

Курсовые работы / поворотом устройства перемещения робота / Гафиатулин
.pptБАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
Курсовой проект
по дисциплине ЛСУ
Система автоматического управления поворотом устройства перемещения робота
Выполнил: ст.гр. УИТ-53 Гафиатулин А.Г. Проверил:
Скоробогатова Т.Н.
2004
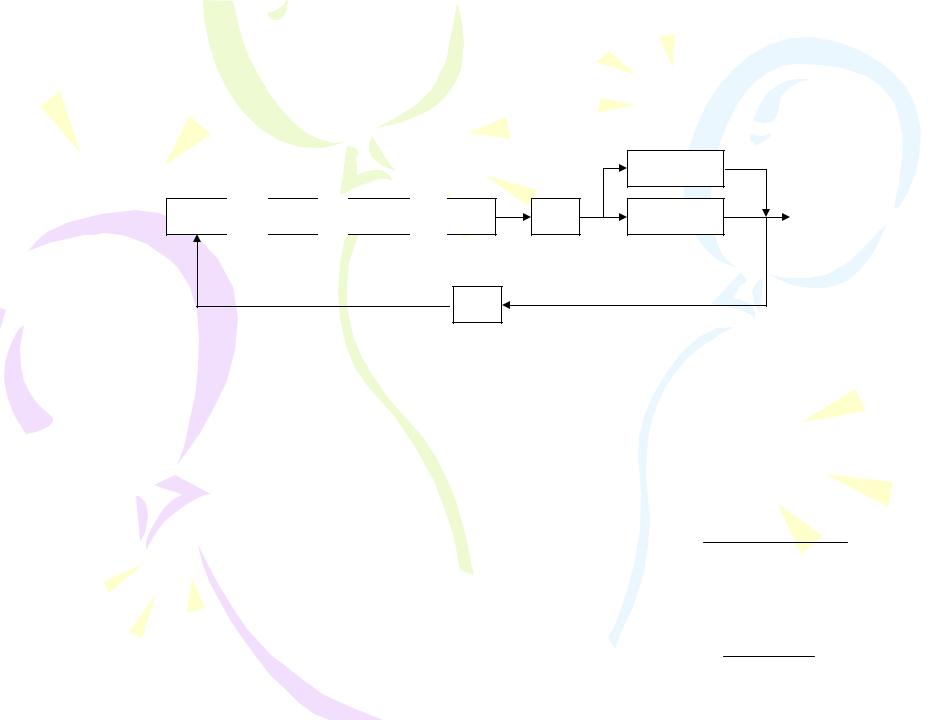
 ФУНКЦИОНАЛЬНАЯ СХЕМА РАЗРАБАТЫВАЕМОЙ САУ
ФУНКЦИОНАЛЬНАЯ СХЕМА РАЗРАБАТЫВАЕМОЙ САУ
Uмп |
Uу |
P |
МП 
 У
У 
 КЛ
КЛ 

 ГЦ
ГЦ
UДос Д
|
1 |
Объект |
Uгц |
|
|
|
1 |
|
Р |
2 |
Объект |
|
2 |
МП – микропроцессор; У – усилитель;
 ЭМКЛ – электромагнитный клапан; ГЦ – гидроцилиндр; Р – редуктор;
ЭМКЛ – электромагнитный клапан; ГЦ – гидроцилиндр; Р – редуктор;
Д – датчик угла поворота
WМП p 1
WУ ( p) 10
WK ( p) 0,127
WГЦ 6,5 1016 р 1
WР p 28,66
WД p 0,628 0,1 P 1

РАСЧЕТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ
 В качестве датчиков обратной связи принимаем индукционный двухотсчётный датчик угла ИПУ-ДУЦ. Датчик ИПУ-ТО является многополюсным вращающимся трансформатором с сосредоточенными волновыми обмотками на сплошных магнитопроводах.
В качестве датчиков обратной связи принимаем индукционный двухотсчётный датчик угла ИПУ-ДУЦ. Датчик ИПУ-ТО является многополюсным вращающимся трансформатором с сосредоточенными волновыми обмотками на сплошных магнитопроводах.
Расчет датчика обратной связи сводится к расчету допустимой температуры нагрева обмотки, а также расчету некоторых геометрических характеристик. Датчик ИПУ-ГО является двухполюсным классическим вращающимся трансформатором с синусоидально распределенными обмотками на роторе и статоре.
