

1. Перевернутый маятник на каретке как объект управления
1.1 Описание объекта
Θ
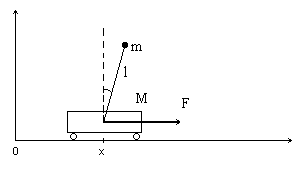
Рис 1.1
Принципиальная схема объекта управления.
На рис 1.1 представлен механический
объект – маятник длины
![]() =1м
с сосредоточенной массой m=1кг, отклоненный
от положения равновесия на угол Θ=1рад,
на движущейся под действием силы F
каретке массой M=0.1кг, перемещенной от
начала координат на x=1м.
=1м
с сосредоточенной массой m=1кг, отклоненный
от положения равновесия на угол Θ=1рад,
на движущейся под действием силы F
каретке массой M=0.1кг, перемещенной от
начала координат на x=1м.
Угловая скорость маятника
![]() =0.1рад/с,
скорость каретки
=0.1рад/с,
скорость каретки![]() =0.1м/с.
=0.1м/с.
Данная система имеет две степени свободы:
- поступательное движение каретки
- вращательное движение маятника
1.2 Математические модели объекты управления
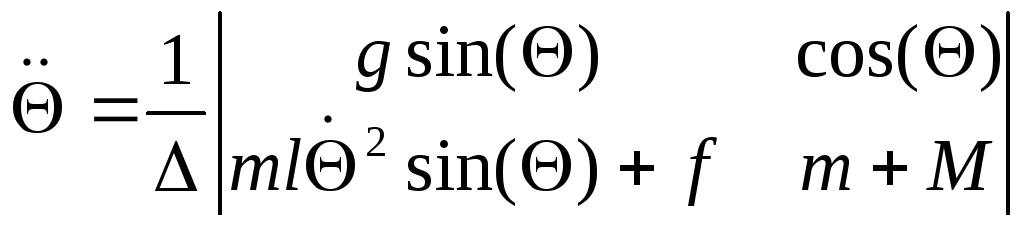
Упущение: Если принять сосредоточенность масс; отсутствие трения и сопротивления воздуха, то математическая модель объекта может быть представлена в форме системы из двух дифференциальных уравнений:
![]()
![]()
Первое уравнение отображает второй закон Ньютона для вращающихся масс
(g=9.81 м/с2);
Второе уравнение – торой закон Ньютона для поступательного движения.
Реализация моделей в среде программы MatLabSimulinkупрощается, если уравнение записывается в форме Коши:
- четыре уравнения первого порядка, разрешенного относительно производных.
Для этого исходное уравнение разрешаем относительно старших производных.
Можно заметить, что исходное уравнение
линейно, относительно
![]() и
и![]() :
:
Пусть будет матрица:

Уравнения имеют единственное решение, если определитель системы не равен 0:
Δ=l(m+M)-ml*cos2(Θ) ≠0;
Уравнения, разрешенные относительно старших производных примут вид:

1.2.1 Нелинейные дифференциальные уравнения
Уравнения в форме Коши запишутся так:
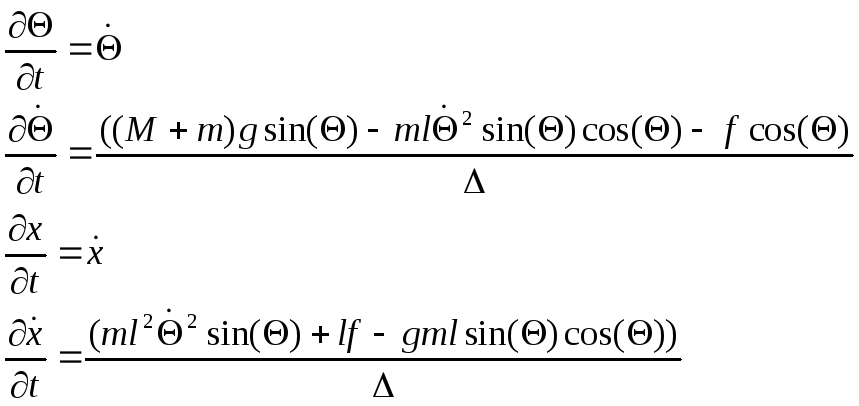
Уравнение дополняется начальными условиями.
1.2.2 Линеаризованные дифференциальные уравнение
Пусть просматриваются малые отклонения маятника от верхнего положения равновесия. При этом sin(Θ)≈Θ.
Мы заменим при этой линеаризации.
Рассмотрим малое отклонение маятника и малые угловые скорости.
![]()
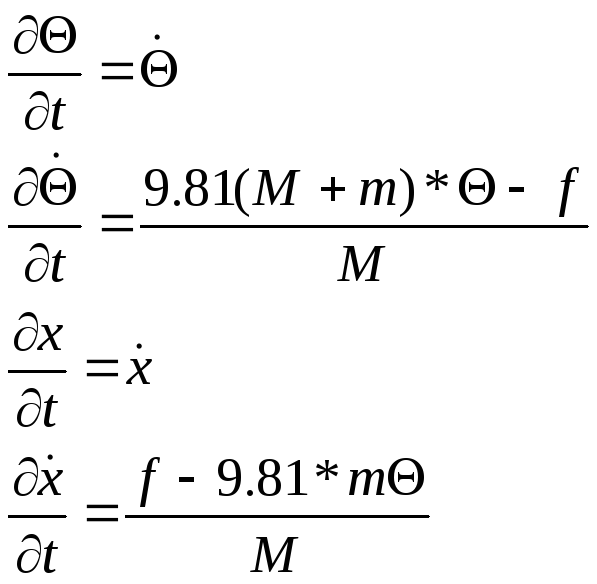
Линеаризованные уравнения примут вид
![]()
Данный вариант задания конкретизирует параметры.
2. Анализ объекта управления
2.1 Компьютерная имитация объекта управления
Структурное представление моделей на языке графического редактора MatLabSimulinkизображено на рис 2.1. Реализуется на интеграторах.

![]()
![]()
![]()
![]()
![]()
![]()
Рис 2.1
Модель объекта на языке MatLab Simulink
![]()
![]()
Inital condition:
Integrator: 0.1
Integrator1: 1
Integrator2: 0.1
Integrator3: 1
2.2 Линеаризация компьютерной модели
Линеаризация моделей осуществляется автоматически по команде linmod2.
Матрицы задают модель в форме пространства состояний следующего вида:
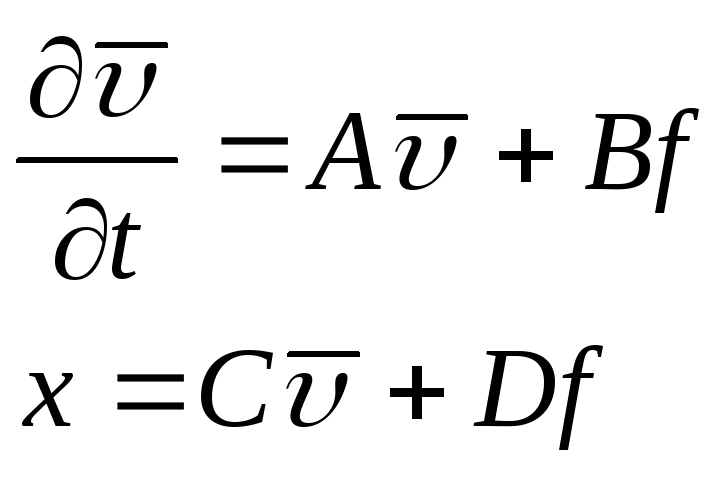
Аналитически с учетом принятых допущений см.1.2.2
Следовательно,

![]() -
вектор состояния;
-
вектор состояния;![]() R4
R4
Команда linmod2 выбирает
компоненты вектора состояния, не
обязательно совпадающие с физическими
переменными![]() ,
,![]() ,
,![]() ,
,![]()
По структуре матриц A,B,C,Dпостараемся установить соответствие между абстрактными и физическими переменными состояния
>>[A,B,C,D]=linmod2(‘kursovik’)
A =
0 0 0 1.0000
0 0 1.0000 0
0 107.9100 0 0
0 -98.1000 0 0
B =
0
0
-10.0000
10.0000
C =
1 0 0 0
D =
0
По виду матрицы С делаем заключение,
что x=u1;D=0;По
виду матрицAиBможно заключить:![]() =u4;
=u4;![]() ;
;
Линеаризованное уравнение объекта в скалярной форме имеют вид:
![]()
![]()
![]()
![]()