

Курсовые работы / беговой дорожкой в спортивном комплексе космической станции / 7 Сонтез коррект устр
.doc6 СИНТЕЗ КОРРЕКТИРУЮЩИХ ЗВЕНЬЕВ
6.1 Синтез последовательного корректирующего звена
Для обеспечения необходимой точности регулирования частоты вращения ленты транспортера беговой дорожки в разомкнутую цепь необходимо последовательно включить корректирующее устройство. То есть необходимо произвести синтез последовательного корректирующего устройства.
Передаточная функция последовательного корректирующего устройства находится по выражению:
![]() (54)
(54)
Следовательно, получаем передаточную функцию параллельного корректирующего звена в виде:
![]()
![]()
ЛАЧХ корректирующего устройства приведена на рисунке 11.
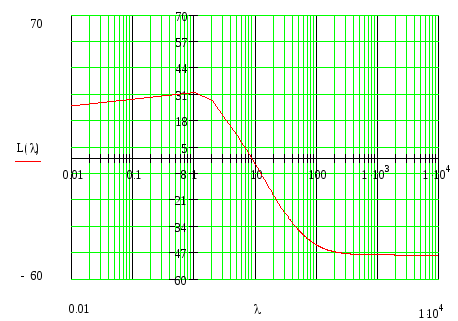
Рисунок 11 – ЛАЧХ параллельного корректирующего устройства
При таком виде ЛАЧХ КУ по справочнику находим вид КУ [10]. Получаем, что данное последовательное корректирующее устройство можно реализовать на RC- цепочке вида:
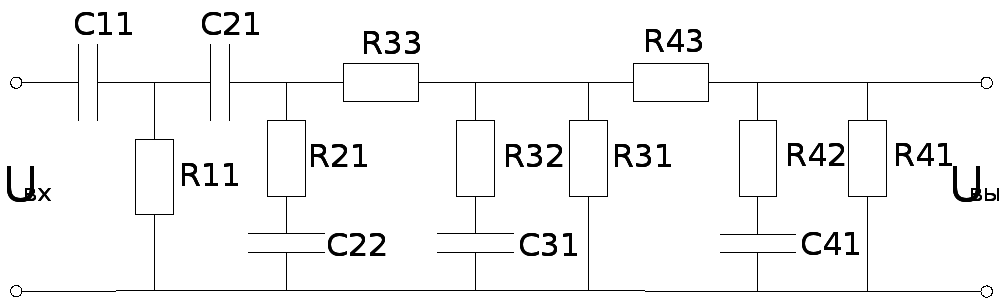
Рисунок 12 – Схема последовательного корректирующего устройства
Передаточная функция первой RC-цепочки:
![]() , (57)
, (57)
где ![]() ;
(58)
;
(58)
Задаемся значением С1=10 мкФ, тогда
![]() .
.
Передаточная функция примет вид:
![]()
Передаточная функция второй RC-цепочки:
![]() , (61)
, (61)
где ![]() (62)
(62)
 (63)
(63)
![]() (64)
(64)
Аналогично, пусть С21=10 мкФ, тогда
![]() →
→
![]() →
→
![]()
![]() →
→
![]() →
→
![]()
Приравняем выражения () и (), получим:
![]() →
→
![]() →
→
![]()
![]() →
→
![]()
![]()
Передаточная функция примет вид:
![]()
Передаточная функция третей RC-цепочки:
![]() ,
,
где ![]() (62)
(62)
Принимаем С31=10 мкФ.
![]() →
→
![]() →
→
![]()
![]() →
→
![]() →
→
![]() →
→
![]()
Передаточная функция примет вид:
![]()
Передаточная функция четвертой RC-цепочки:
![]() ,
,
где ![]() (62)
(62)

![]()
Зададимся С41=10 мкФ.
![]() →
→
![]()
![]() →
→
![]()
Передаточная функция примет вид:
![]()
При этом усилитель должен иметь коэффициент усиления:
![]() (65)
(65)
Передаточная функция корректирующего звена:
![]()
![]()
В результате включения последовательного корректирующего устойства структурная схема системы регулирования беговой дорожки примет вид рисунка .

