

2.6 Датчик давления
Необходимым условием выбора датчика – является унифицированный выходной сигнал для обработки его с помощью АЦП.
По искомым характеристикам можно выбрать датчик давления МТ100М. Эти датчики предназначены для непрерывного пропорционального преобразования давления жидкостей и газов в унифицированный токовый выходной сигнал. Все датчики Мт 100М термоконпенсированы по "0" и по всему диапазону измерения, а также в каждом датчике предусмотрена возможность регулировок "0" и диапазона.

Рисунок 2.4 – Внешний вид датчика давления
Основные технические характеристики датчик давления МТ100М. /6/
Давление разряжения, МПа 0,1.
Избыточное давление, МПа 0,1 ÷ 200.
Предел основной допускаемой погрешности, % ±0,5.
Диапазон температур, °С от минус 55 до плюс 80.
Степень защиты от воды и пыли IР65 по ГОСТ 1425.
Относительная влажность окружающего воздуха при 35°С, % не более 95.
Температура измеряемой среды, °С плюс 130.
Выходной сигнал, мА 0 ÷ 5.
Напряжение питания, В 15 ÷ 42.
Масса датчика, кг не более 0,2.
Длина датчика, мм 130.
Диаметр корпуса, мм 34.
Время реакции датчика, с 0,2
По устойчивости к механическим воздействиям датчики соответствуют исполнению VI по ГОСТ 12997-84.
Коэффициент передачи датчика – отношение максимальной выходной величины к входной,
![]() (2.18)
(2.18)
Передаточная функция датчика, как апериодического звена.
![]() (2.19)
(2.19)
2.7 Аналогово-цифровой и цифро-аналоговый преобразователи
В состав микропроцессора AMEGA32 входит АЦП и ЦАП, преобразующая универсальный токовый сигнал в цифровой и цифровой сигнал в напряжение необходимого уровня. Оба устройства включены последовательно с процессором, передаточная функция:
![]() (В/А)
(2.20)
(В/А)
(2.20)
3 РАСЧЕТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ ЛОКАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
Датчик представляет собой единую конструкцию состоящую из первичного мембранного тензопpеобpазователя давления (далее тензопpеобpазователя, рисунок 3.1, поз 1) и электронного блока (рис. 3.1, поз 2). Измеряемое давление воздействует непосредственно через мембрану на тензопpеобpазователь. Электрический сигнал тензопpеобpазователя передается в электронный блок, в котором он пpеобpазуется в унифицированный токовый выходной сигнал.

