

2.3. Дискретные модели непрерывных систем с импульсными элементами
Понятие дискретной модели импульсной
системы.Рассмотрим систему
автоматического управления, содержащую
один или несколько импульсных элементов.
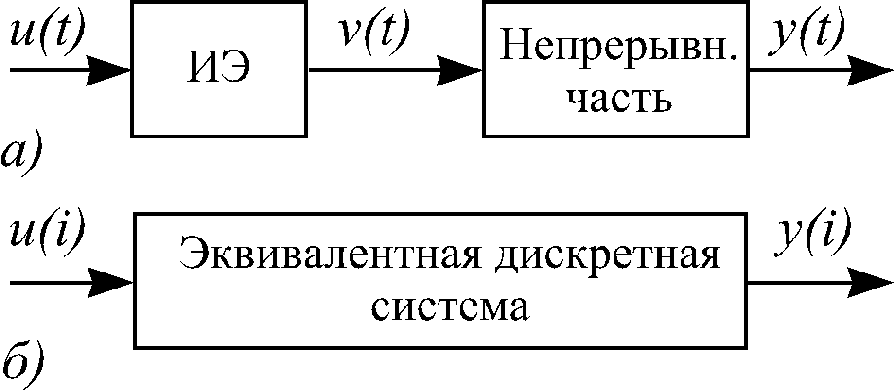
Тогда по числу этих элементов всю систему
можно разбить на пары – импульсный
элемент + непрерывная часть (рис.2.3,а).
Импульсный элемент (ИЭ) преобразует
непрерывный процесс![]() на его входе в последовательность
импульсов
на его входе в последовательность
импульсов![]() ,
следующих с одинаковым шагом
,
следующих с одинаковым шагом![]() ,
передавая информацию о непрерывном
процессе
,
передавая информацию о непрерывном
процессе![]() либо в высоте (АИМ), либо в ширине (ШИМ)
этих импульсов. Таким образом, входной
непрерывный сигнал
либо в высоте (АИМ), либо в ширине (ШИМ)
этих импульсов. Таким образом, входной
непрерывный сигнал![]() квантуется в моменты
квантуется в моменты![]() ,
и следовательно, для него можно построить
соответствующую решётчатую функцию
,
и следовательно, для него можно построить
соответствующую решётчатую функцию![]() .
.
Пусть выходной сигнал непрерывной части
![]() также квантуется (например, с помощью
последующих импульсных элементов) в те
же моменты времени
также квантуется (например, с помощью
последующих импульсных элементов) в те
же моменты времени![]() .
Тогда для этого сигнала также можно
построить решётчатую функцию
.
Тогда для этого сигнала также можно
построить решётчатую функцию![]() .
Очевидно, что при указанных условиях
для описания процессов протекающих в
данной системе целесообразно использовать
аппарат решётчатых функций, заменив
непрерывную часть системы с импульсным
элементом на входе некоторой эквивалентной
дискретной системой (рис.2.3, б), на входе
и выходе которой определены соответствующие
решётчатые функции
.
Очевидно, что при указанных условиях
для описания процессов протекающих в
данной системе целесообразно использовать
аппарат решётчатых функций, заменив
непрерывную часть системы с импульсным
элементом на входе некоторой эквивалентной
дискретной системой (рис.2.3, б), на входе
и выходе которой определены соответствующие
решётчатые функции![]() и
и![]() .
Модель этой дискретной системы
представляется разностными уравнениями.
Причём, эти уравнения должны быть такими,
чтобы при
.
Модель этой дискретной системы
представляется разностными уравнениями.
Причём, эти уравнения должны быть такими,
чтобы при![]() из их решений однозначно вытекало
из их решений однозначно вытекало![]() .
Более того, если
.
Более того, если![]() обозначает вектор состояний непрерывной
системы, то для соответствующей
эквивалентной дискретной системы вектор
состояний
обозначает вектор состояний непрерывной
системы, то для соответствующей
эквивалентной дискретной системы вектор
состояний![]() должен удовлетворять условию
должен удовлетворять условию![]() .
Данные разностные уравнения, представляющие
эквивалентную дискретную систему и
удовлетворяющие указанным условиям,
называются дискретной моделью непрерывной
системы с импульсным элементом (импульсной
системы).
.
