

4. Построение лачх системы и её анализ
Для построения ЛАЧХ и ЛФЧХ разомкнем систему.

 (55)
(55)
Используя программу Mathсad, подставив значения функций, получим
выражение передаточной функции разомкнутой системы автоматического управления:

Найдем дискретную передаточную функцию разомкнутой системы. Для этого необходимо провести z – преобразований, воспользовавшись программным продуктом MathLab.

Далее необходимо перейти к псевдочастоте, осуществив биполярные преобразования. Для этого производится замена:
 .
(58)
.
(58)
А затем перейдем от ω-изображения к передаточной функции от псевдочастоты, сделав подстановку:
 ,
(59)
,
(59)
Используя возможности программы MathCad, выполним вышеперечисленные преобразования, тогда получим:

Построим ЛАЧХ и ЛФЧХ, применив редактор Matlab.
Листинг программы:
>> w=tf([3.38 -500],[ 3 2 -205 15])
Transfer function:
3.38 s - 500
--------------------------
3 s^3 + 2 s^2 - 205 s + 15
>> margin(w)
>> grid

Рисунок 6 – ЛАЧХ и ЛФЧХ разомкнутой системы
5 Построение желаемой лачх системы, лачх корректирующего устройства
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства. Желаемая ЛАЧХ (ЖЛАЧХ) состоит из трех основных асимптот: низкочастотной, среднечастотной и высокочастотной. Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы – устойчивость и показатели качества переходной характеристики.
Поскольку в исходной САУ присутствует дискретное устройство, построение желаемой ЛАЧХ ведется методом запретной зоны.
Построение ЖЛАЧХ начинаем с построения запретной зоны, для чего необходимо найти координаты рабочей точки.
Найдем значение частоты рабочей точки:
 с-1,
(60)
с-1,
(60)
где g1 - скорость изменения входного сигнала;
g11- ускорение изменения.
Найдем значение амплитуды рабочей точки:
 ,
(61)
,
(61)
Таким образом, рабочая точка имеет следующие координаты:
 .
.
Через полученную точку A проводим прямую с наклоном -20 дБ/дек. Эта прямая является верхней границей запретной зоны.
По
номограмме Солодовникова (рисунок 9) и
заданному в техническом задании
перерегулированию
 % и времени регулирования
% и времени регулирования
 c определяем частоту среза:
c определяем частоту среза:

Рисунок 7 - Номограмма Солодовникова
 ;
;
 ;
(62)
;
(62)
 ;
(63)
;
(63)
 .
(64)
.
(64)
По заданной колебательности М=1,09 найдем среднечастотную область построения ЖЛАЧХ.
 ;
(65)
;
(65)
Найдем границы среднечастотной области. Верхней границе этой области соответствует значение:
 ;
(66)
;
(66)
нижней границе этой области соответствует значение:
 .
(67)
.
(67)
Наклон ЖЛАЧХ в среднечастотной области должен быть -20 дБ/дек и она должна пересекать ось частот в точке ωср.

Рисунок 7— Реальная, аппроксимированная, желаемая ЛАЧХ и ЛАЧХ корректирующего устройства
По виду построенной ЖЛАЧХ определяется передаточная функция желаемой разомкнутой системы:

6 РАСЧЕТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
6.1 Расчет аналогового корректирующего устройства
По стандартным наклонам запишем передаточную функцию корректирующего устройства.
 .
(69)
.
(69)
По таблицам из атласа Топчеева, подберем корректирующее устройство.
R2
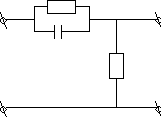
C1
R1
Рисунок 8 – Cхема последовательного корректирующего устройства
Передаточная функция RC-цепочки:
 . Определим
по графику частоты среза:
. Определим
по графику частоты среза:
wСР1 = 15 c-1;
wСР2 = 150 c-1;
Постоянная времени вычисляется по формуле:
Т =
 .
(70)
.
(70)
Вычислим значения Т:
 с;
с;
 с;
с;
где
 (71)
(71)
T1= R2C1 (72)
Задаемся значениями:
R1=R2 =1000 Ом
Тогда:
 Ф
Ф

Подставляя все найденные параметры в выражение для передаточной функции корректирующего устройства (70) получаем передаточную функцию в следующем виде:
 (73)
(73)
Корректирующее устройство представляет собой R-C цепочку, имеющую на входе и на выходе импульсы напряжения.
Для коррекции системы используется корректирующее устройство последовательного типа, поскольку оно обеспечивает наиболее простую схему включения, не требует сложных элементов для согласования, передает значительные величины управляющих сигналов (тока, напряжения), кроме того расширяет полосу пропускания частот при наличии дифференцирующих звеньев в цепи регулирования, что позволяет передавать большую мощность сигнала.
Как известно, корректирующее устройство можно включать между различными элементами исходной системы. При выборе места включения руководствуются минимумом вносимой устройством погрешности.
Система, в которую необходимо включить корректирующее устройство, состоит из: микропроцессора, усилителя, двигателя, редуктора, емкости , нагревательного элемента и датчика температуры. Ниже анализируются возможные места включения корректирующего устройства.
Включение электрического корректирующего устройства в виде RC-цепочки между двигателем и редуктором не представляется возможным, так как сигнал, снимаемый с двигателя, носит неэлектрический характер. Включение электрического корректирующего устройства между редуктором и емкостью, емкостью и нагревательным элементом по той же причине не представляется возможным.
Включение корректирующего устройства между датчиком температуры и собственно микропроцессором усложняет обратную связь системы, что может отрицательно повлиять на быстродействие системы, поэтому такое включение хоть и возможно, но не желательно.
Остается один вариант: между микропроцессором и усилителем. Малое выходное сопротивление порта микропроцессора позволяет легко согласовать его с RC-цепочкой корректирующего звена и практически без потерь передать сигнал. Кроме того, такое включение не усложняет цепь обратной связи, что благоприятно сказывается на быстродействии системы.
СМ
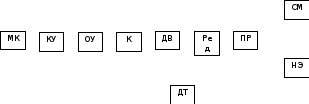
НЭ
Рисунок 9- Полученная структурная схема скорректированной системы