


СОДЕРЖАНИЕ
1 РАСШИРЕННОЕ ТЕХНИЧЕСКОЕ ЗАДАНИЕ 5
2 ВЫБОР ЭЛЕМЕНТНОЙ БАЗЫ 6
3 ДАТЧИК ОБРАТНОЙ СВЯЗИ 16
4 ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ СИСТЕМЫ 21
5 ПОСТРОЕНИЕ ЖЛАЧХ 25
6 КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО 28
ЗАКЛЮЧЕНИЕ 34
ЛИТЕРАТУРА 35
9. http//:www.yandex.ru/matilda. 35
ПРИЛОЖЕНИЕ А 36
ВВЕДЕНИЕ
Бурное развитие электроники и вычислительной техники привело к внедрению автоматики буквально во все области деятельности человека, в том числе и в оборонной промышленности. Автоматика и автоматизация стали главным направлением развития военной техники.
Роль человека при этом сводится к организации работы автоматических систем средств вычислительной техники.
Локальные системы управления – это автоматические модули, используемые для решения одной функциональной задачи, для управления одним устройством, для регулирования или сигнализации одного параметра.
Целью данного курсового проекта является разработка локальной системы управления поворотом башни танка.
За время серийного производства внешний облик башен различных танков практически не изменился. Корпус состоял из литых (носовая часть, подбашенная коробка и корма) и катанных (днище, борта и фальшборта) броневых деталей, соединённых друг с другом гужонами. Башня танка - литая, цилиндрическая. Её поворот осуществлялся при помощи гидравлического привода или вручную. "Матильда" - первый танк, где был установлен гидропривод поворота фирмы "Фрейзер Нэш Компани", применявшийся для вращения стрелковых башен самолётов-бомбардировщиков.
Толщина башни - от 20 до 75 мм. Боевое отделение занимало среднюю часть танка. В башне устанавливались пушка и спаренный пулемет, приборы наблюдения и прицеливания, механизмы наводки и сиденья командира танка, наводчика и заряжающего. В корпусе в нишах, по стенкам и под поликом башни размещался боекомплект. На днище танка - гидропривод поворота башни.
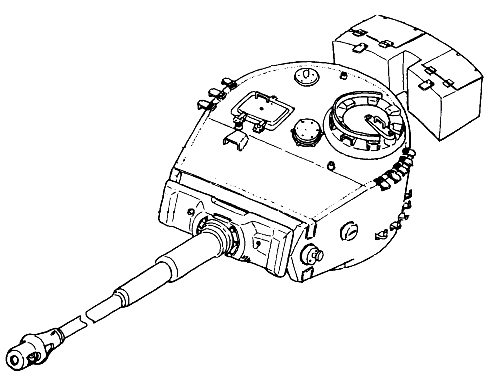
Рисунок 1 – Внешний вид башни.
Башня имеет подковообразную форму - сварная, с соединением листов в шип и вертикальными стенками, выполнявшимися из цельного гнутого листа. в передней части башни в литой маске устанавливались пушка, спаренный пулемет и прицел. при неработающем двигателе башню поворачивали вручную. башня, вследствие большого вылета пушки и тяжелой броневой маски, была неуравновешена, что делало невозможным ее поворот вручную при крене в 5°. На ее крыше устанавливалась командирская башенка с шестью, а затем с семью смотровыми приборами.
1 Расширенное техническое задание
Проектируемая локальная система управления предназначена для управления углом поворота башни танка.
Входным сигналом системы является электрический сигнал из системы управления, соответствующий заданному углу поворота, выходным сигналом является угол поворота башни.
Состав системы:
1.Микроконтроллерный комплект, куда входят устройство суммирования, АЦП, микроконтроллер, ЦАП.
2. Электрогидропреобразователь.
3. Объект управления (гидродвигатель c редуктором).
4. Датчик угла поворота.
Функциональная схема системы приведена на рисунке 2.
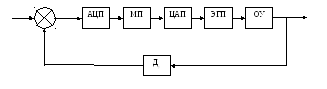
Рисунок 2 - Функциональная схема.
Технические характеристики системы.
