

Глава 2.Математические модели и анализ дискретных систем во временной области
2.1. Решетчатые функции и разностные уравнения
Элементарные понятия теории решетчатых
функций.Наряду с непрерывными
функциями![]() ,
определёнными на всей вещественной
прямой
,
определёнными на всей вещественной
прямой![]() ,
в теории дискретных систем рассматривают
функции, которые определены только в
некоторых точках
,
в теории дискретных систем рассматривают
функции, которые определены только в
некоторых точках![]() .
Такие функции называют решетчатыми. В
дальнейшем будем рассматривать только
такие решётчатые функции, которые
определены в равноотстоящих точках
.
Такие функции называют решетчатыми. В
дальнейшем будем рассматривать только
такие решётчатые функции, которые
определены в равноотстоящих точках![]() ,
где
,
где![]() –любое
целое число, а
–любое
целое число, а![]() –период
дискретности. Эти функции имеют своим
аргументом дискретное время
–период
дискретности. Эти функции имеют своим
аргументом дискретное время![]() ,
поэтому их принято обозначать как
,
поэтому их принято обозначать как![]() .
.
Рис. 2.1.

![]() можно поставить в соответствие некоторую
решётчатую функцию
можно поставить в соответствие некоторую
решётчатую функцию![]() (рис.2.1, а, б), которая может быть получена
из непрерывной функции путём её
квантования по времени в моменты
(рис.2.1, а, б), которая может быть получена
из непрерывной функции путём её
квантования по времени в моменты![]() ,
то есть
,
то есть![]() .
Очевидно, что обратное утверждение
является неверным, так как для одной и
той же решётчатой функции
.
Очевидно, что обратное утверждение
является неверным, так как для одной и
той же решётчатой функции![]() можно поставить в соответствие
бесчисленное множество непрерывных
функций
можно поставить в соответствие
бесчисленное множество непрерывных
функций![]() ,
совпадающих в моменты
,
совпадающих в моменты![]() со значениями решётчатой функции.
со значениями решётчатой функции.
Отметим, что для непрерывной функции
![]() можно получить множество решётчатых
функций, если рассматривать непрерывную
функцию в моменты
можно получить множество решётчатых
функций, если рассматривать непрерывную
функцию в моменты![]() .
При этом для каждого фиксированного
значения
.
При этом для каждого фиксированного
значения![]() мы будем иметь решётчатую функцию
мы будем иметь решётчатую функцию![]() ,
которая определена в точках
,
которая определена в точках![]() (рис.2.1, в). Такие функции называются
смещёнными решётчатыми функциями.
Аргументами этих функций являются
дискретное время
(рис.2.1, в). Такие функции называются
смещёнными решётчатыми функциями.
Аргументами этих функций являются
дискретное время![]() и параметр
и параметр![]() .
Поэтому их принято обозначать как
.
Поэтому их принято обозначать как![]() .
.
По аналогии с непрерывными функциями,
для которых определены понятия
производных, для решётчатых функций
вводятся понятия конечных разностей.
Конечной разностью первого порядка
(или для краткости – первой разностью)
решётчатой функции![]() называется решётчатая функция
называется решётчатая функция![]() ,
определяемая выражением
,
определяемая выражением
![]() . (2.1.1)
. (2.1.1)
Аналогично вводятся понятия конечных
разностей более высоких порядков. В
частности, конечная разность
![]() -го
порядка (
-го
порядка (![]() -я
разность) определяется как
-я
разность) определяется как
![]() . (2.1.2)
. (2.1.2)
При этом нулевая разность – это сама
решётчатая функция ![]() .
.
Разность любого порядка можно выразить
через значения решётчатой функции
![]() .
В частности, для второй разности с учётом
(2.1.1) получим
.
В частности, для второй разности с учётом
(2.1.1) получим
![]() .
.
В общем случае, конечную разность
![]() -го
порядка можно выразить через значения
решётчатой функции для моментов
-го
порядка можно выразить через значения
решётчатой функции для моментов![]() .
.
Отметим, что вычисление конечных разностей является линейной операцией. Это вытекает непосредственно из определения конечной разности. В частности, например, для первой разности можно записать
![]() ,
,
где
![]() –некоторые
постоянные.
–некоторые
постоянные.
Аналогом интеграла в теории решётчатых
функций выступает понятие суммы. Суммой
решётчатой функции
![]() называется некоторая решётчатая функция
называется некоторая решётчатая функция![]() ,
определяемая выражением
,
определяемая выражением
![]() , (2.1.3)
, (2.1.3)
и для которой
![]() является первой разностью, то есть
является первой разностью, то есть
![]() . (2.1.4)
. (2.1.4)
По аналогии с теорией непрерывных
функций, решётчатую функцию
![]() ,
определяемую условиями (2.1.3), (2.1.4),
называют первообразной для решётчатой
функции
,
определяемую условиями (2.1.3), (2.1.4),
называют первообразной для решётчатой
функции![]() .
.
