

Глава 2. Цифровые развязывающие устройства
Для разделения направлений передачи и приема существуют дифференциальные системы. Они могут быть реализованы либо на резисторах (рис.2.1.б), либо на трансформаторах (рис.2.1а). В этих дифференциальных системах используется принцип моста. Когда мост сбалансирован (продольные плечи моста подобны), сигналы передатчика не проникают в приемник и в идеальном случае происходит развязка направлений передачи и приема.
В трансформаторной дифференциальной системе используется тот же принцип моста:
W1 и ZЛ – одно плечо моста;
W2 и ZБ – другое продольное плечо моста;
Впервые дифференциальная система на трансформаторах была предложена в 1908 г. русским ученым Коваленковым. В случае, если
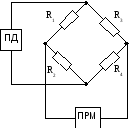

Рисунок 2.1.а Рисунок 2.1.б
а1-4=а1-2=3 дБ
Условие
баланса моста: ![]()
![]()
ПД –передатчик;
ПРМ – приемник;
ZЛ – сопротивление линии связи.
балансное сопротивление (ZБ) точно совпадает с параметрами линии связи, то в этом случае наблюдается максимальное затухание в направлении а4-2. Однако реально линия – распределенная система, поэтому изначально нельзя точно сбалансировать дифференциальную систему. В результате этого наблюдается появление эхо-сигналов.
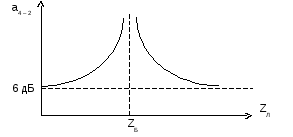
Если эхо-сигналы приходят с небольшой задержкой (менее 10 мс), то такие помехи ухом не воспринимаются. Однако, если сигналы передаются по спутниковым каналам, то задержка может быть до 500 мс и более, что приводит к срыву передаваемого сообщения. Из-за конечного значения переходного затухания а4 – 2 появляется дополнительная неравномерность амплитудно-частотных искажений как в тракте передачи, так и в тракте приема, даже если АЧХ каждого направления идеальна. В среднем величина затухания а4-2=10 дБ.
Развитие микроэлектроники и методов адаптивной фильтрации привели к поиску новых алгоритмов разделения направлений передачи и приема.
2.1. Абсолютный компенсационый метод (акм)
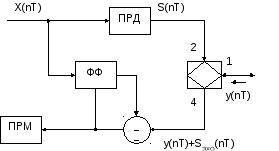
ФФ – формирующий фильтр;
g42(nT) – импульсная реакция эхо-тракта;
SЭХО(nT)=x(nT)*g42(nT) – отсчеты эхо-сигнала.
Принцип работы.
Сигнал
x(nT)
поступает одновременно на передатчик
и на формирующий фильтр. Задача
формирующего фильтра – сформировать
паразитный сигнал (оценку выходного
сигнала), который являлся бы точной
копией эхо-сигнала:
![]() .
Формирующий фильтр производит операцию
свертки передаваемого сигнала x(nT)
с заранее снятой импульсной реакцией
.
Формирующий фильтр производит операцию
свертки передаваемого сигнала x(nT)
с заранее снятой импульсной реакцией
![]() .
.
![]() либо
снимается заранее, либо с помощью
градиентных методов сводится к минимуму
среднеквадратической ошибки.
либо
снимается заранее, либо с помощью
градиентных методов сводится к минимуму
среднеквадратической ошибки.
Эхо-сигнал компенсируется в вычитателе. На выходе вычитателя будет:
LПРИН.(nT)=
x(nT)*g42(nT)+y(nT)
-
![]() y(nT).
y(nT).
Таким образом для борьбы с помехой была использована искусственно выработанная помеха, которая в идеальном случае точно повторяет реальную помеху и компенсирует ее с большой точностью.
Преимущества системы разделения направлений передачи и приема на основе АКМ:
-
Адаптивность (происходит адаптация системы под параметры канала связи).
-
Возможна микроминиатюризация устройства в связи с развитием цифровой техники.
-
Величина переходного затухания между трактами передачи и приема достигает 40 дБ, а значит данную систему можно использовать в спутниковых системах связи.
Недостатки:
-
Сложность реализации операции свертки формирующим фильтром в реальном масштабе времени из-за большого количества операций умножения.
-
Достаточно большой уровень собственного шума. Это приводит к невозможности подстройки алгоритма при соизмеримости уровня шума канала связи с собственным шумом формирующего фильтра.
-
Невозможность подстройки параметров формирующего фильтра при наличии принимаемого сигнала.