- ошибка слежения: 0,02 рад;
- перерегулирование: 0%;
- время регулирования: 60c;
- максимально допустимая скорость: н = 0,8 рад/с;
- максимально допустимое ускорение: н = 0,55 рад/c2;
Система эксплуатируется в условиях повышенной влажности (до 100%), в широком диапазоне температур (-20C…+40C).
2 Выбор элементной базы
Рассчитаем требуемую мощность двигателя
![]() (1)
(1)
где Mн – требуемый вращающий момент в нагрузке, в данном случае необходим для преодоления сил трения в опорах вала, Mн=30 Нм; - КПД редуктора, =0,98; Iн – момент инерции установки, Iн = 500 Нм; н – допустимое ускорение нагрузки, н=0,3 рад/с2.
Получим требуемую мощность двигателя Pтр = 293Вт. Выбираем двигатель, для которого Pдв Pтр.
2.1 Гидродвигатель
В качестве регулирующего органа выбран гидродвигатель ДCГ-63. ТУ 2.053.1562-81. Двигатель предназначен для осуществления вращательных движений в механизмах промышленных роботов, станков, прессов и других машин с гидравлическим приводом. Диапазон вязкости минерального масла 17-213 мм2/с при температуре -10 +600С. Номинальный перепад давления 16 МПа. Частота вращения выходного вала – 600 об/мин. Номинальный крутящий момент 20 Нм. Расход масла 6,3 л/мин. Номинальный перепад давления 16 МПа. Момент инерции вала двигателя Iдв=0.12 Нм. Номинальная мощность 1000 Вт.
Оптимальное передаточное число редуктора:
![]() , (2)
, (2)
таким образом, оптимальное передаточное число редуктора равно 70.
Сделаем проверку по скорости вращения вала нагрузки:
![]() . (3)
. (3)
![]() . (4)
. (4)
Т.к. тр ном.дв , то необходимая скорость обеспечивается.
Сделаем проверку по моменту:
![]() (5)
(5)
Следовательно выбранный двигатель с редуктором обеспечивают требуемые параметры по скорости и моменту в нагрузке.
 (6)
(6)
где Кгд – коэффициент передачи,
 (7)
(7)
где
Кn
= 1,6106
– постоянная гидравлической помпы;
![]() =
860 – постоянная двигателя;K
= 0,4 – коэффициент жидкостного трения;
Kу
= 0,67 – коэффициент, характеризующий
утечки.
=
860 – постоянная двигателя;K
= 0,4 – коэффициент жидкостного трения;
Kу
= 0,67 – коэффициент, характеризующий
утечки.
Постоянная времени гидродвигателя
![]() (8)
(8)
где Сгд – коэффициент динамической жесткости гидродвигателя,
![]() (9)
(9)
где
Епр – приведенный модуль упругости
стенок гидродвигателя и жидкости,
![]() Lгд – приведенная длина хода лопасти
гидродвигателя.
Lгд – приведенная длина хода лопасти
гидродвигателя.
Относительный коэффициент демпфирования колебаний
![]() (10)
(10)
где f
– приведенный коэффициент вязкого
трения,
![]() .
.
Передаточная функция гидродвигателя может быть представлена:
 (11)
(11)
![]() (12)
(12)
Примем
![]() (13)
(13)
2.2 Выбор электрогидравлического преобразователя
Преобразователи с непосредственной связью электрических и гидравлических процессов (часто их называют электрофлюидными преобразователями) только начинают свой путь в технике.
Электрогидравлические преобразователи с использованием действия электростатического поля на неподвижный в исходном состоянии однофазный или двухфазный диэлектрик называют статическим электрогидравлическим преобразователем (ЭГП).
Данные электрофлюидные устройства предназначены для преобразования входного электрического сигнала в давление, возникающее в неподвижной, в исходном состоянии диэлектрической жидкости при приложении к ним электростатического поля напряженностью Е, и могут быть включены на расходную и безрасходную нагрузку. Область применения статических ЭГП являются цепи управления электрогидравлических систем автоматики.