Отметим, что если решётчатая функция
![]() определена при всех целочисленных
значениях аргумента
определена при всех целочисленных
значениях аргумента![]() ,
то для определения первообразной
необходимо дополнительно потребовать,
чтобы при каждом конечном
,
то для определения первообразной
необходимо дополнительно потребовать,
чтобы при каждом конечном![]() сходился ряд
сходился ряд![]() .
При этом условии первообразная
определяется выражением
.
При этом условии первообразная
определяется выражением
![]() . (2.1.5)
. (2.1.5)
Нетрудно показать, что если
![]() является первообразной для
является первообразной для![]() ,
то для любого постоянного
,
то для любого постоянного![]() функция
функция![]() также является первообразной для
решётчатой функции
также является первообразной для
решётчатой функции![]() .
Действительно,
.
Действительно,
![]() .
.
Таким образом, общий вид первообразной
для решётчатой функции
![]() определяется формулой
определяется формулой
![]() . (2.1.6)
. (2.1.6)
Значение постоянной
![]() можно выразить через значение
можно выразить через значение![]() при некотором фиксированном значении
аргумента
при некотором фиксированном значении
аргумента![]() ,
то есть
,
то есть
![]() .
.
Подставляя это выражение в формулу (2.1.6), получим
 ,
,
откуда для любого
![]()
![]() . (2.1.7)
. (2.1.7)
Эта формула является аналогом формулы Ньютона-Лейбница, связывающей интеграл с первообразной. Основываясь на формуле (2.1.7) можно, в частности, показать [4], что для решётчатых функций справедлива формула суммирования по частям, аналогичная формуле интегрирования по частям для обычных функций.
Разностные уравнения как модели
дискретных систем.Всякое соотношение,
связывающее решётчатую функцию и её
конечные разности, называется разностным
уравнением. Подобные уравнения являются
аналогом дифференциальных уравнений
в теории обычных (непрерывных)
функций и также, как и в непрерывных
системах, используются для моделирования
дискретных динамических процессов. При
этом наиболее распространёнными формами
представления дискретных систем являются
форма Коши и форма "вход-выход".
Так, например, если некоторая дискретная
система имеет векторный вход![]() и векторный выход
и векторный выход![]() ,
то в форме Коши эта система представляется
следующими разностными уравнениями
,
то в форме Коши эта система представляется
следующими разностными уравнениями
![]() (2.1.8)
(2.1.8)
где
![]() –вектор
дискретных состояний этой системы, а
–вектор
дискретных состояний этой системы, а![]() и
и![]() –в
общем случае нелинейные векторные
функции.
–в
общем случае нелинейные векторные
функции.
В форме "вход-выход" такая система в общем виде запишется следующим образом
![]() , (2.1.9)
, (2.1.9)
где параметр
![]() ,
определяющий порядок старшей разности
выхода
,
определяющий порядок старшей разности
выхода![]() ,
называется порядком разностного
уравнения;
,
называется порядком разностного
уравнения;![]() –в
общем случае нелинейная
–в
общем случае нелинейная![]() -мерная
векторная функция.
-мерная
векторная функция.
Отметим, что поскольку конечные разности
любого порядка можно выразить через
значения решётчатой функции, то обычно
разностные уравнения записывают не
относительно конечных разностей, а по
отношению к значениям решётчатых
функций, сдвинутых на определённое
число тактов. Так, например, если
ограничиться рассмотрением линейных
дискретных систем (в этом случае функции
![]() ,
,![]() и
и![]() являются линейными), то разностные
уравнения в форме Коши (2.1.8) можно
представить в виде
являются линейными), то разностные
уравнения в форме Коши (2.1.8) можно
представить в виде
![]() (2.1.10)
(2.1.10)
а представление этой системы в форме "вход-выход" запишется следующим образом
![]() ,
,![]() . (2.1.11)
. (2.1.11)
В уравнениях (2.1.10) и (2.1.11)
![]() ,
,![]() ,
,![]() ,
,![]() и
и![]()
![]() ,
,![]()
![]() обозначают матрицы соответствующих
размеров. Причём, если система стационарная,
то элементами этих матриц являются
числа, а в нестационарном случае –
решётчатые функции.
обозначают матрицы соответствующих
размеров. Причём, если система стационарная,
то элементами этих матриц являются
числа, а в нестационарном случае –
решётчатые функции.
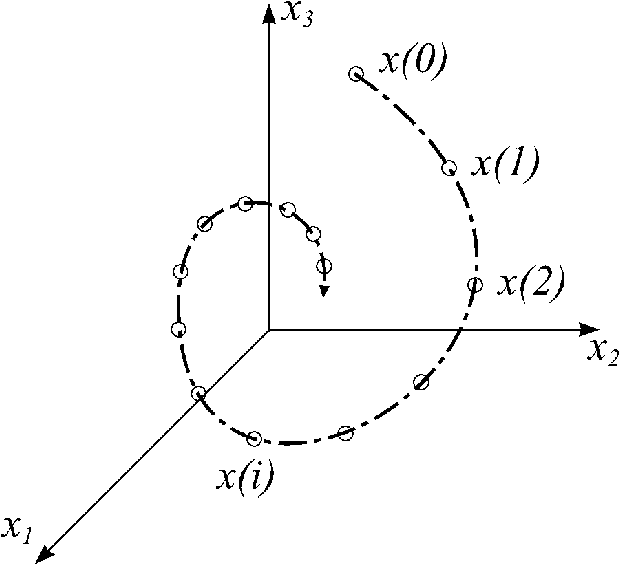
Рис. 2.2.
