


1 Техническое задание на разработку системы
Данная система автоматического управления предназначена для управления поворотом устройства перемещения робота.
Н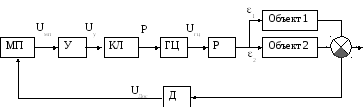 иже
приведена функциональная схема
разрабатываемой САУ (рис. 1).
иже
приведена функциональная схема
разрабатываемой САУ (рис. 1).
МП – микропроцессор; У – усилитель; ЭМКЛ – электромагнитный клапан; ГЦ – гидроцилиндр; Р – редуктор; Д – датчик угла поворота
Рисунок 1 – Функциональная схема САУ
Микропроцессор является контролирующим органом системы. В его функции входит формирование управляющего сигнала Uмп вычисляемого по значению давления в гидроцилиндре, поступающего на вход микропроцессора с датчика давления.
Усилительное устройство предназначено для усиления мощности сигнала, поступающего с микропроцессора. Амплитуда Uу достаточна для реализации электромагнитным клапаном возложенных на него функций. Применяют электронные и электромагнитные усилители, гидравлические золотники, пневматические усилители.
Электромагнитный клапан в закрытом состоянии перекрывает переходное отверстие к гидроцилиндру из независимой цепи питания, находящейся вне устройства. При поступлении на вход клапана командного сигнала Uу с усилителя (управляющий сигнал формируется микропроцессором) заслонка клапана открывается, перемещаясь на расстояние L, и из независимой цепи питания поступает избыточное давление Р, компенсирующее возникшее рассогласование.
Гидроцилиндр служит рабочим органом системы. Основной функцией гидроцилиндра является создание необходимого усилия на формуемой заготовке, для этой цели к нему подводится внешняя цепь питания. Датчик давления необходим для преобразования значения давления P в гидроцилиндре в пропорциональный ему электрический сигнал Uгц являющийся информационным сигналом системы.
Датчик угла поворота необходим для преобразования значения угла поворота колеса в пропорциональный ему электрический сигнал UДос являющийся информационным сигналом системы.
Параметры регулируемой системы:
-
Объем гидроцилиндра V = 0,25 м3.
-
Рабочая площадь поршня S = 0,25 м2.
-
Рабочее давление в системе P = 5 кГс/см2.
-
Перерегулирование = 30 % .
-
Колебательность системы М 1,4.
-
Максимальное ускорение изменения давления в системе
 кГс/см2·с2.
кГс/см2·с2. -
Максимально допустимая ошибка
 кГс/см2.
кГс/см2.
-
Масса
-
Габаритные размеры
2. ВЫБОР ЭЛЕМЕНТОВ СИСТЕМЫ И РАСЧЕТ ИХ ПЕРЕДАТОЧНЫХ
ФУНКЦИЙ
Основным критерием выбора элементов является вид питания. Так как микросхемы управляющего контроллера (микропроцессора) питаются от источника постоянного тока, то для уменьшения количества функциональных узлов разрабатываемой САУ следует выбрать элементы, работающие на постоянном токе.
2.1 Выбор и расчет передаточной функции микропроцессора
Среди устройств автоматики наиболее широкое распространение получили МПК серий К580, К588, К1800 [2]. При выборе МПК кроме критериев технической, экономической и технико-экономической эффективности следует руководствоваться следующими соображениями:
-
Допустимое время обработки информации.
-
Высокая производительность МП, достаточный объем ОЗУ и ПЗУ.
-
Возможность цифровой обработки аналоговых сигналов в реальном масштабе времени.
-
Возможность программной коррекции.
-
Малое энергопотребление.
-
Совместимость с другими микросхемами.
-
Доступность элементов.
-
Достаточно мощная и гибкая система команд МП.
-
Достаточно высокий уровень выходного сигнала ЦАП, для дальнейшего его использования.
-
Наличие встроенных ЦАП и АЦП.
-
Для сложных СУ также необходимо несколько каналов ввода-вывода информации.
На основании вышеперечисленных критериев выбор был остановлен на МП серии К1813ВЕ1 [2]. Это однокристальный МП цифровой обработки аналоговых сигналов в реальном масштабе времени, со встроенными аналоговыми системами ввода-вывода (ЦАП и АЦП), с 16-ти разрядным ПЗУ (емкостью 192х24 бит), ОЗУ (емкостью 40х25 слов), 25-ти разрядным ALU, четырьмя входными и восемью выходными аналоговыми каналами, разрешением 0,5% (8 двоичных разрядов и знак).