Принцип действия статического электрогидравлического преобразователя основан на использовании механической (пондеромоторной) силы, возникающей в неподвижном в исходном состоянии, заряженном объеме жидкостного или газообразного диэлектрика при приложении к нему электрического поля. В результате под действием пондеромоторных сил диэлектрик приходит в движение и таким образом входной электрический сигнал (создающий одновременно и электрическое поле и заряд в объеме диэлектрика) непосредственно преобразуется в изменение давления или расхода жидкости. Таким образом статические ЭГП можно рассматривать как локальные микронасосы и микрокомпрессоры, работающие только при наличии входного электрического сигнала и не содержащие в своей структуре ни одной подвижной электромеханической и механической частью.
С учетом силы, действующей на свободные заряды, для объемных пондеромоторных сил в рабочих жидкостях статических преобразователей справедливо выражение:
![]() (14)
(14)
где
![]() (15)
(15)
- объёмная механическая сила, действующая на свободные заряды в диэлектрике;
![]() (16)
(16)
-
объёмная механическая сила , действующая
на поляризационные заряды в диэлектрике
при предположении, что
![]() - диэлектрическая проницаемость,
пропорциональна плотности
- диэлектрическая проницаемость,
пропорциональна плотности![]() ;
;
Принцип действия статического электрофлюидного (ЭФ) преобразователя с однофазным слабополярным жидким диэлектриком представленного на рисунке 3, заключается в создании в резко неоднородном электрическом поле потока униполярных ионов между электродами «игла – проницаемая плоскость».
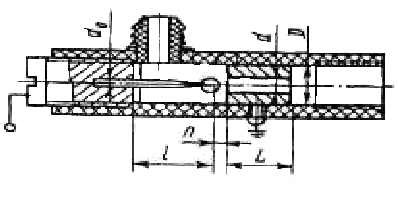
Рисунок 3 - Принципиальная схема статического электрогидравлического
ЭФ-преобразователя.
Данный
поток движется под действием механических
сил
![]() в электрическом поле к другому электроду,
передавая количество своего движения
окружающей диэлектрической жидкости
или воздуху, и создает в них давление,
вызывая в свою очередь движение жидкости
или газа. Конструкция преобразователей
предельно проста, что позволяет
реализовать их в микромодульном
исполнении.
в электрическом поле к другому электроду,
передавая количество своего движения
окружающей диэлектрической жидкости
или воздуху, и создает в них давление,
вызывая в свою очередь движение жидкости
или газа. Конструкция преобразователей
предельно проста, что позволяет
реализовать их в микромодульном
исполнении.
![]() (17)
(17)
где
![]() -
диаметр игольчатого электрода (
-
диаметр игольчатого электрода (![]() - радиус его закругления).
- радиус его закругления).
В
свою очередь,
![]() ,где
,где![]() - длина игольчатого электрода. При
приложении напряженияU
к электродам преобразователя, в
межэлектродном промежутке h
образуется затопленная ЭГД струя
заряженной жидкости, сосредоточенная
в основном по оси игольчатого электрода.
Скорость этой струи существенно превышает
скорости движения близлежащих слоев
жидкости, поэтому при конструировании
статических ЭФ ЭГП целесообразно
выбирать диаметр d
отверстия в плоском электроде из условия:
- длина игольчатого электрода. При
приложении напряженияU
к электродам преобразователя, в
межэлектродном промежутке h
образуется затопленная ЭГД струя
заряженной жидкости, сосредоточенная
в основном по оси игольчатого электрода.
Скорость этой струи существенно превышает
скорости движения близлежащих слоев
жидкости, поэтому при конструировании
статических ЭФ ЭГП целесообразно
выбирать диаметр d
отверстия в плоском электроде из условия:
![]() (18)
(18)
т.е. чтобы он ограничивал именно эту наиболее скоростную часть профиля скоростей течений. Последнее существенно увеличивает коэффициент передачи:
![]() ,
(19)
,
(19)
где
![]() - избыточное давление на выходе
преобразователя. Толщина плоского
электрода выбирается из соотношения:
- избыточное давление на выходе
преобразователя. Толщина плоского
электрода выбирается из соотношения:
![]() .
(20)
.