1 – тензопреобразователь; 2 − электронный блок; 3 − штуцер; 4 − разъем; 5 − корректор нуля "0"; 6 − корректор диапазона "∆"; 7 − задвижка; 8 − винт крепления разъема
Рисунок 3.1 – Устройство тензодатчика
Мембраны, представляющие собой заделанные по периметру эластичные пластины, находят широкое применение в качестве воспринимающих органов датчиков давления. В зависимости от величины измеряемого давления, типа выходного преобразователя и условия работы применяют различные материалы и формы мембран. С помощью мембраны возможно преобразование давления в усилие, которое затем передается на тензопреобразователь. Величина прогиба мембраны, обладающей определенной собственной жесткостью, определяется давлением.
Материал, применяемый для мембран, и его основные физические свойства приведены в таблице 3.1. /6/
Таблица 3.1 – Материал, применяемый в тензодатчике
-
Материал
Предел прочности,
кГ/мм2
Предел текучести,
кГ/мм2
Предел упругости,
кГ/мм2
Предел пропорциональности,
кГ/мм2
Модуль упругости,
кГ/мм2
Удельное сопротивление,
Ом·мм2/м
Бериллиевая бронза
125
114
77
75
5000
0,068
Связь между прогибом центра мембраны x и давлением p определяется соотношением:
 (3.1)
(3.1)
 , (3.2)
, (3.2)
 =0.18
, (3.3)
=0.18
, (3.3)
 , (3.4)
, (3.4)
 ,
,
 ,
,
![]() 3,39+0,227·В
3,39+0,227·В
где р — давление, кГ/см2;
R=2,5 см — радиус мембраны;
Е= 50 кГ/см2 — модуль упругости материала;
![]() =
0,82 мм — толщина мембраны;
=
0,82 мм — толщина мембраны;
A, B, c – коэффициенты мембраны;
х= 0,5 мм — перемещение центра мембраны;
![]() =
0,25 — коэффициёнт Пуассона;
=
0,25 — коэффициёнт Пуассона;
rж. ц= 1,5 см — радиус жесткого центра. /6/
Допускаемый прогиб толстой мембраны определяется выражением:
 (3.5)
(3.5)
 (мм),
(мм),
где
![]() - допускаемое напряжение на растяжение
для материала мембраны.
- допускаемое напряжение на растяжение
для материала мембраны.
Удачное решение датчика давления получается при использовании мембраны с наклеенными омическими тензодатчиками. Механические напряжения на поверхности мембраны, заделанной по контуру, меняются вдоль радиуса r по законам меняются:
- для радиальных напряжений,
 , (3.6)
, (3.6)
 , (3.7)
, (3.7)
 , (3.8)
, (3.8)
 (Па);
(Па);
- для тангенциальных напряжений,
 , (3.9)
, (3.9)
 (Па).
(Па).
Для получения максимальной чувствительности и минимальной температурной погрешности тензодатчики, включенные в соседних плечах моста, должны быть наклеены на мембрану в ее центральной части и на периферии, в областях, где напряжения имеют разные знаки, в таблице 3.2 приведены результат испытания датчика с толщиной 0,82 мм.
Таблица 3.2 – Данные датчика давления
-
Толщина мембраны σ, мм
Максимальное давление, кГ/см2
Чувствительность, мв/кГ /см2
0,82
200
0,582
Для повышения чувствительности иногда используют в одном датчике несколько мембран с наклеенными тензопреобразователями.
Для повышения быстродействия тонких плоских мембран, их иногда натягивают по контуру. Частота колебаний для этого случая определится по формуле:
 (Гц), (3.10)
(Гц), (3.10)
где Р=7 кГ/см – натяжение мембраны по периферии;
m=0,0025 кГ·сек2/см – масса мембраны. /6/
Вывод. В результате проведения расчета датчика были получены основные характеристики: напряжение в мембране, максимальное допустимое давление и частота колебаний мембраны.
4 РАСЧЕТ УСТОЙЧИВОСТИ СИСТЕМЫ
4.1 Передаточная функция системы
Обратимся к структурной схеме замкнутой и разомкнутой системы, показанной на рисунках 4.1 и 4.2 соответственно. На рисунке 4.1 разрывом показано то место, в котором размыкается система.
WАЦП




















Рисунок 4.1 – Структурная схема замкнутой системы автоматического контроля давления жидкости
WАЦП











Рисунок 4.2 – Структурная схема разомкнутой системы автоматического контроля давления жидкости
Расчет передаточной функции разомкнутой системы.
![]() ,
(4.1)
,
(4.1)
 (4.2)
(4.2)
Расчет передаточной функции замкнутой системы.

![]() (4.3)
(4.3)
4.2 Оценка устойчивости аналоговой системы
Оценку устойчивости проведем по критерию устойчивости Гурвица. Характеристическое уравнение системы:
![]() =0 (4.4)
=0 (4.4)
Выпишем коэффициенты характеристического уравнения: a0=0.46, a1=2.79, a3=2.56, a4=1. Первое необходимое условие для устойчивости системы - положительность всех коэффициентов – выполняется.
Расчет определителей Гурвица.
 (4.5)
(4.5)
 (4.6)
(4.6)
![]() (4.7)
(4.7)
Так как все определители Гурвица положительные, то выполняется и достаточное условие устойчивости системы. Система устойчива.
4.3 Расчет показателей качества системы
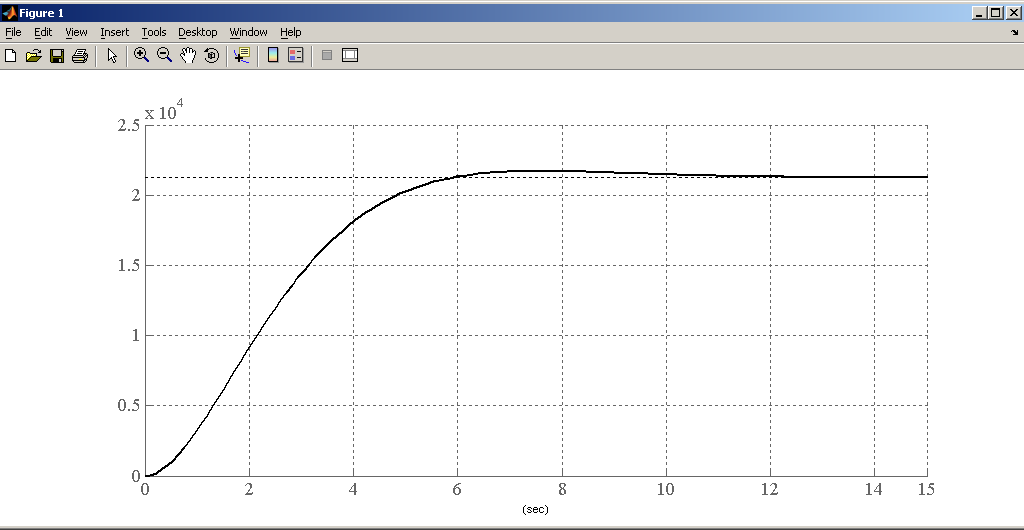
4.3.1 Прямые оценки качества системы. Для построения переходного процесса, воспользуемся программой Matlab. Введем передаточную функцию и выведем график командой step(w):
>> w=tf([4253 4253*5],[0.46 2.79 2.56 1])
Transfer function:
4253 s + 21265
--------------------------------
0.46 s^3 + 2.79 s^2 + 2.56 s + 1
>> step(w)
2.5
2
1.5
1
0.5
0
hmax
hуст









h(t)
0
2 4 6 8 10 12 14 15 tр tн t1
t ,
с
Рисунок 4.3 – Переходный процесс системы автоматического контроля давления жидкости
По графику переходного процесса (рисунок 4.3) находим прямые оценки качества:
- установившееся состояние переходного процесса hуст=2,1·104;
- максимальное значение переходного процесса hmax=2,15·104;
- время первого согласования t1=6 c;
- время нарастания tн=7,5 c;
- время регулирования tр=5 c.
Расчет перерегулирования.
 (4.8)
(4.8)
4.3.2 Косвенные оценки качества. График амплитудно-частотной характеристики (АЧХ) можно отобразить в Matlab с помощью команды bode(w), настроив графики так, чтобы шкала была не логарифмическая.
Определим по графику (рисунок 4.4) косвенные оценки качества системы:
- амплитуда при нулевой частоте A(0)=2.1·104;
- максимальная амплитуда Аmax=2.1·104;
- резонансная частота wp=0 Гц;
- полоса пропускания
(промежуток частот, при котором значения
амплитуды больше
 )
0<
)
0<![]() <0,5
Гц.
<0,5
Гц.
ω,
Гц
А(ω) Аmax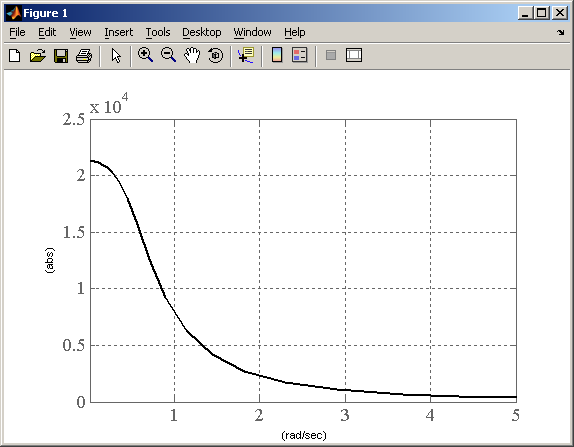












Рисунок 4.4 – АЧХ системы автоматического контроля давления жидкости
4.4 Оценка устойчивости дискретной системы
Поскольку в системе присутствует дискретный элемент (МП), необходимо провести z-преобразование передаточной функции системы и по z-изображению оценим устойчивость. Формула Z-преобразования:
 , (4.9)
, (4.9)
где
![]() и
и
![]() - показатели цифрового преобразования.
- показатели цифрового преобразования.
Z-преобразования можно также провести с помощью программы Matlab, задав время дискретизации, равного времени опроса датчика: T=0.2 с.
>> w=c2d(w,0.2)
Transfer function:
172.3 z^2 + 97.14 z - 59.06
----------------------------------
z^3 - 2.165 z^2 + 1.472 z - 0.2973
Sampling time: 0.2
![]() (4.10)
(4.10)
Для характеристического уравнения обозначим: a0=1; a1=-2.17; a2=1.47; a3=-0.3.
Для определения устойчивости импульсной системы по критерию Шур-Кона составим определители. Определители Шур-Кона составляются из коэффициентов характеристического уравнения.
Расчет определителей для характеристического уравнения третьего порядка.
 (4.11)
(4.11)
 ,
(4.12)
,
(4.12)
 ,
(4.13)
,
(4.13)
где а1, а2,…,аn - значения коэффициентов характеристического уравнения;
a1*,a2*,…,an* - сопряженные значения коэффициентов а1, а2,…,аn.
Согласно данному критерию, если значение определителя с нечетным индексом меньше нуля, а с четным больше нуля, то система является устойчивой. Данное условие выполняется, следовательно, система в дискретной форме является устойчивой.