

7 Синтез корректирующего устройства
7.1 Синтез параллельного корректирующего устройства
Задача синтеза, возникающая при проектировании системы автоматического регулирования, заключается в таком выборе структурной схемы системы и технических средств ее реализации, при котором обеспечиваются требуемые динамические и эксплуатационные свойства всей системы в целом.
Для нашей системы определяющим параметром является точность, так как робототехнический орган – захват, необходим для удержания объекта и не должен приводить к его порче. Передаточная функция необходимого КУ была найдена на предыдущем этапе, теперь требуется определить структурную схему КУ, его элементную базу и параметры необходимых элементов.
Для синтеза аппаратного корректирующего устройства будем применять RC-цепочки, согласно (58). Но для упрощения разобьем наше КУ на два последовательных
![]() (41)
(41)
На рисунках 13 и 14 представлены первый и второй каскады корректирующего устройства.







Рисунок 13 – Первый каскад корректирующего устройства
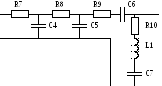







Рисунок 14 – Второй каскад корректирующего устройства
Для получения требуемого коэффициента усиления были поставлены 3 операционных усилителя.
Выберем емкости конденсаторов для 1, 2 и 3 звеньев первого каскада:
C1=С2=С3=20
нФ, т.е. ![]() (кОм),
(кОм),
![]() (кОм)
(кОм)
![]() (кОм),
(кОм),
![]() (кОм)
(кОм)
![]() (мОм),
(мОм),
![]() (кОм)
(кОм)
Выберем емкости для второго каскада: С3=С4=100мФ
![]() (Ом)
(Ом)
![]() (Ом)
(Ом)
Для последнего звена: C7=10мкФ, C6=20мкФ, L1=200Гн.
![]() (Ом)
(Ом)
![]() (Ом)
(Ом)
На рисунке 15 представлена функциональная схема с корректирующим устройством.
ЭВМ
У
ДПТ
Р
ЗАХ
З
ВУ1
IPУ P
IdP
IУ
ωДВ l
ВУ2
Idl
КУ














ДД P
IP
ДЛ l
Il


Рисунок 15 - Функциональная схема САУ захватом руки робота
андроида с корректирующим устройством
Построим для системы с корректирующим устройством переходный процесс и определим показатели качества.
Переходный процесс строится с использованием програмы MathCad и представлен на рисунке 16.
Из графика видно, что процесс позиционирования захвата значительно улучшился. За 4 секунды захват способен осуществить позиционирование (5 секунд по техническому заданию).
Из всего сказанного можно сделать вывод, что коррекция системы проведена успешно, корректирующее устройство справляется со своей задачей. Система увеличила запасы устойчивости, увеличилось быстродействие.
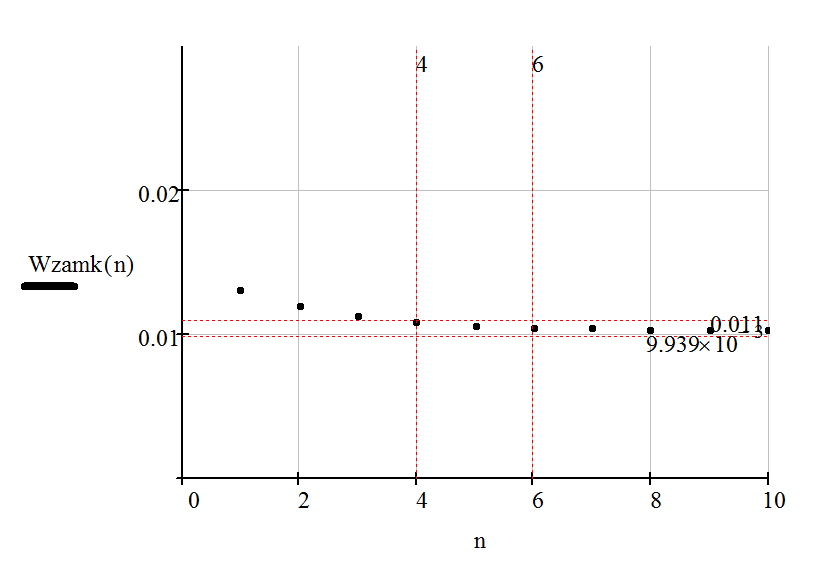
Рисунок 16 – Переходный процесс скорректированной системы.
7.2 Синтез программного корректирующего устройства
![]()
Запишем передаточную функцию корректирующего устройства в виде z-разностных уравнений, для чего воспользуемся программой для преобразования передаточной функции в разностное уравнение (рисунки 17-20).

Рисунок 17 – Задание начальных параметров (шаг 1)
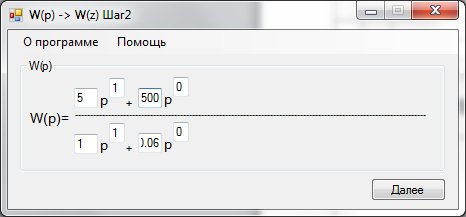
Рисунок 18 – Ввод передаточной функции (шаг 2)
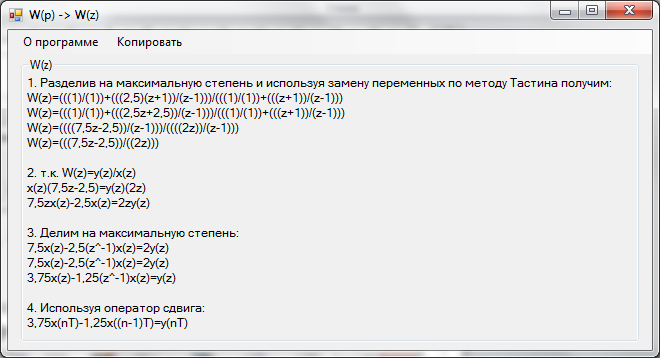
Рисунок 19 – Результат преобразования (шаг 3)
Рисунок 20 – Окно «О программе»
Ук(nT)= 3,75x(nT)-1,25x((n-1)T)
Код программы коррекции:
;Расчет разностного уравнения
; x - входной сигнал
; y- выходной сигнал
i_port EQU 1lh; номер порта для чтения
o_port EQU 12h; номер порта для записи
Al EQU 3.75;
А2 EQU 1.25;
B1 EQU 0;
xl, x2, DB 0
;выделение памяти под переменные x(k-l), x(k-2)
yl, DB 0
; выделение памяти под переменную y(k-l)
; вычисляем значение выражения y(k)=Al*х1+А2*х2+В1*у1
start: ;метка начала цикла коррекции
in al, i_port; чтение данных из порта
mov al,Al; вычисление слагаемого А1*х1
mov bl, al; сохранение результата в bl
; в результате имеем А1*х1 в регистре bl
mov al, X2; вычисление
mul al, А2; слагаемого А2*х2
add bl, al; прибавление к предыдущему результату
; в результате имеем А1*х1+А2*х2 в регистре bl
mov al, yl; вычисление
mul al, Bl; слагаемого Bl*yl
add bl, al; прибавление к предыдущему результату
add bl, al; прибавление к предыдущему результату
; в регистре bl имеем результат вычисления всего выражения
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы