

6 Корректирующее устройство
6.1 Аналоговое КУ
С точки зрения требований к точности коррекция может потребоваться для увеличения порядка астатизма или коэффициента передачи системы при сохранении устойчивости и определенного качества переходного процесса.
Коррекция применяется также как средство обеспечения устойчивости, а так же повышения качества переходного процесса.
Осуществляется коррекция введением в систему корректирующих звеньев с особо подобранной передаточной функцией. Принципиально корректирующие звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им, также существуют и комбинированные способы включения. Соответственно, по способу включения в систему корректирующие звенья делятся на последовательные и параллельные.
Передаточная функция неизменяемой части имеет вид
![]() .
(58)
.
(58)
Передаточная функция желаемой системы имеет вид
![]() ,
(59)
,
(59)
тогда передаточная функция корректирующего устройства имеет вид
![]() .
(60)
.
(60)
Данную функцию возможно реализовать, используя усилитель и пассивный корректор, соответствующий передаточной функции
![]() ,
(61)
,
(61)
имеющей ЛАЧХ вида, показанного на рисунке 15.
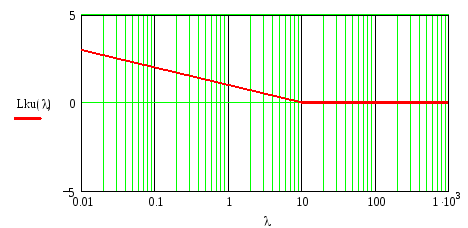
Рисунок 15 – ЛАЧХ КУ.
Передаточной функции (61) соответствует два соединенных последовательно звена
![]() ,
, ![]() . (62)
. (62)
Так как частоты спряжения функции Wку1 близки, то она не будет оказывать существенного влияния на работу корректора, поэтому ей можно пренебречь без ущерба для качества, таким образом передаточная функция выглядит в виде
![]() . (63)
. (63)
Для корректора, включенного в электрическую цепь, данный корректор соответствует схеме на рисунке 16.
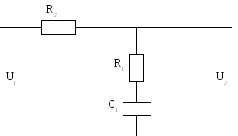
Рисунок 16 – Схема аналогового КУ.
Рассчитаем значения параметров элементов, для этого составим систему уравнений.
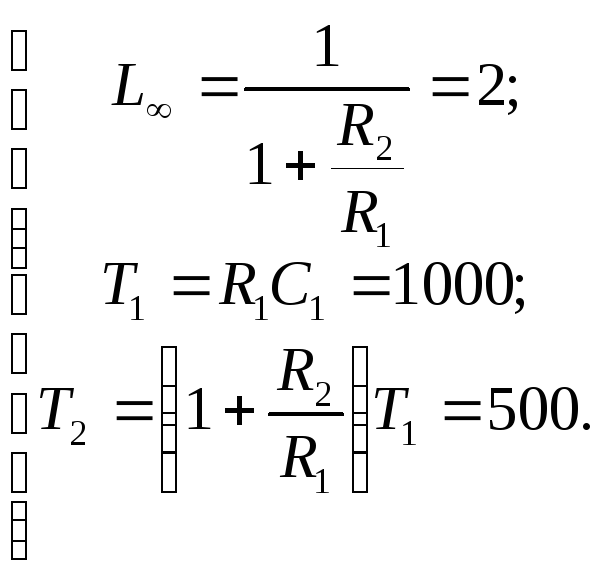 (64)
(64)
Решив совместно систему уравнений (70), получим значения параметров элементов:
R1 = 0,1 МОм, R2 = 5,1 МОм, С1 = 190 мкФ.
6.2 Программное корректирующее устройство
В разрабатываемой системе присутствует микропроцессор, с помощью которого можно реализовать коррекцию. В зависимости от способа включения микро-ЭВМ различают последовательную и параллельную коррекцию, в данном случае используется последовательная коррекция.
Последовательная коррекция с помощью управляющей программы служит для непосредственного преобразования сигнала рассогласования.
Для того чтобы реализовать программу коррекции необходимо представить передаточную функцию корректирующего устройства в виде разностных уравнений в реальном масштабе времени. Для этого необходимо произвести обратное z-преобразование.
Подставляя в выражение передаточной функции корректирующего устройства
![]() (65)
(65)
выражение
![]() (66)
(66)
получим
![]() . (67)
. (67)
Найдем разностное уравнение в реальном масштабе времени, то есть введя в числитель дополнительный сдвиг z-1. В результате этого получим
![]() ,
(68)
,
(68)
где x и y – соответственно входной и выходной сигнал, k – шаг квантования.
Блок схема для реализации функции программной коррекции представлена на рисунке 18.
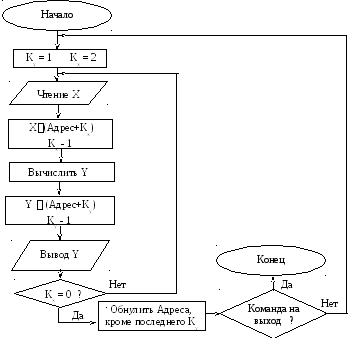
Рисунок 18 - Блок – схема корректирующей программы.
6.3 Выбор корректирующего устройства
Последовательные корректирующие звенья наиболее удобны в электрических САУ, особенно постоянного тока. В этом случае последовательные корректирующие звенья осуществляются в виде пассивных четырехполюсников, передаточные функции которых можно просто и плавно изменять в очень широких пределах, ограниченных лишь достаточно свободными условиями физической реализуемости. К достоинствам последовательной коррекции можно отнести:
- ускорение переходного процесса;
снижение установившейся ошибки;
простота включения элементов коррекции;
К недостаткам можно отнести:
увеличение чувствительности к помехам
необходимость согласования сопротивления корректирующих элементов с входным и выходным сопротивлением элементов системы, к которым они подключаются.
Мощным методом коррекции стало применение программных корректирующих устройств на микропроцессорах, применение которых позволяет варьировать параметры в широких пределах и быстро их изменять без изменения технического исполнения системы. Еще одним достоинством данного способа является точное выполнение зависимостей корректирующего устройства, тогда как для аналоговых корректирующих устройств трудно добиться точности, так как трудно точно подобрать номинал элементов в соответствии с расчетным. Предпочтения отдаются программным средствам коррекции.
Поскольку в системе уже есть встроенный МП, то применение аналогового корректирующего устройства экономически нецелесообразно, поэтому выбираем программную коррекцию.