

2 Выбор и обоснование выбора элементной базы локальной системы управления
2.1 Выбор микропроцессора
Робототехника является развивающейся дисциплиной. Многие подходы известны уже сегодня, но вряд ли кто-нибудь сможет сказать, какие методы и технологии конструирования будут использоваться через сто лет. Как и биологические системы, робототехника развивается в соответствии с Дарвиновской моделью «естественного отбора». Поэтому, какой бы мощный из ныне существующих процессоров мы не выбрали, с уверенностью можно сказать, что к моменту создания первого Терминатора в том виде, в котором он представлен в одноименных фильмах, он [процессор] будет не сравним с используемым в Терминаторе.
2.1.1 Расчет передаточной функции микропроцессора. Передаточная функция цифрового устройства микропроцессор является стандартной W(p)=1.
2.2 Выбор захвата робота
Определим геометрические размеры и технические параметры захвата. Собственно для захвата, как механического устройства основными ограничениями могут стать прочностные характеристики для материала, из которого изготовлен захват. Учитывая специфику темы курсового проекта, выбирать реально существующие захваты не имеет смысла. Однако задать основные параметры, близкие к параметрам руки взрослого человека мы можем.
2.2.1 Технические характеристики захвата
- максимальный угол захвата, градусы 90;
- допустимая нагрузка, кПа 400;
- габаритные размеры (соответствуют размерам ладони взрослого человека), мм 200х100х15;
2.2.2 Расчет передаточной функции захвата. Передаточную функцию определим по формуле (1):
![]() .
(1)
.
(1)
где: l – перемещение пальцев захвата, см;
lмз – перемещение штока механизма захвата, см.
Т.о.
коэффициент передачи захвата составляет![]()
2.3 Выбор редуктора
Редуктор предназначен для передачи механической энергии от электродвигателя к исполнительному органу системы и согласования скоростей вращения. Для системы требуется перемещение штока со скоростью равной 5 см/с. Но точность должна быть высокой, для таких целей нужно использовать винтовую передачу (рисунке 2).
Рисунок 2 – Конструкция редуктора
В винтовой передаче используется винт и гайка, основными интересующими характеристиками являются шаг резьбы (для винта и гайки одинаковы).
2.3.1 Расчет передаточной функции редуктора. Требуемый коэффициент передачи составляет:
![]() см/рад.
(2)
см/рад.
(2)
Для такого типа передачи нужный диметр гайки составляет
![]() (3)
(3)
где: V – линейная скорость перемещения, см/с;
ω – угловая скорость, рад/с,
имеем:
![]() =4
мм
=4
мм
По ГОСТ для гайки такого размера шаг резьбы составляет: 0.8 мм. Т.о. имеем передаточную функцию: W(p)=0.2.
2.3.3 Расчет винтовой передачи. Долговечность шариковой винтовой передачи определяется по формуле:
![]() (4)
(4)
где:С - статическая грузоподъемность, кН;
Q - эквивалентная динамическая нагрузка, кН.
Приблизительное значение критической осевой силы можно определить по номограмме (рисунок 3).
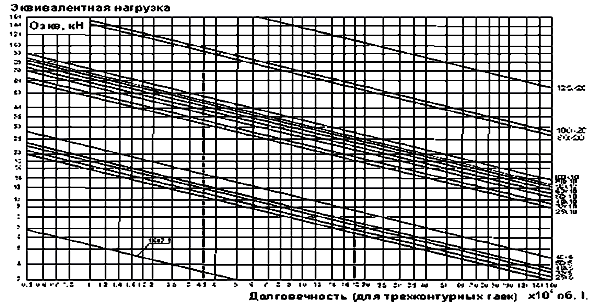
Рисунок 3 – Номограмма распределения критической осевой силы
Таблица 1 – Значения эквивалентной динамической нагрузки
|
Qi1 |
Qj2 |
t |
N |
q'i1 |
q'j2 |
q"j2 |
|
кН |
% |
об/мин |
кН |
|
|
|
|
7 |
- |
40 |
10 |
10.66 |
- |
- |
|
10 |
- |
25 |
20 |
12.63 |
- |
- |
|
5 |
- |
20 |
100 |
9.43 |
- |
- |
|
0.3 |
- |
5 |
1000 |
6.85 |
- |
- |
|
- |
4 |
5 |
500 |
- |
8.85 |
4.85 |
|
- |
3 |
5 |
200 |
- |
8.28 |
5.28 |
В таблице 1 приведены данные необходимые для расчета.