Этот МП выполнен по высококачественной n-МОП – технологии, совместим с БИС серии К580, высокой степени плотности – 29 тыс. транзисторов на кристалл. Реализована мощная и гибкая система команд с расширенными возможностями адресации памяти, аппаратная реализация процесса совмещения операций выполнения и выборки команд, упрощенное построение мультипроцессорных систем, структура с возможностью наращивания, аппаратная реализация взаимодействия нескольких процессов и микропрограммное управление.
Выбранный микропроцессор обладает необходимой производительностью, мощной и гибкой системой команд и управления обработкой информации, возможностью программной коррекции ЛСУ, совместим с БИС, имеет возможность обрабатывать аналоговый сигнал в режиме реального времени, благодаря встроенным АЦП и ЦАП и доступен.
Энергопотребление МПК можно принять допустимым, учитывая потребляемую мощность встроенных ЦАП и АЦП (суммарная мощность МПК с отдельными микросхемами ввода-вывода информации практически не отличается от мощности данного МПК, хотя непосредственно для МП существуют микросхемы с более низким энергопотреблением). Исходя из времени преобразования сигнала ЦАП, АЦП и тактовой частоты МП время обработки сигнала можно считать малым.
Достаточно высокий уровень выходных сигналов (1-2В, 0,4-2 мА) позволяет использовать данный сигнал в маломощных системах управления без предварительного дополнительного усиления.
Технические характеристики МП К1813ВЕ1:
-
25-ти разрядное ALU.
-
16-ти разрядные ОЗУ (192х24 бит) и ПЗУ (40х25 слов).
-
Разрешение 0,5% (8 двоичных разрядов и знак).
-
Нелинейность ЦАП и АЦП <0,1%.
-
Время преобразования не более 50 мкс.
-
Диапазон рабочих температур 0т –10 до 70 0С.
-
Тактовая частота 5 МГц.
-
Опорное напряжение 2 В.
-
Потребляемая мощность (с учетом потребления ЦАП и АЦП) 1,75 Вт.
-
Входное сопротивление (выборка) не менее 1,5 кОм.
-
Входное аналоговое напряжение не более 2 В.
-
Выходное сопротивление (хранение) не менее 100 кОм.
-
Выходной ток 0,4 - 2 мА.
-
Входной ток не более 2 мА.
-
Ток потребления не более I - 150 мА.
Передаточную функцию микропроцессора принимаем равной единице.
![]() (1)
(1)
2.2 Выбор и расчет передаточной функции усилителя
Исходя из представленных требований, выбираем полупроводниковый усилитель, обладающий следующими свойствами [3]:
-
Возможность работы устройства на постоянном/переменном токе.
-
Большой диапазон коэффициента усиления.
-
Простота конструкции.
-
Низкий уровень помех.
Передаточная функция полупроводникового усилителя имеет вид:
![]() (2)
(2)
Коэффициент kУ определим как отношения выходного сигнала устройства к входному:
![]() (3)
(3)
где UВЫХ – напряжение необходимое для срабатывания электромагнитного
клапана: UВЫХ = 50 В;
UВХ – уровень сигнала (напряжение) поступающего на усилитель с выхода
микропроцессора: UВХ = 5 В.
Таким образом, получили:
![]() (4)
(4)
2.3 Выбор и расчет передаточной функции электромагнитного клапана
Так как основным требованием, предъявляемым к аппаратуре, является её работа на постоянном токе, то для реализации системы необходимо выбрать электромагнитный клапан основой которого является поляризованное реле.
Исходя из условий технического задания, выбирается поляризованное реле типа РП – 5 со следующими техническими характеристиками [3]:
-
Максимальное напряжение на обмотке реле UMAX = 100 В
-
Номинальное возбуждение 10 а-в
-
Нагрузка обмотки Рнагр = 1 Вт
-
Максимальная частота работы fраб = 200 Гц
Клапан имеет характеристику изображенную на рисунке 2.

Рисунок 2 – Характеристика электромагнитного клапана.
Сопротивление обмоток Rобм = 3000 Ом. Достоинствами этого клапана является низкое время запаздывания и срабатывания, развиваемое усилие на шток клапана, возможность частых переключений.
Клапан
имеет нелинейную передаточную функцию,
поэтому проведем линеаризацию. Коэффициент
линеаризации равен
![]() [4], так как линеаризация статическая то
передаточная функция будет приблизительно
равна коэффициенту линеаризации.
Передаточная функция имеет вид:
[4], так как линеаризация статическая то
передаточная функция будет приблизительно
равна коэффициенту линеаризации.
Передаточная функция имеет вид:
![]() (5)
(5)
где В – диаметр условного прохода переходного отверстия электромагнитного
клапана В = 5 см [5];
А – сигнал на входе устройства, поступающий на вход электромагнитного
клапана с выхода усилителя А = 50 В.
Таким образом, получим следующую передаточную функцию клапана:
![]() см/В (6)
см/В (6)