Данные разностные уравнения, представляющие
эквивалентную дискретную систему и
удовлетворяющие указанным условиям,
называются дискретной моделью непрерывной
системы с импульсным элементом (импульсной
системы).
Рис.
2.3.
![]() и со скважностью
и со скважностью![]() (рис.1.2). Тогда, полагая для простоты
(рис.1.2). Тогда, полагая для простоты![]() ,
аналогично (1.2.3) запишем
,
аналогично (1.2.3) запишем
 (2.3.1)
(2.3.1)
где
![]() –одиночный
прямоугольный импульс единичной
амплитуды длительности
–одиночный
прямоугольный импульс единичной
амплитуды длительности![]() ,
действующий в момент
,
действующий в момент![]() .
.
Пусть непрерывная часть системы представляется линейными дифференциальными уравнениями в форме Коши
![]() (2.3.2)
(2.3.2)
где
![]() –матрицы
чисел соответствующих размеров. Причём
решение этих уравнений относительно
–матрицы
чисел соответствующих размеров. Причём
решение этих уравнений относительно![]() определяется формулой
определяется формулой
![]() . (2.3.3)
. (2.3.3)
Рассмотрим
![]() -ый
интервал дискретности
-ый
интервал дискретности![]() ,
который с учётом (2.3.1) можно разбить на
два подинтервала
,
который с учётом (2.3.1) можно разбить на
два подинтервала![]() и
и![]() .
На первом подинтервале на непрерывную
часть действует постоянный сигнал
.
На первом подинтервале на непрерывную
часть действует постоянный сигнал![]() ,
а на втором
,
а на втором![]() .
Тогда, если принять
.
Тогда, если принять![]() ,
то в соответствии с (2.3.3) состояние
непрерывной части в конце интервала,
то есть при
,
то в соответствии с (2.3.3) состояние
непрерывной части в конце интервала,
то есть при![]() ,
определится выражением
,
определится выражением
 . (2.3.4)
. (2.3.4)
Преобразуем второе слагаемое правой
части, используя замену
![]() .
Тогда, если учесть, что при
.
Тогда, если учесть, что при![]()
![]() ,
а при
,
а при![]() ,
и кроме того,
,
и кроме того,![]() ,
то (2.3.4) можно переписать в виде
,
то (2.3.4) можно переписать в виде
 . (2.3.5)
. (2.3.5)
Обозначим
![]() . (2.3.6)
. (2.3.6)
Тогда, переходя в (2.3.5) к решётчатым
функциям и учитывая, что квантование
выходного сигнала
![]() производится в те же моменты времени,
окончательно получим дискретную модель
импульсной системы с АИМ
производится в те же моменты времени,
окончательно получим дискретную модель
импульсной системы с АИМ
![]() (2.3.7)
(2.3.7)
где
![]() – та же, что и в (2.3.2), а матрицы
– та же, что и в (2.3.2), а матрицы![]() и
и![]() определяются соотношениями (2.3.6).
определяются соотношениями (2.3.6).
Аналогично может быть определена дискретная модель импульсной системы с АИМ, реализуемой с помощью непрямоугольных импульсов.
Дискретная модель импульсной системы
с ШИМ.Пусть импульсный элемент на
входе непрерывной части (рис.2.3, а)
реализует широтно-импульсную модуляцию.
Для определённости положим, что имеет
место ШИМ с помощью разнополярных
прямоугольных импульсов (рис.1.3, б),
следующих с периодом![]() и имеющих скважность положительных
импульсов, определяемую соотношением
и имеющих скважность положительных
импульсов, определяемую соотношением
![]() , (2.3.8)
, (2.3.8)
где
![]() –
коэффициент передачи импульсного
элемента;
–
коэффициент передачи импульсного
элемента;![]() –
квантованный в моменты
–
квантованный в моменты![]() входной сигнал импульсного элемента.
При этом для его выходного сигнала
входной сигнал импульсного элемента.
При этом для его выходного сигнала![]() аналогично (1.2.4) можно записать
аналогично (1.2.4) можно записать
 , (2.3.9)
, (2.3.9)
где
![]() –амплитуда
импульсов.
–амплитуда
импульсов.