Значение максимально-допустимой температуры обмотки:
Диаметр провода обмотки из условия нагрева его максимальным током:
Средняя длина витка обмотки:
Диаметр провода обмотки с изоляцией
Диаметр каркаса:
Qmax |
|
y |
|
|
|
|
|
|
1 103 |
|
|
|
|
502 С |
|||||
E( к |
пр ) |
|
|
|
|
|
|
1,6 10 6 ) |
|||||||||||
|
|
|
1,66 106 (2,8 10 6 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
d 3 |
|
|
4 2 |
|
3 |
|
|
4 0,54 10 4 |
0,32 |
|
0,058 см |
||||||||
Q |
0,5 3,14 1,25 10 |
3 52 |
|
||||||||||||||||
|
|
|
|
R |
f |
d 3 |
700 3,14 1,1 0,0583 |
|
|||||||||||
|
|
l |
|
0 |
|
|
|
|
|
|
|
|
4 0,54 10 4 |
|
|
27,3 см |
|||
|
|
|
4 L |
|
80 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
d1 f d 1,1 0,058 0,064 см |
||||||
|
|
|
|
|
|
|
|
D |
l |
d1 27,3 |
0,064 8,63 см |
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3,14 |
|
|
|
|
||

|
|
|
КАЧЕСТВЕННЫЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ |
|
|
|
||||||||||||
|
|
|
22.858 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WЗам s 6.5 10 7 s2 |
0.1s 23,855 |
|
|
|
|
|
Время регулирования: tp=0,056 с. |
|||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Перерегулирование: |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
hmax hуст 100% |
|
||||
|
|
tmax |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
tн |
|
|
|
|
|
|
|
|
|
|
|
|
|
hуст |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.979 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
||
|
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уст |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hmax 1.671 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
1.671 |
0.979 100% 70.6% |
|||||
h(t) |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.979 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Декремент |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
затухания |
|
|||
|
0.5 |
|
T |
|
|
|
|
|
hуст |
|
|
|
|
|
h1 hmax 1.671 |
|
||
|
|
|
tp |
|
|
|
|
|
|
|
|
|
|
h2 |
1.326 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h1 |
h2 |
|
|
|
|
|
|
|
|
|
hуст |
h1 |
|
0.979 1.671 |
1.994 |
|
|
|
|
|
|
|
|
|
|
|
hуст |
h2 |
0.979 1.326 |
