

4.Синтез корректирующего устройства.
4.1.Синтез корректирующего устройства методом Соколова.
На первом этапе определяется разность порядков полиномов знаменателя (n1) и числителя (m1) передаточной функции замкнутой нескорректированной системы
(n1-m1).
n1-m1=4-0=4
ν=1
На втором этапе формируется желаемая передаточная функция замкнутой системы, удовлетворяющая заданным требованиям к качеству синтезируемой системы на основе нормированных передаточных функций.
Требования к синтезируемой системе:
зад=20 %;
![]() =0,25,
с
=0,25,
с
При формировании желаемой передаточной функции
![]() степени
m
и n
соответственно полиномов B(S)
и A(S)
выбирают,
степени
m
и n
соответственно полиномов B(S)
и A(S)
выбирают,
исходя из следующих соотношений:
m=ν-1=1-1=0,
n=(n1-m1)+ν-l=4+1-1=4,
Нормированная передаточная функция Фн(р) будет иметь те же порядки n и m. Коэффициенты этой функции определяют из соответствующей Таблицы А.1 Приложение. Минимальное время регулирования в приложении.
![]()
![]()
По переходной характеристике нормированной функции (рис.4.1) определяют время переходного процесса τн.
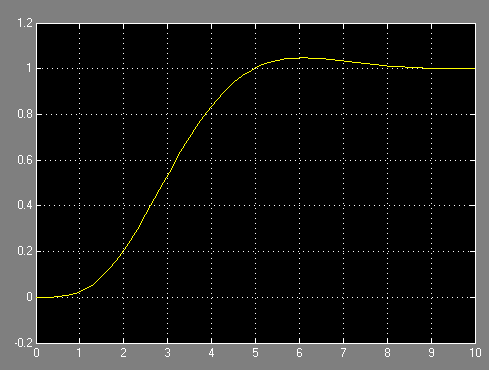
Рис.4.1
τн=4.58 c.
Переход от Фн(р) к Фж(s) производится на основании теоремы масштабов преобразования Лапласа с использованием следующего соотношения
p=sz,
![]()
Желаемую передаточную функцию можно получить, из равенства
Фж(s)=Фн(sz)
![]()
![]()
![]()
Структурная схема скорректированной системы изображена на рис.4.2. Н определить передаточную функцию корректирующего устройства (КУ).
 f(t)
f(t)
W2(s) W1(s)

 g(t)
x(t)
g(t)
x(t)










Wку(s)