(20)
Статические характеристики таких ЭФ ЭГП характеризуются соотношением:
 ,
(21)
,
(21)
где
![]() -коэффициенты, зависящие от физико-химических
свойств среды;
-коэффициенты, зависящие от физико-химических
свойств среды;
![]() - напряжение на электродах
электрогидравлического преобразователя;
- напряжение на электродах
электрогидравлического преобразователя;
![]() -
начальное напряжение при котором
образуется униполярный поток ионов;
-
начальное напряжение при котором
образуется униполярный поток ионов;
![]() -
напряжение искрового пробоя межэлектродного
промежутка;
-
напряжение искрового пробоя межэлектродного
промежутка;
![]() -
радиус закругления игольчатого
электрода;
-
радиус закругления игольчатого
электрода;
h – расстояние между электродами.
![]() (22)
(22)
kd – коэффициент, зависящий от диаметра отверстия d электрода.
При
изменении в рабочих диапазонах
конструктивных параметров и напряжении
U,
работе ЭГП на безрасходную нагрузку
и использования в качестве рабочей
жидкости трансформаторного масла
коэффициенты
![]() и
и![]() соответственно равны
соответственно равны![]() ,
,![]() .
.
Если в качестве входной величины ЭФ ЭГП выбран электрический ток I в жидкости, то давление рВ на выходе ЭФ ЭГП прямо пропорционально току в межэлектродном промежутке:
![]() ,
(23)
,
(23)
где b – подвижность ионов, k2 - коэффициент пропорциональности.
Следовательно статическая характеристика преобразователя линейна. Динамические характеристики статических ЭГП оценивают по переходным характеристикам, на основании которых при линейной идентификации преобразователей можно найти и передаточные функции.
При линеаризации статических характеристик передаточная функция статического ЭГП с однофазным диэлектриком ЭФОП-1Ф имеет вид:
 (24)
(24)
где k - коэффициент передачи.
Для
трансформаторного масла при расстоянии
между электродами
![]() ,
,![]() имеем
имеем![]() ;
;![]() ;
;![]() ;
;![]() .
.
Получаем:
![]() .
(25)
.
(25)
Примем:
![]() .
(26)
.
(26)
2.3 Микропроцессорная система.
В качестве МПС выбран аналоговый микроконтроллер AD, обладающий следующими характеристиками: количество аналоговый входов - 4; количество аналоговых выходов - 1; разрядность АЦП-ЦАП-12; быстродействие: 12 МОПС.
Выбор датчика угла поворота
Для выбора датчика угла поворота проведем классификацию датчиков по принципу действия представленной на рисунке 4.
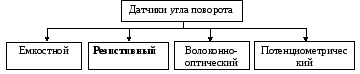
Рисунок 4 - Классификация датчика угла поворота по принципу действия.
Рассмотрим каждый датчик из классификации отдельно.
Емкостной датчик угла поворота. В качестве чувствительного элемента емкостного датчика угла поворота используется дифференциальный конденсатор. Его конструкция может быть достаточно произвольной. Емкость каждого из плеч может быть достаточно малой – единицы пикофарад, но необходимо, чтобы относительное изменение емкостей было как можно большим. Электронный преобразователь емкостного датчика собран по электронной схеме. В разрабатываемой системе емкостной датчик угла поворота использовать не желательно, так как он отличается сложностью электронной схемы.
Волоконно-оптический датчик угла поворота представляет собой систему, состоящую из источника узлучения, прямо передающего волоконно-оптического канала и фотоприемника. Здесь поток излучения от источника вводится в передающий световод и на его выходе формируется расходящийся поток излучения в виде конуса, ограниченного апертурой оптических волокон. При падении потока на поверхность объекта часть его отражается и попадет в приемный световод, проходит по нему в фотоприемник, где преобразуется в электрический сигнал. Питание волоконно-оптического датчика осуществляется от источника питания.
Потенциометрический датчик угла поворота. Потенциометры прецизионные непроволочные (на основе проводящих пластмасс) предназначены для использования в качестве датчиков угла поворота или перемещения в автоматических системах управления в различных отраслях техники: авиационной, ракетно-космической, корабельной, в различных промышленных системах и т.д. потенциометрические датчики выпускаются трех типов: односекционные, двухсекционные, трехсекционные.