![]() и
и![]() в (2.1.11) в общем случае могут и не совпадать
с числом выходных переменных
в (2.1.11) в общем случае могут и не совпадать
с числом выходных переменных![]() .
Однако в практических задачах такие
системы встречаются весьма редко.
Поэтому в дальнейшем будем считать, что
число строк в матрицах
.
Однако в практических задачах такие
системы встречаются весьма редко.
Поэтому в дальнейшем будем считать, что
число строк в матрицах![]() и
и![]() равно
равно![]() ,
и таким образом, матрицы
,
и таким образом, матрицы![]() являются квадратными
являются квадратными![]() .
Отметим также, что разностные уравнения
(2.1.10), представляющие дискретную систему
в форме Коши, иногда определяют как
уравнение состояний (первое из уравнений
(2.1.10)) и уравнение выхода (второе уравнение
из (2.1.10)). При этом смысл названия
«уравнение состояний» заключается в
том, что решение этого уравнения,
определённое для некоторого вектора
начальных состояний
.
Отметим также, что разностные уравнения
(2.1.10), представляющие дискретную систему
в форме Коши, иногда определяют как
уравнение состояний (первое из уравнений
(2.1.10)) и уравнение выхода (второе уравнение
из (2.1.10)). При этом смысл названия
«уравнение состояний» заключается в
том, что решение этого уравнения,
определённое для некоторого вектора
начальных состояний![]() ,
позволяет получить последовательность
дискретных состояний
,
позволяет получить последовательность
дискретных состояний![]() и представить поведение данной системы
в пространстве этих состояний (рис.2.2 –
для системы 3-го порядка).
и представить поведение данной системы
в пространстве этих состояний (рис.2.2 –
для системы 3-го порядка).
При записи дискретных систем в форме
"вход-выход" часто используется
операторное представление с применением
оператора прямого
![]() или обратного
или обратного![]() сдвига, которые определяются соотношениями
сдвига, которые определяются соотношениями
![]() (2.1.12)
(2.1.12)
где
![]() –некоторая
решётчатая функция, а
–некоторая
решётчатая функция, а![]() –любое
положительное целое. Так, например, с
применением оператора прямого сдвига
уравнение (2.1.11) можно записать в виде
–любое
положительное целое. Так, например, с
применением оператора прямого сдвига
уравнение (2.1.11) можно записать в виде
![]()
или, если использовать понятие операторных полиномиальных матриц
![]() ,
,![]() ,
,
то (2.1.11) запишется в более компактной форме
![]() . (2.1.13)
. (2.1.13)
Операторное представление (2.1.13) позволяет формально выразить выход дискретной системы через её вход
![]() ,
,
что приводит к понятию операторной передаточной матрицы дискретной системы
![]() . (2.1.14)
. (2.1.14)
Аналогичным образом, при использовании оператора обратного сдвига, уравнение (2.1.11) можно представить в виде
![]() , (2.1.15)
, (2.1.15)
где полиномиальные матрицы
![]() и
и![]() определяются соотношениями
определяются соотношениями
![]() ,
,![]() .
.
В справедливости этих формул легко
убедиться, если в уравнении (2.1.11) перейти
к новому дискретному времени
![]() .
При этом
.
При этом
![]() ,
,![]() .
.
Одной из важнейших характеристик
разностного уравнения и соответствующей
ему дискретной системы является
характеристический полином
![]() ,
который, если система представлена в
форме Коши (2.1.10), вычисляется по формуле
,
который, если система представлена в
форме Коши (2.1.10), вычисляется по формуле
![]() , (2.1.16)
, (2.1.16)
где
![]() –числовые
коэффициенты, а
–числовые
коэффициенты, а![]() –здесь
и далее обозначает единичную матрицу
соответствующих размеров. Для формы
"вход-выход" (2.1.13) характеристический
полином определится соотношением
–здесь
и далее обозначает единичную матрицу
соответствующих размеров. Для формы
"вход-выход" (2.1.13) характеристический
полином определится соотношением
![]() . (2.1.17)
. (2.1.17)
Отсюда в частности следует, что если
система имеет скалярный выход ![]() ,
то матричный полином
,
то матричный полином![]() в уравнении (2.1.13), который теперь
становится скалярным, будет совпадать
с характеристическим полиномом системы.
в уравнении (2.1.13), который теперь
становится скалярным, будет совпадать
с характеристическим полиномом системы.