Переходя к нахождению дискретной модели
данной импульсной системы, рассмотрим
![]() -ый
интервал дискретности, который в
соответствии с (2.3.9) можно разбить на
два подинтервала
-ый
интервал дискретности, который в
соответствии с (2.3.9) можно разбить на
два подинтервала![]() и
и![]() .
На первом подинтервале на непрерывную
часть (2.3.2) действует положительный
постоянный сигнал
.
На первом подинтервале на непрерывную
часть (2.3.2) действует положительный
постоянный сигнал![]() ,
а на втором – отрицательный, то есть
,
а на втором – отрицательный, то есть![]() .
Используя формулу Коши (2.3.3) найдём
состояние непрерывной части
.
Используя формулу Коши (2.3.3) найдём
состояние непрерывной части![]() в конце интервала по известному
состоянию
в конце интервала по известному
состоянию![]() в начале этого интервала. Учитывая
сделанные замечания, будем иметь
в начале этого интервала. Учитывая
сделанные замечания, будем иметь
 .
(2.3.10)
.
(2.3.10)
Преобразуем выражение в фигурных
скобках, используя для первого интеграла
замену
![]() ,
а для второго
,
а для второго![]() .
Тогда после перехода к решётчатым
функциям (2.3.10) принимает вид
.
Тогда после перехода к решётчатым
функциям (2.3.10) принимает вид
 . (2.3.11)
. (2.3.11)
В этом уравнении выражение в фигурных
скобках нелинейно зависит от скважности
![]() ,
которая в свою очередь, в соответствии
с (2.3.8), пропорциональна решётчатой
функции входа
,
которая в свою очередь, в соответствии
с (2.3.8), пропорциональна решётчатой
функции входа![]() .
Таким образом, если обозначить
.
Таким образом, если обозначить

и учесть, что квантование выхода
![]() осуществляется в те же моменты времени,
то окончательно дискретная модель
системы с ШИМ примет вид
осуществляется в те же моменты времени,
то окончательно дискретная модель
системы с ШИМ примет вид
![]() (2.3.12)
(2.3.12)
где
![]() – та же, что и в (2.3.2). Аналогично можно
получить дискретную модель импульсной
системы с ШИМ, реализуемой с помощью
непрямоугольных или с помощью полярных
импульсов (рис.1.3, а).
– та же, что и в (2.3.2). Аналогично можно
получить дискретную модель импульсной
системы с ШИМ, реализуемой с помощью
непрямоугольных или с помощью полярных
импульсов (рис.1.3, а).
Заметим, что несмотря на то, что непрерывная часть системы описывается линейными уравнениями, её дискретная модель оказалась нелинейной относительно входного воздействия.
Проведём линеаризацию (2.3.12) относительно
некоторого режима, определяемого входным
воздействием
![]() .
Пусть для определённости
.
Пусть для определённости![]() ,
тогда в соответствии с (2.3.8)
,
тогда в соответствии с (2.3.8)![]() ,
а
,
а![]() .
Разложим функцию
.
Разложим функцию![]() в ряд Тейлора в окрестности
в ряд Тейлора в окрестности![]() .
Формальное разложение этой функции
будет иметь вид
.
Формальное разложение этой функции
будет иметь вид
![]() , (2.3.13)
, (2.3.13)
где
![]() –это
члены разложения высших порядков
малости, а векторная величина
–это
члены разложения высших порядков
малости, а векторная величина![]() ,
которую будем обозначать как
,
которую будем обозначать как![]() ,
определится соотношением
,
определится соотношением
![]() . (2.3.14)
. (2.3.14)
Обозначим
![]() (2.3.15)
(2.3.15)
и найдём векторную функцию

Подставляя
![]() ,
получим для
,
получим для![]()
![]() . (2.3.16)
. (2.3.16)
Таким образом с учётом (2.3.15) нелинейная функция (2.3.13) может быть представлена в виде
![]() ,
,
где
![]() и
и![]() определяются формулами (2.3.14) и (2.3.16)
соответственно.
определяются формулами (2.3.14) и (2.3.16)
соответственно.