||||||
|
0 0 |
0.01 |
0.02 |
0.03 |
0.04 |
0.05 |
0.06 |
0.07 |
0.09 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Время достижения первого максимума: |
|
tmax=0,0046 c. |
|
|
|
|
|
|
|||||||
|
|
|
Время нарастания: |
|
|
|
tн=0,0025с. |
|
|
|
|
|
|
|||||
|
|
|
Число колебаний за время регулирования: |
|
n=6. |
|
|
|
|
|
|
|
|
|||||
|
|
|
Период колебаний: |
|
|
|
Т=0,0093 с. |
|
|
|
|
|
|
|||||
|
|
|
Частота колебаний: |
|
|
|
|
n |
|
6 |
0.63 |
|
|
|
|
|||
|
|
|
|
|
|
30 |
30 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
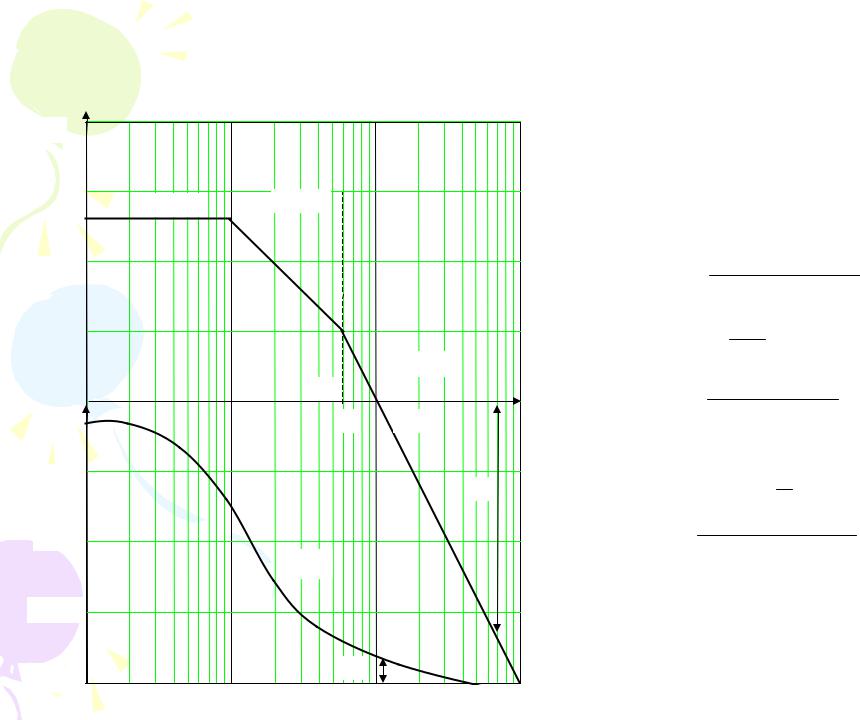
ПОСТРОЕНИЕ ЛАЧХ И ЛФЧХ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
L(λ) 40 |
|
|
|
|
Для |
построения |
ЛАЧХ |
воспользуемся |
|||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
передаточной |
|
|
|
функцией |
разомкнутой |
|||||||||
30 |
0 дб/дек |
-20 дб/дек |
|
|
системы |
в форме |
Z-преобразования |
в |
|||||||||||
27 |
|
|
зависимости от псевдочастоты . |
|
|||||||||||||||
|
|
|
|
|
|||||||||||||||
20 |
|
|
|
|
|
WРаз p |
|
|
|
|
|
22.858 |
|
|
|
||||
|
|
|
|
|
|
6.5 10 7 p2 |
0.1p 1 |
|
|||||||||||
10 |
|
|
|
|
|
W(z) |
|
|
z |
1 |
|
|
W(p) |
|
|||||
|
|
|
|
|
|
|
1 |
|
z |
|
|
p |
, |
|
|||||
|
|
|
-40 |
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
|
λ1 |
λ2 |
дб/дек |
|
|
WРаз z z |
2,003z |
|
|
|
|||||||||
0 |
|
|
|
|
|
||||||||||||||
10 |
50 |
10 |
|
|
1 3,91z |
3,9 |
|
|
|||||||||||
φ(λ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
0 |
|
Произведем замены: |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
-π/4 |
|
|
|
А |
|
z |
1 |
|
|
j |
T0 |
|
|
|
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2получим |
|
||||||
-π/2 |
|
|
|
|
|
W (i ) |
|
|
|
|
22,5 |
|
|
|
|||||
|
|
|
|
|
(0,02i 1) (0,1i 1) |
|
|||||||||||||
|
|
ФЧХ |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для |
построения |
ФЧХ |
используем |
|||||||||||
-3π/4 |
|
|
|
|
зависимость: |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
( ) a tan V ( ) |
|
|
|
|
|
|
|
||||||
-π |
|
Δφ |
|
|
|
|
|
|
|
|
U ( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
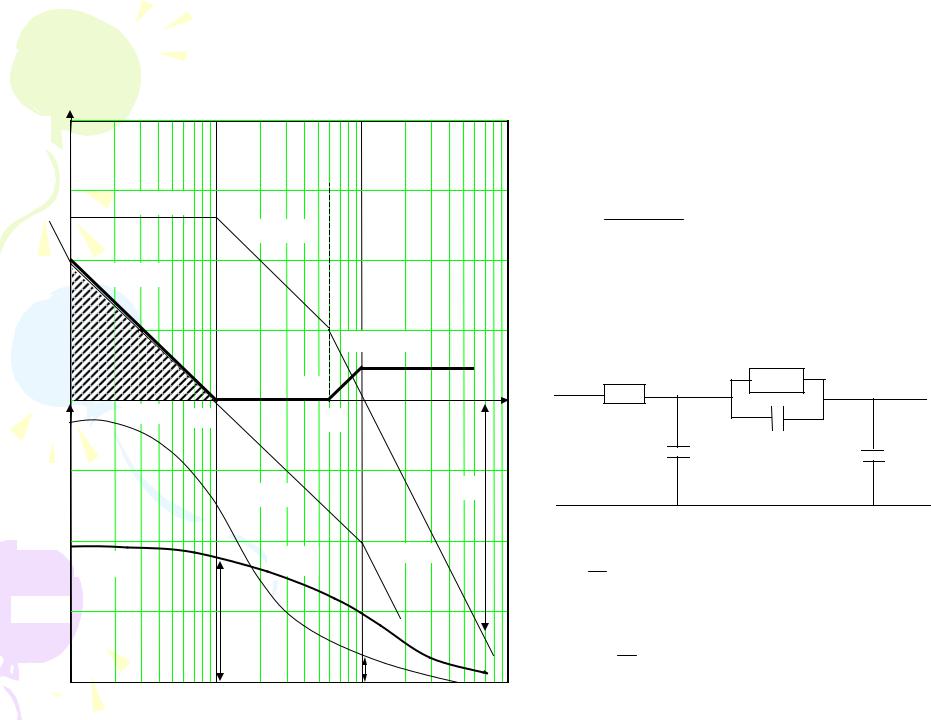
