построение
среднечастотной асимптоты желаемой
ЛАЧХ начинают с выбора частоты среза
![]() .
Для этого используют номограмму В. В.
Солодовникова. Она определяет зависимость
перерегулирования
.
Для этого используют номограмму В. В.
Солодовникова. Она определяет зависимость
перерегулирования
![]() и времени регулирования
и времени регулирования
![]() от максимума
от максимума
![]() вещественной частотной характеристики
замкнутой системы, причем время
регулирования
вещественной частотной характеристики
замкнутой системы, причем время
регулирования
![]() дано в виде в виде функции частоты среза
дано в виде в виде функции частоты среза
![]() .
По заданному значению перерегулирования
.
По заданному значению перерегулирования
![]() определяют значение
определяют значение
![]() .
Затем по
.
Затем по
![]() определяют соотношения между
определяют соотношения между
![]() и
и
![]() .
.
Высокочастотная
асимптота желаемой ЛАЧХ мало влияет на
свойства системы. Поэтому ее выбирают
так, чтобы корректирующее устройство
было возможно более простое. Это
достигается при совмещении высокочастотных
асимптот характеристик
![]() и
и
![]() .
Если совмещение не удается, то
высокочастотная асимптота
.
Если совмещение не удается, то
высокочастотная асимптота
![]() должна иметь тот же наклон, что и
должна иметь тот же наклон, что и
высокочастотная
асимптота
![]() .
.
Так как система является дискретной, то необходимо определить запретную зону, для этого найдем рабочую точку
А
 ,
(6.1)
,
(6.1)
где
![]() — скорость изменения входного сигнала;
— скорость изменения входного сигнала;
![]() — ускорение
изменения входного сигнала;
— ускорение
изменения входного сигнала;
![]() — точность
прохождения сигнала.
— точность
прохождения сигнала.
Зададим значения, принимая, что за один опрос датчика (0,2 с) может произойти изменение значение входного сигнала на 5 мА. Ускорение измененя входного сигнала обычно для промышленных систем автоматики принимают как сотую часть от скорости изменения входного сигнала.
 ,
,
![]() А/с2,
А/с2,
![]() – допустимая
ошибка.
– допустимая
ошибка.
Значение частоты рабочей точки
![]() (с-1)
(6.2)
(с-1)
(6.2)
Расчет ординаты рабочей точки.

Таким образом, рабочая точка
![]() .
.
Через
полученную точку
![]() проводим прямую с наклоном минус
20
дБ/дек. Эта прямая является верхней
границей запретной зоны.
проводим прямую с наклоном минус
20
дБ/дек. Эта прямая является верхней
границей запретной зоны.
По
номограмме Солодовникова (рисунок 6.1)
по заданным в техническом задании
желаемому перерегулированию
![]() %
и времени регулирования
%
и времени регулирования
![]() c
определяем частоту среза и колебательность.
c
определяем частоту среза и колебательность.
![]()
Рисунок 6.1 – Номограмма Солодовникова
 ,
(6.3)
,
(6.3)
![]() (с-1)
(с-1)
М=1,28
Перейдем к псевдочастоте.
![]() ,
(6.4)
,
(6.4)
![]() ,
(6.5)
,
(6.5)
где Т0=0,2 с – период дискретизации
![]() (с-1)
(с-1)
По заданной колебательности М=1,28 найдем среднечастотную область построения ЖЛАЧХ. Границами для амплитуды этой области соответствуют значения:
Аср
max= дБ (6.6)
дБ (6.6)
Аср
min= дБ (6.7)
дБ (6.7)
Наклон ЖЛАЧХ в среднечастотной области должен быть -20 дБ/дек, через частоту среза в этой области проводим прямую с наклоном -20 дБ/дек. В высоко-частотной области ЖЛАЧХ сопрягается с исходной ЛАЧХ, то есть будет иметь такие же наклоны. Низкочастотная область не имеет большого значения, поэтому достраивается произвольно, в данном случае – с тем же наклоном, что и ЛАЧХ для упрощения корректирующего устройства.
П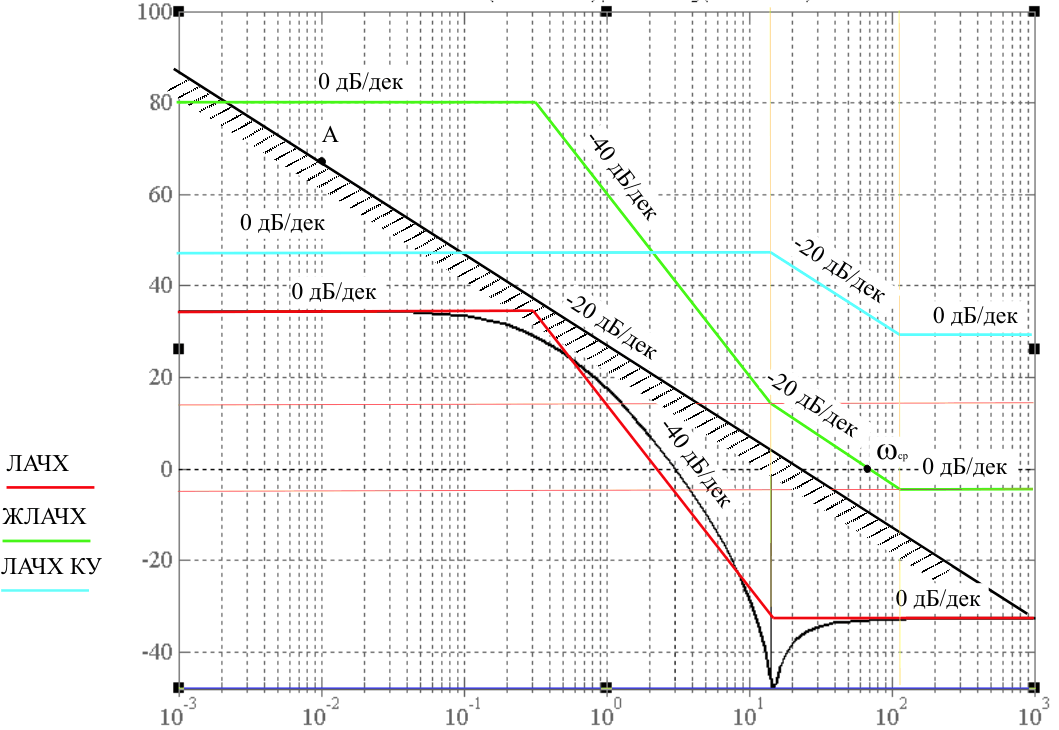 остроить
ЛАЧХ корректирующего устройства можно
с помощью графического вычитания
реальной ЛАЧХ из желаемой ЛАЧХ.
остроить
ЛАЧХ корректирующего устройства можно
с помощью графического вычитания
реальной ЛАЧХ из желаемой ЛАЧХ.