Эквивалентная динамическая нагрузка передачи Q определяется как наибольшее значение из двух эквивалентных нагрузок Q1 и Q2, действующих на каждую из гаек.
На передачу, собранную с силой предварительного натяга, со стороны первой гайки действуют осевые силы Qi1 (i=1,2,...,k), а со стороны второй гайки осевые силы Qj2 (j=1,2,...,k).
Продолжительность действия сил в процентах к общему времени - ti1 и tj2, соответствующее им число оборотов винта (гайки) - ni1 и nj2.
Силы, действующие на первую гайку обозначим q'i1 и q'j2, на вторую, соответственно, q''i1 и q''j2.
Силы, действующие на гайку определяются по формуле:
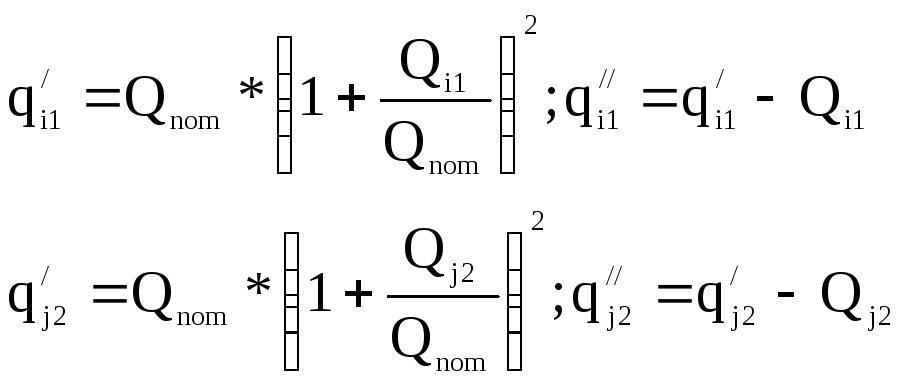 (5)
(5)
Эквивалентная нагрузка на первую гайку:
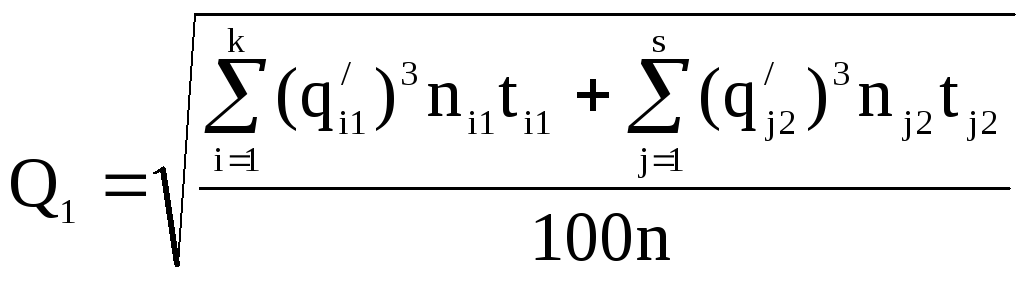 (6)
(6)
 (7)
(7)
где: n - среднее число оборотов при постоянной нагрузке и переменной
скорости вращения, об/мин.
Аналогично находим эквивалентную нагрузку Q2, действующую на вторую гайку. Силы предварительного натяга определяются по формуле:
![]() (8)
(8)
где: Mxx - момент холостого хода, Нм;
d0 - расчетный диаметр передачи, мм;
rш - радиус шарика, мм.
На
передачу, собранную с предварительным
натягом QН=
6.7 кН, действуют со стороны первой гайки
осевые силы Q11=7
кН, Q21=10
кН, Q31=5
кН, Q41=
0.3 кН, а со стороны второй гайки осевые
силы Q12=
4 кН, Q22=
3 кН. Угловая скорость вращения передачи
составляет 25 рад/с, т.е. n=30*25/π=239![]() .
.
Эквивалентная нагрузка на гайку:
![]() (кН)
(кН)
Статическая
грузоподъемность C=17.7
кН. Т.о. долговечность
![]() оборотов.
оборотов.