Таблица 1 - Представители и технические характеристики
потенциометрических датчиков.
|
Тип |
Конструкция |
Функциональная характеристика |
Доп.отклонения функциональ-ной характеристики, % |
Номинальное сопртивление, Ом |
Угол поворота(град), рабочий ход(мм) |
Размеры,мм |
|
СП4-8-1 |
Односекцион-ный |
линейная |
+0,2;+0,5 |
1000 10000 +10; +20% |
340+2 |
30х21 |
|
СП4-8-2 |
Двухсекционный |
линейная |
+0,2;+0,5 |
30х28 | ||
|
СП4-8-3 |
Трехсекционный |
линейная |
+0,2;+0,5 |
20х35 |
Резистивный датчик угла поворота. Угловые датчики являются наиболее распространенными приборами широко используемые в машиностроении и на транспорте, строительстве и энергетике, в различных измерительных комплексах. Имеющиеся довольно высокие метрологические характеристики, при высокой эксплутационной надежности и низкой стоимости. В настоящее время серийный выпуск четырех типов угловых резистивных датчиков, имеющих одинаковые размеры и конструкцию и позволяющие охватить диапазоны измерения углов от 20 (ДУП-1А1) до 3600 (ДУП-1В4). Это датчики с абсолютным отсчетом. Датчики типа ДУП-1А имеют унифицированный выходной сигнал предназначенный для измерения поворота рабочих частей объекта. Он обеспечивает непрерывное преобразование измеряемого параметра в унифицированный выходной сигнал. Датчик снабжен магнитной присоской, что значительно упрощает его установку на объекте. Технические характеристики приборов приведены в таблице 2.
Таблица 2 - Технические характеристики резистивных датчиков угла поворота.
|
Тип прибора |
ДУП-1А1 |
ДУП-1А2 |
ДУП-1А3 |
ДУП-1А4 |
|
Диапазон измерения |
от +10 (00-20) до +100 (00-200) |
от +100 (00-200) до +300 (00-600) |
от +300 (00-600) до +900(00-1800) |
от +900 (00-1800) до +1800 (00-3600) |
|
Основная погрешность,+% |
0,5-1 |
0,5-1 |
0,5-1 |
1-1,5 |
|
Диапазон рабочих температур,0С |
-30…+60 |
-30…+60 |
-30…+60 |
-30…+60 |
|
Дополнительная температурная погрешность |
0,015%/0С |
0,015%/0С |
0,015%/0С |
0,015%/0С |
|
Дополнительная температурная погрешность шкалы |
0,08%/0С |
0,08%/0С |
0,08%/0С |
0,03%/0С |
|
Полоса пропускания (-3dB),Гц |
50 |
50 |
50 |
50 |
|
Напряжение питания, В |
+5…+15 |
+5…+15 |
+5…+15 |
+5…+15 |
|
Потребляемый ток, мА |
3 |
3 |
3 |
6 |
|
Выходной сигнал, А |
от 0…+2 до 0…+10 |
от 0…+2 до 0…+10 |
от 0…+2 до 0…+10 |
от 0…+2 до 0…+10 |
|
Габариты датчика,мм |
Ф46х30, встроенная электроника |
Ф46х30, встроенная электроника |
Ф46х30, встроенная электроника |
Ф46х20,отдельная плата электроника |
|
Вес,г |
62 |
62 |
62 |
58 |
|
Материал корпуса |
алюминий |
алюминий |
алюминий |
алюминий |
Из рассмотренных выше датчиков угла поворота был выбран резистивный датчик типа ДУП-1А4, так как он обладает наиболее подходящими для разрабатываемой системы техническими характеристиками.
Вид характеристики вход (угловое перемещение) – выход (электрический сигнал) датчика показан на рисунке 5.
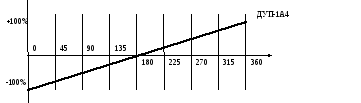
Рисунок 5 – Характеристика вход-выход резистивного датчика перемещения типа ДУП-1А4.
Выходной сигнал (выходной ток) линейно зависит от угла поворота. Следовательно передаточная функция датчика угла поворота будет иметь вид передаточной функции пропорционального звена:
![]() ,
(27)
,
(27)
где k - отношение максимального выходного сигнала к максимальному углу поворота.
![]() .
.
Получаем
![]() .
(28)
.
(28)