дБ![]() ,
,
![]() ,
с-1
,
с-1

Рисунок 6.2 — Реальная, аппроксимированная, желаемая ЛАЧХ и ЛАЧХ корректирующего устройства
7 РАСЧЕТ КОРРЕКТИРУЮЩЕГО СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДАВЛЕНИЯ ЖИДКОСТИ
7.1 Расчет аналогового корректирующего устройства
Для коррекции в системе применяется аналоговое корректирующее устройство (КУ) последовательного типа. КУ можно включать между различными элементами исходной системы. При выборе места включения руководствуются значением вносимой устройством погрешности. Наиболее предпочтительным вариантом является установка корректирующего устройства в электрическую цепь после микропроцессора.
По таблицам из атласа Топчеева, подберем корректирующее устройство по полученной ЛАЧХ (рисунок 6.3). /7/. Передаточная функция КУ:
 ,
(7.1)
,
(7.1)
![]() ,
(7.2)
,
(7.2)
 (7.3)
(7.3)

Рисунок 7.1 — Электрическая схема корректирующего устройства
Из графика ЛАЧХ КУ (рисунок 6.2) находятся значения постоянных времени, соответствующие им частоты определяются по местам излома ЛАЧХ.
 , (7.4)
, (7.4)
 (7.5)
(7.5)
Исходя из того, что на КУ не должно происходить значительного падения напряжения, чтобы принятые оптотиристором сигналы корректно регистрировались), выберем небольшое значение сопротивления.
![]() Ом
Ом
Исходя из формул 7.2 – 7.5, найдем значения емкостей:
 ,
,

Проведем анализ скорректированной системы.
Передаточная функция скорректированной системы по аппроксимированной ЖЛАЧХ (рисунок 6.2)
 (7.6)
(7.6)
Построим переходный процесс для скорректированной системы и оценим показатели качества системы. Переходный процесс представлен на рисунке 7.2.
2.5
2
1.5
1
0.5
0
hmax

hуст








h(t)
0
2 4 6 8 10 12 14 15 t,
с tр tн

Рисунок 7.2 – Переходный процесс скорректированной системы автоматического контроля давления жидкости
По графику переходного процесса, определим прямые оценки качества системы:
- установившееся состояние переходного процесса hуст=2,1·104;
- максимальное значение переходного процесса hmax=2,15·104;
- время первого согласования t1=1 c;
- время нарастания tн=1.8 c;
- время регулирования tр=1 c;
- перерегулирование 5%.
Вывод. Для улучшения параметров системы было рассчитано аналоговое последовательное корректирующее устройство. При включении корректирующего устройства в систему, были получены требуемые характеристики. В данном случае, было скорректировано время регулирования (с 5 с до 1 с), включение такого корректирующего устройства оправдано, поскольку оно имеет малую стоимость.