Рисунок – Последовательного включения корректирующего
устройства
6.2 Синтез программного корректирующего устройства
Для того чтобы синтезировать программное корректирующее устройство запишем передаточную функцию параллельного корректирующего устройства (56) в виде z – разностных уравнений, проведя обратное z – преобразование.
Введем замену
![]() ,
получим
,
получим
![]() (66)
(66)
Введем следующую замену
![]() ,
получим функцию вида
,
получим функцию вида
![]() (67)
(67)
Домножим числитель и знаменатель на 1/z2, тогда:
![]() (68)
(68)
Преобразуем (68) к виду (69)
![]() (69)
(69)
Запишем разностное уравнение в реальном масштабе времени введя в числитель дополнительный сдвиг z-1:
![]() (70)
(70)
-
Выбор корректирующего устройства
Параллельные корректирующие устройства получили широкое распространение в САУ, за счет того, что они позволяют корректировать точность работы системы. И за счет того, что:
Во-первых, обратную связь, как правило, легче реализовать из-за того, что на ее вход поступает более мощный сигнал, чем уровень мощности в той точке системы, куда подключен выход цепи обратной связи.
Во-вторых, зачастую не надо корректировать всю систему в целом, а достаточно скорректировать влияние какого-то конкретного звена, что существенно упрощает реализацию корректирующего устройства.
Третье преимущество относится к цепям с коррекцией по отрицательной обратной связи – они уменьшают отрицательное влияние нелинейностей в системе, а также нестабильность ее параметров.
К основным достоинствам этого вида коррекции относят:
-
Уменьшение динамических показателей переходного процесса или исключение влияния звеньев системы ухудшающих переходный процесс;
-
Снижение чувствительности системы к флуктуациям и помехам;
-
Высокая эффективность коррекции;
-
Применение в системах любой сложности.
Наряду с достоинствами параллельная коррекция имеет ряд недостатков, таких как возможность перегрузки цепи, охваченной корректирующим контуром, более сложная схема включения и необходимость применять согласующих элементов.
Но так как в САУ изначально присутствует микропроцессорное устройство, то применение аналогового корректирующего устройства экономически нецелесообразнее, так как добавляются новые элементы. Одним из достоинств программной коррекции является точное выполнение зависимостей корректирующего устройства, тогда как для аналоговых корректирующих устройств трудно добиться точности, так как трудно точно подобрать номинал элементов в соответствии с расчетным. Поэтому целесообразнее написать программу коррекции для МП.
7 ПРОГРАММА ДЛЯ МИКРОПРОЦЕССОРА
Представим разностное уравнение (70) в виде:
![]() (71)
(71)
Для разностного уравнения (71) корректирующего устройства составим блок-схему возможной процедуры коррекции (рисунке 14).















Рисунок 14 – Блок-схема программы коррекции
Ниже приведена процедура коррекции для микропроцессора, написанная на языке Assembler.
;Расчет разностного уравнения
;![]()
;х – входной сигнал
;у – выходной сигнал
i_port EQU 11h; номер порта для чтения
o_port EQU 12h; номер порта для записи
А1 EQU 0.095;
A2 EQU -0.166;
A3 EQU 0.072;
B1 EQU -1.19;
B2 EQU 0.269;
x1, x2, x3, DB 0; выделение памяти под переменные xk-1, xk-2, xk-3
у1, у2 DB 0; выделение памяти под переменные yk-1, yk-2
;вычисляем значение выражения (k)=A1*x1+A2*x2+A3*x3+B1*y1+B2*y2
start: ;метка начала цикла коррекции
in al,i_port ;чтение данных из порта
mov al,Al; вычисление слогаемого А1*х1
mov bl,al; сохранение результата в bl
; в результате имеем А1*х1 в регистре bl
mov al,х2; вычисление
mul al,A2; слагаемое А2*х2
add bl,al; прибавление к предыдущему результату
; в результате имеем А1*х1+А2*х2 в регистре bl
mov al,х3; вычисление
mul al,A3; слагаемое А3*х3
add bl,al; прибавление к предыдущему результату
;в результате имеем А1*х1+А2*х2+А3*х3 в регистре bl
mov al,y1; вычисление
mul al,B1; слагаемое В1*у1
add b1,a1; прибавление к предыдущему результату
mov a1,y2; вычисление
mul al, B2; слагаемое В2*у2
add bl, a1; прибавление к предыдущему результату
; в регистре b1 имеем результат вычисления всего выражения
mov y3,y2; для следующего
mov y2,y1; такта
mov y1,b1
mov x2,x1
mov x1,x
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы