

курсовая работа / analiz_sistemy_sintez_korrektiruyushih_ustroystv_opredelenie / 2.3 Определение статических и динамических свойств скорректированной системы
.doc2.3 Определение статических и динамических свойств скорректированной системы

Рисунок 11
На рисунке 11 представлена структурная схема скорректированной последовательным КУ системы Wск(S). Используя Matlab 6.1, построим ЛАХ и ЛФХ системы.

Рисунок 12
Переходная характеристика (также используя Matlab 6.1):
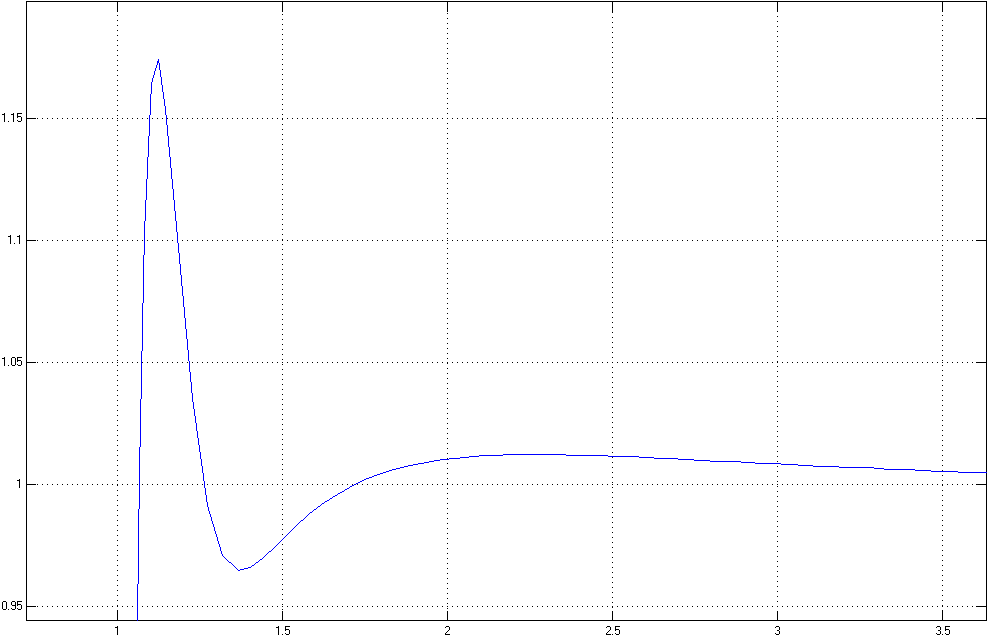
Рисунок 13
Переходная характеристика сходится в бесконечности в единице.
σ – величина перерегулирования.
![]()
Установившаяся ошибка равна нулю.
Время регулирования – наименьшее время, за которое кривая войдет в трубку точности
tрег = 1.217 сек
3. Общий вывод о работоспособности скорректированной системы
В результате выполнения курсовой работы мы синетезировали два корректирующих устройства – параллельное и последовательное.
Анализируя ЛФХ, видим, что запас устойчивости по фазе составляет 58 градусов. Переходный процесс сходится. Следовательно, можно говорить не только об устойчивости системы, но и о соответствии ее заданным требованиям качества.