ПОСТРОЕНИЕ ЖЕЛАЕМОЙ ЛАЧХ И ФЧХ СИСТЕМЫ И ЛАЧХ КУ |
|
||||||||||||||||
L(λ) 40 |
|
|
|
|
|
|
ПФ корректирующего устройства: |
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
WКУ WLЖ WL0 |
|
|
|
|
|
|
|||||
30 |
0 дб/дек |
|
|
|
|
|
WКУ k T2 p 1 |
|
|
|
|
|
|
|||||
27 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
a |
|
-20 дб/дек |
|
|
|
|
|
p T3 p 1 |
|
|
|
|
|
|
|||
20 |
|
|
|
|
|
Wку 20 (0,02 р 1) |
|
|
|
|
|
|
||||||
-20 дб/дек |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
p (0,01р 1) |
|
|
|
|
|
|
|||
Lmax |
|
|
|
|
|
|
Корректирующее |
устройство |
системы |
примет |
||||||||
10 |
|
|
|
|
-40 |
|
следующий вид: |
|
|
|
|
|
|
|||||
|
|
|
|
|
Lку |
|
R |
|
|
|
|
|||||||
|
|
|
|
|
дб/дек |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
λ1 |
λ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ(λ) 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
λк = 2 |
λ/ср |
1 |
50 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Lж |
|
0 |
|
Uвх |
|
|
С1 |
|
C3 |
|
|
C2 |
Uвых |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
-π/4 |
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-20 дб/дек |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-π/2 |
b |
|
|
|
|
|
Параметры RC – |
|
|
|
|
|
||||||
|
ЖФЧХ |
|
ФЧХ |
|
-40 |
|
цепочки: R |
|
|
|
|
R1 = 2·104 Ом, |
|
|||||
|
|
|
|
|
дб/дек |
T1 C |
|
|
|
|
С1 = 2 105 Ф |
|
||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||
-3π/4 |
|
|
|
|
|
|
R2 C2 T2 , |
|
|
R2 1,5 105 Oм, |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
Δφж |
|
|
|
T |
|
|
C |
|
T , |
С2 |
0,048 10 6 Ф |
|
|||
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
6 |
|
|
|||
|
|
|
|
|
Δφ |
|
3 |
|
|
|
|
2 |
C3 |
0,6 |
10 |
Ф |
|
|
-π |
|
|
|
|
|
|
|
|
C3 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
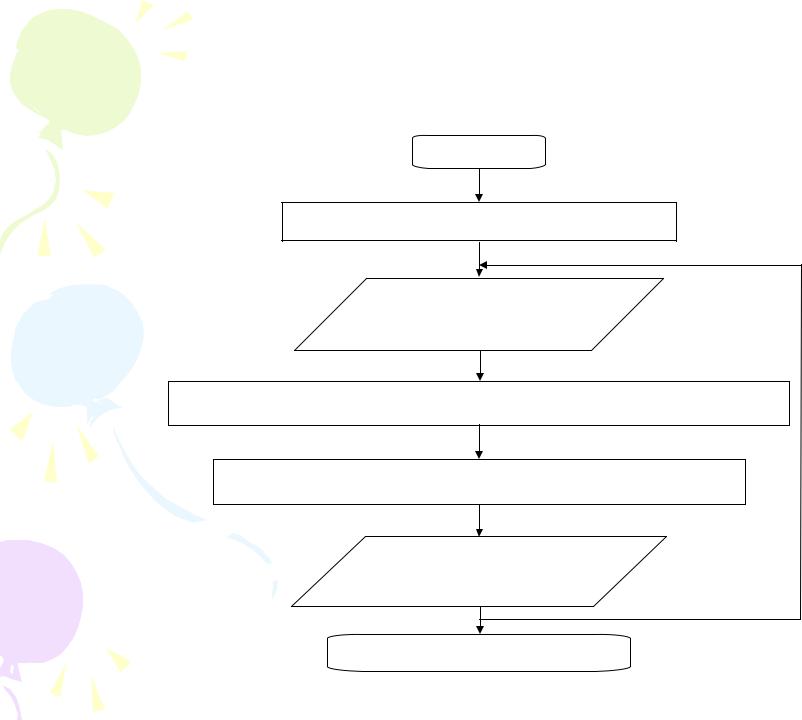
БЛОК СХЕМА АЛГОРИТМА КОРРЕКЦИИ
Начало
Yk = 0; Yk-1=0; Yk-2=0; Xk= 0; Xk-1 = 0; Xk-2 = 0
Чтение входного сигнала и помещение его в Xk-1
Y(k) = - 54X(k) - 46X(k-1) - 100X(k-2) +1,04Y(k) –0,96Y·(k-1) - 0,08Y(k- 2)
Yk-3 = Yk-2; Yk-2 = Yk-1; Yk-1 = Yk; Xk-3 = Xk-2; Xk-2 = Xk-1; Xk-1 = Xk
Вывод управляющего сигнала Yk
Конец