р ис.4.2
ис.4.2
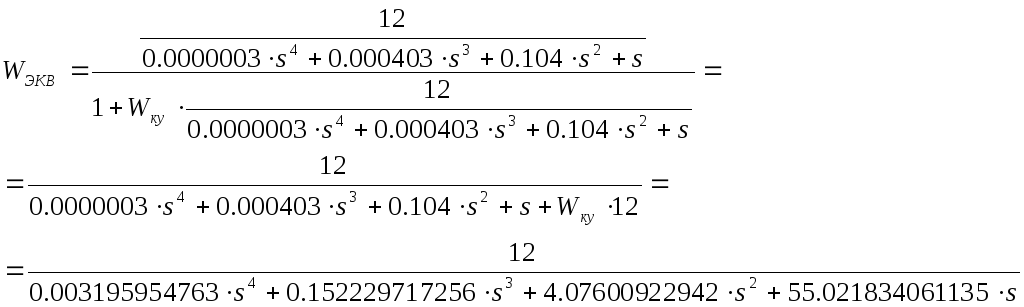
Для упрощения вычислений вначале нужно записать эквивалентную передаточную функцию объекта управления и КУ.
![]()
Передаточная функция скорректированной системы запишется как
 ;
;
![]() ;
;
![]() ;
;
![]() .
.
Откуда можно выразить передаточную функцию корректирующего устройства
![]() ;
;
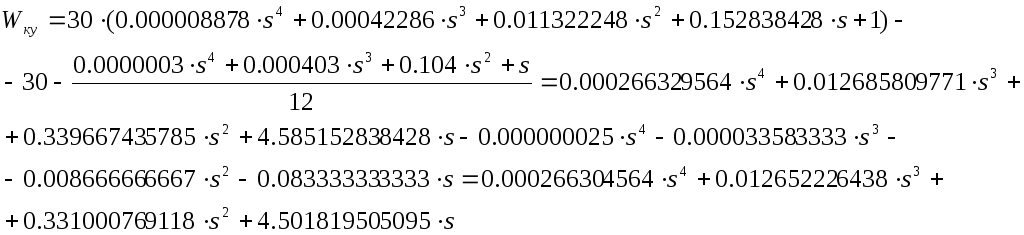
При подстановке
исходных данных выражение
![]() примет
вид
примет
вид
 .
.
4.2.Анализ качества скорректированной сау.
Переходная характеристика скорректированной системы изображена на рис.4.3
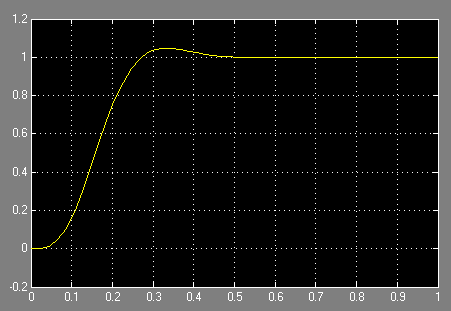
Рис.4.3
Время регулирования и перерегулирование численно равны
tрег=0.25 c =4.23 %.
Полученные значения удовлетворяют требованиям к синтезируемой системе.
Оценка запасов устойчивости по модулю и по фазе путем построения ЛАХ и ЛФХ (рис.4.4)
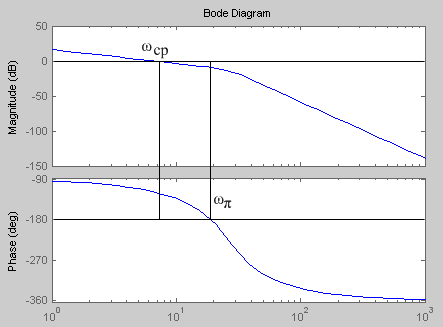
рис.4.4
По рис.4.5 определяют запасы устойчивости по модулю и по фазе, а так же ωπ и ωср
![]()
![]()
Система устойчива
так как
![]() .
.
Определение коэффициентов ошибок.
С помощью MatLab можно определить значение коэффициентов ошибок:
![]() ;
;
![]() ;
;
![]() .
.
Полученные коэффициенты ошибок отличаются от заданных, потому что в качестве главного критерия при формировании передаточной функции желаемой системы выступало минимальное время регулирования.
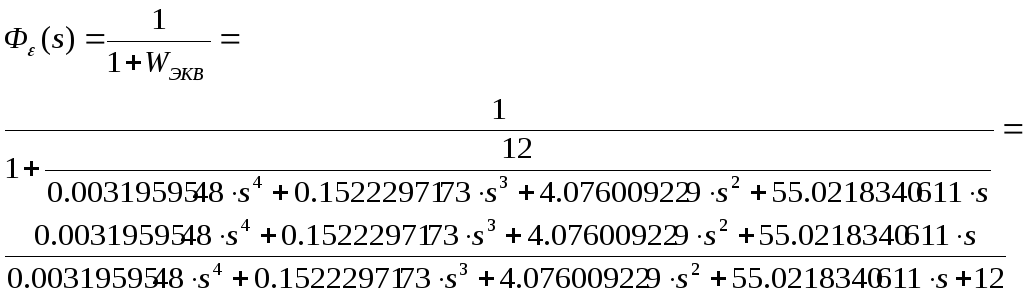
4.3.D-разбиение в области одного параметра.
Метод D-разбиения заключается в определении допустимой области изменения одного или нескольких параметров, при условии, что система не потеряет свою устойчивость.
Во-первых, необходимо записать передаточную функцию замкнутой системы и характеристичное уравнение
![]() ;
;
 ;
;
![]() .
.
Передаточная функция скорректированной системы в общем виде
![]() .
.
Характеристическое уравнение имеет вид
![]() .
.
Во-вторых, необходимо
выразить
![]() через остальные
параметры
через остальные
параметры
![]() ;
;
![]() .
.
При s→jω выражение примет вид
![]()
После постановки выпажени примет вид
![]() .
.
Кривая D-разбиения
в области параметра
![]() изображена на рис.4.5
изображена на рис.4.5
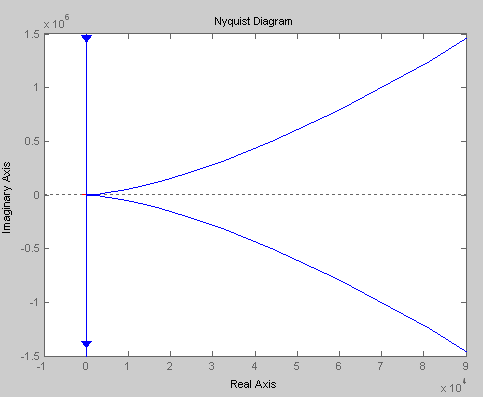

Рис.4.5
Так как параметр
![]() должен принимать только действительные
значения, то в полученной области
необходимо выбрать только те значения,
при которых Im(
должен принимать только действительные
значения, то в полученной области
необходимо выбрать только те значения,
при которых Im(![]() )=0.
)=0.
Область значений![]() :
:
![]()
Необходимо
проверить, будет ли являться данный
диапазон областью устойчивости, приняв
![]() равным любому значению из данного
диапазона.
равным любому значению из данного
диапазона.
Пусть
![]() .
Передаточная функция замкнутой системы
примет вид:
.
Передаточная функция замкнутой системы
примет вид:
![]()
Требуется проверить устойчивость данной системы по любому из критериев устойчивости. На рис.4.6 изображен годограф скорректированной системы в разомкнутом виде.
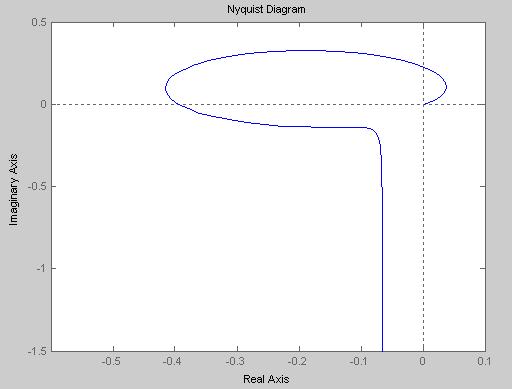
Рис.4.6
Годограф не охватывает точку (–1; j0). Система устойчива по Найквисту.