

5 Построение лачх и лфчх непрерывной системы
Для определения запасов устойчивости требуется построение логарифмических характеристик для разомкнутой системы. Для дальнейшего исследования, передаточную функцию разомкнутой системы подвергаем z – преобразованию.
Передаточная функция разомкнутой системы имеет вид:
![]()
Заменим
z на выражение от псевдочастоты :
z=![]() ,
где
,
где![]() ,
получим:
,
получим:
![]()
![]()
Полученная ЛАЧХ приведена на рисунке 8

Рисунок 8 - ЛАЧХ непрерывной системы
Построение ЛФЧХ произведем по выражению:
(36)![]()
ЛФЧХ разомкнутой системы вместе с ЛАЧХ приведены на рисунке 9.

Рисунок 9 – ЛФЧХ разомкнутой системы
Из графика определим запасы устойчивости:
запас по амплитуде 0 дБ
запас по фазе 00
6 Построение желаемой лачх и лачх корректирующего устройства.
6.1 Построение жлачх
Для построения ЖЛАЧХ воспользуемся методом запретных зон, используя номограмму Солодовникова (рисунок 10).

Рисунок 10 – Номограмма Солодовникова
Согласно
номограмме Солодовникова (выбираем
перерегулирование 20%) псевдочастота
среза
![]() Гц, где время регулированияtP=0.158.
Или, в логарифмическом масштабе,
lg(λСР)=1.8.
Гц, где время регулированияtP=0.158.
Или, в логарифмическом масштабе,
lg(λСР)=1.8.
Определим ограничивающие асимптоты:
![]() дБ
дБ
![]() дБ
дБ
Необходимо провести прямую с наклоном 20 дБ/дек, через частоту среза до пересечения с ограничивающими асимптотами.
Запретная зона строится исходя из скоростных характеристик цифровой системы, которые заданы в техническом задании.
Определим положение рабочей точки.
Псевдочастота
рабочей точки
![]()
Амплитуда
рабочей точки
![]()
В логарифмическом масштабе (0.06;32.611). Через эту точку проводим низкочастотную асимптоту с наклоном минус 20 дБ/дек (рисунок 11).
За пределами полосы, ограниченной заданной колебательностью, ЖЛАЧХ совпадает по наклону с низкочастотной частью построенной ЛАЧХ.
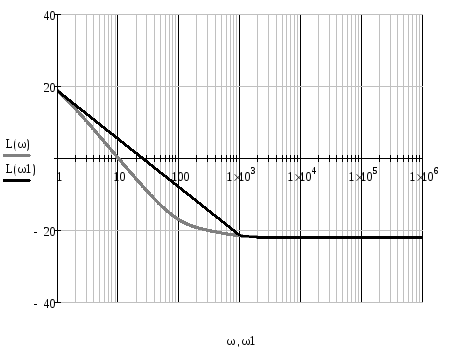

Рисунок 11 – ЛАЧХ и ЖЛАЧХ системы
Из графика восстановим передаточную функцию ЖЛАЧХ и корректирующего устройства.
Частоты сопряжения для ЖЛАЧХ:
ω1=0.06; ω2=1000.
Передаточная функция запишется, как:
Т2*р+1 / Т1*р+1
![]() (37)
(37)
6.2 Построение лачх корректирующего устройства
Частоты сопряжения для ЛАЧХ корректирующего устройства:
ω1=0.06; ω2=1000
![]() (38)
(38)
Была получена передаточная функция последовательного корректирующего устройства, которое будет влиять на быстродействие системы, однако исследуемой системе требуется параллельное корректирующее устройство, т.к. необходимо повышать точность.
Для перехода от последовательного КУ к параллельному воспользуемся формулой перехода
WПАРКУ=WУ*(WПОСКУ-1) (39)
где: WУ – передаточная функция устройства, требующего коррекции;
WПОСКУ – передаточная функция последовательного корректирующего
устройства.
Для нашей системы определяющим параметром является точность, так как робототехнический орган – захват, необходим для удержания объекта и не должен приводить к его порче. Поэтому применим параллельное корректирующее устройство (КУ).
Определимся устройством, которому требуется коррекция. Просмотрев список устройств в системе можно прийти к выводу, что наиболее инерционным является ДПТ. Физически это трудно осуществимо, поэтому будем корректировать усилитель, т.к. он непосредственно воздействует на двигатель.
Передаточная функция усилителя:
![]() (40)
(40)
![]()
ЛАЧХ параллельного КУ строится зеркальным отображением относительно желаемой ЛАЧХ.
ЛАЧХ параллельного КУ изображена на рисунке 12.
+20дБ
0дБ
КУЛАЧХ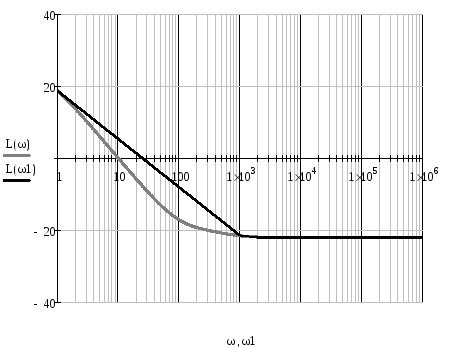

Рисунок 12 – ЛАЧХ, ЖЛАЧХ и КУЛАЧХ системы