Если теперь отбросить члены разложения высших порядков малости, то окончательно линеаризованная дискретная модель импульсной системы с ШИМ принимает вид
![]() (2.3.17)
(2.3.17)
Эта модель устанавливает, в частности,
одну особенность импульсных систем с
ШИМ, которая заключается в том, что даже
при отсутствии входного воздействия
(![]() ),
установившаяся решётчатая функция
выхода
),
установившаяся решётчатая функция
выхода![]() будет отличной от нуля. Формально это
объясняется наличием в первом уравнении
(2.3.17) постоянного вектора
будет отличной от нуля. Формально это
объясняется наличием в первом уравнении
(2.3.17) постоянного вектора![]() ,
играющего роль внешнего возмущения.
Физически этот эффект можно объяснить
на следующем простом примере.
,
играющего роль внешнего возмущения.
Физически этот эффект можно объяснить
на следующем простом примере.
Пусть непрерывная часть системы описывается дифференциальным уравнением первого порядка
![]() ,
,
где
![]() –постоянная
времени, которую будем считать соизмеримой
с периодом дискретности
–постоянная
времени, которую будем считать соизмеримой
с периодом дискретности![]() .
Тогда при
.
Тогда при![]() сигнал
сигнал![]() на выходе импульсного элемента (на входе
непрерывной части) будет представляться
последовательностью разнополярных
прямоугольных импульсов длительности
на выходе импульсного элемента (на входе
непрерывной части) будет представляться
последовательностью разнополярных
прямоугольных импульсов длительности![]() ,
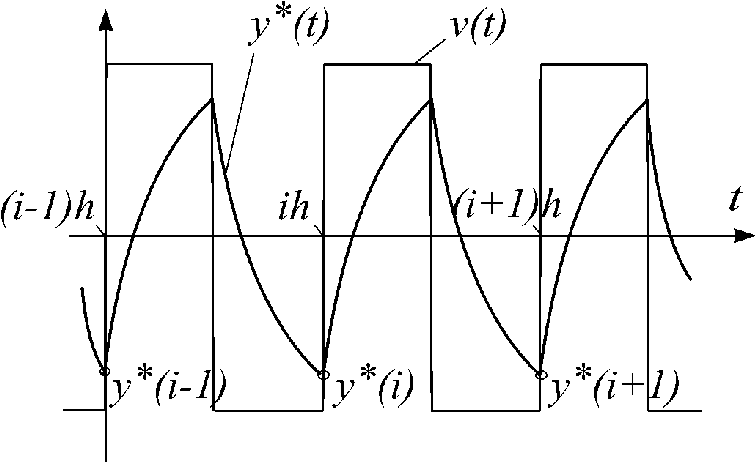
а установившаяся реакция непрерывной
части на такое воздействие представится
периодической функцией
,
а установившаяся реакция непрерывной
части на такое воздействие представится
периодической функцией![]() с нулевым средним и состоящей из кусков
экспонент (рис.2.4). Квантование этой
функции в моменты
с нулевым средним и состоящей из кусков
экспонент (рис.2.4). Квантование этой
функции в моменты![]() даёт решётчатую функцию
даёт решётчатую функцию![]() ,
которая оказывается отличной от нуля.
,
которая оказывается отличной от нуля.
Рис.
2.4.
![]() ,
если
,
если![]() ,
то есть, при достаточно большой частоте
квантования отрицательные эффекты,
связанные с применением ШИМ исчезают.
В связи с этим в практических задачах
широтно-импульсную модуляцию всегда
реализуют с высокой частотой, когда
период дискретности
,
то есть, при достаточно большой частоте
квантования отрицательные эффекты,
связанные с применением ШИМ исчезают.
В связи с этим в практических задачах
широтно-импульсную модуляцию всегда
реализуют с высокой частотой, когда
период дискретности![]() оказывается значительно меньше (на
несколько порядков) постоянных времени
непрерывной части. В этом случае
непрерывная часть реагирует на среднее
значение импульсного сигнала
оказывается значительно меньше (на
несколько порядков) постоянных времени
непрерывной части. В этом случае
непрерывная часть реагирует на среднее
значение импульсного сигнала![]() ,
которое при
,
которое при![]() становится непрерывной функцией, и
эффект квантования по времени пропадает.
Этим же объясняется и тот факт, что при
использовании ШИМ с высокой частотой
систему считают непрерывной и дискретную
модель этой системы не используют.
становится непрерывной функцией, и
эффект квантования по времени пропадает.
Этим же объясняется и тот факт, что при
использовании ШИМ с высокой частотой
систему считают непрерывной и дискретную
модель этой системы не используют.