

курсовая работа / analiz_sistemy_sintez_korrektiruyushih_ustroystv_opredelenie / 2.1 Синтез параллельного КУ
.doc2. Синтез корректирующих устройств (КУ)
Для синтеза корректирующих устройств используем графо-аналитический метод
2.1 Синтез параллельного КУ
2.1.1 Параметры для построения различных ЛАХ
Для синтеза корректирующего устройства необходимо знать ЛАХ нескоректированной системы и ЛАХ охватываемой внутренней обратной связью части системы.
Для начала объеденим все ПФ сервопривода в эквивалентную ПФ, подобрав параметры системы таким образом, чтобы она была устойчивой, чего будет нам вполне достаточно.
Рассмотрим сервопривод, структурная схема которого приведена на рисунке 6.
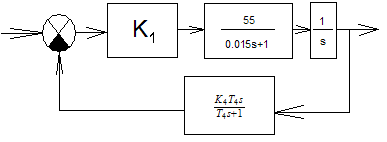
Рисунок 6

![]()
Для нахождения
неизвестных параметров
![]() ,
оценим устойчивость системы по критерию
Гурвица, согласно которому система
будет устойчива, если все n
диагональных миноров матрицы, составленной
из коэффициэнтов характеристического
уравнения D(S)
, будут положительными.
,
оценим устойчивость системы по критерию
Гурвица, согласно которому система
будет устойчива, если все n
диагональных миноров матрицы, составленной
из коэффициэнтов характеристического
уравнения D(S)
, будут положительными.
![]()
![]()
![]()


Δ3= a1 a3 0
a0 a2 0
0 a1 a3
![]()
![]()
![]()
![]()
Так как T4>0 и K4>0, то для простоты примем K4=1
![]()
T4 = - 0.07 5002 и T4 = - 0.0 15
Но так как T4 должна быть положительной, то примем T4 =0.01
![]()

В итоге получим структурную схему, представленную на рисунке 7
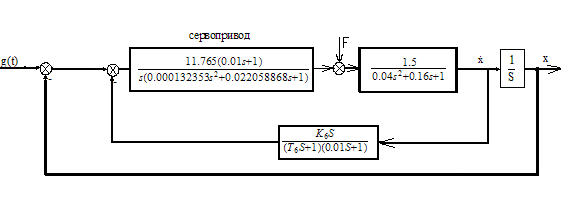
Рисунок 7
Следовательно,
![]() будет равно:
будет равно:
![]()
![]()
Начальный наклон будет равен -40 дб/дек.
Wохв будет аналогичен Wнеск , только без интегратора, соответственно частоты сопряжения будут те же, поменяется тоько начальный наклон, который будет равен -20 дб/дек.
Построение желаемой ЛАХ:
Выбор вида желаемой
ЛАХ определяет показатели качества
синтезируемой системы. При построении
желаемой логарифмической амплитудной
характеристики выделяют три области:
низкочастотную, среднечастотную и
высокочастотную. Низкочастотная
асимптота желаемой ЛАХ выбирается
исходя из требований, предъявляемых к
точности системы. Её наклон определяет
порядок астатизма
![]() системы и равен
системы и равен
![]() В нашем случае
порядок астатизма равен 2. Помимо
скоростной ошибки, предъявляются
требования
к
величине
динамической ошибки системы
В нашем случае
порядок астатизма равен 2. Помимо
скоростной ошибки, предъявляются
требования
к
величине
динамической ошибки системы
![]() в режиме низкочастотных гармонических
колебаний задающего воздействия
в режиме низкочастотных гармонических
колебаний задающего воздействия
![]() при частоте w1.
Можно рассчитать контрольную точку
выше которой должна проходить желаемая
характеристика:
при частоте w1.
Можно рассчитать контрольную точку
выше которой должна проходить желаемая
характеристика:
![]()

![]()
Так как значение перерегулирования и времени переходного процесса не заданы, а задан необходимый запас устойчивости по фазе, то примем δ=15% и b=1.7
Найдем время переходного процесса tрег: по формуле [1, с.341]:
 ,
,
где
![]() - максимальное усорение,
- максимальное усорение,
![]() - установившаяся ошибка слежения.
- установившаяся ошибка слежения.
![]()
![]()
Проведение желаемой
ЛАХ на 3дб выше (с учётом погрешности
асимптотической ЛАХ) точки с координатами
![]() обеспечивает динамическую ошибку не
больше заданной.
обеспечивает динамическую ошибку не
больше заданной.
В среднечастотной
области расположение асимптоты желаемой
ЛАХ определяется по заданному времени
переходного процесса при условии
обеспечения требуемых запасов
устойчивости. Для обеспечения запаса
устойчивости по фазе в пределах
![]() необходимо,
чтобы наклон асимптоты в окрестности
часто ты
необходимо,
чтобы наклон асимптоты в окрестности
часто ты
![]() был равен –20 дб/дек.
был равен –20 дб/дек.
Величина запаса
устойчивости по фазе
![]() вычисляется по формуле
вычисляется по формуле
![]()
Здесь суммирование
в первом случае осуществляется
по всем
сопрягающим частотам
![]() желаемой ЛАХ, при которых происходит
уменьшение её наклона на +20 дб/дек,
во втором случае
- по тем
частотам
желаемой ЛАХ, при которых происходит
уменьшение её наклона на +20 дб/дек,
во втором случае
- по тем
частотам
![]() ,
при которых происходит увеличение
наклона на –20 дб/дек.
,
при которых происходит увеличение
наклона на –20 дб/дек.
![]()
Так как
![]() больше 45 градусов, требуемых для системы,
то желаемая ЛАХ построена верно.
больше 45 градусов, требуемых для системы,
то желаемая ЛАХ построена верно.
Для получения ЛАХ параллельного корректирующего устройства необходимо построение «промежуточных» ЛАХ.
![]()
![]() ,
,
где L5 – ПФ гироскопа.
Определение структуры и параметров параллельного КУ.
![]()
![]()
![]()
![]()
При данных параметрах ПФ корректирующего устройства будет:
![]()