

3.5.2 Компьютерная имитация замкнутой системы
Подключаем линейный динамический регулятор к нелинейному объекту, как это покозано на рис 3.2
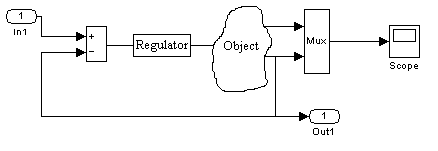
Рис 3.2
Структурная схема замкнутой системы
Целью имитационных исследований является оценка размеров области притяжения стабилизируемого положения равновесия.(При каких начальных отклонениях каретки маятник у нас вернется в состояние покоя.)
П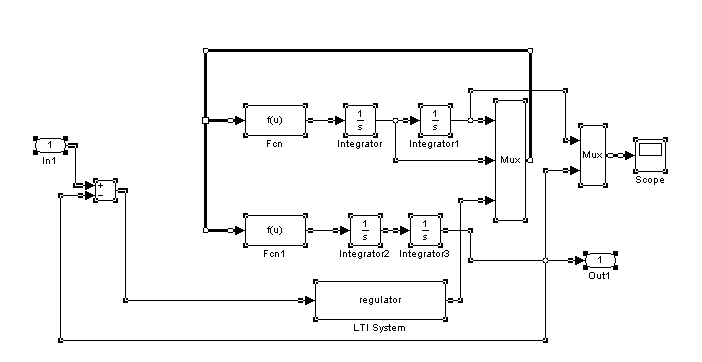 режде
всего убедимся в том, что положение
равновесия устойчиво в малом. Для этого
подвергнем линеаризации замкнутую
систему.
режде
всего убедимся в том, что положение
равновесия устойчиво в малом. Для этого
подвергнем линеаризации замкнутую
систему.
Рис 3.2
Принципиальная схема замкнутой модели системы
>> [Ac1,Bc1,Cc1,Dc1]=linmod2('kurs')
Ac1 =
1.0e+003 *
0 0 0 0 0 0 0 0.0010
0 0 0.0010 0 0 0 0 0
0 0.1079 0 -1.3148 -0.0991 0.0026 0.0001 0
-0.1280 0 0 -0.1100 -0.0363 0.0166 0.0078 0
0 0 0 0.1280 0 0 0 0
0 0 0 0 0.0320 0 0 0
0 0 0 0 0 0.0080 0 0
0 -0.0981 0 1.3148 0.0991 -0.0026 -0.0001 0
Bc1 =
0
0
0
128
0
0
0
0
Cc1 =
1 0 0 0 0 0 0 0
Dc1 =
0
Проверим устойчивость, т.е вычислим собственные значения.
>> eig(Ac1)
ans =
-40.0000
-30.0000
-20.0000
-10.0000
-4.0000
-3.0000
-2.0000
-1.0000
Линеаризованная система устойчива,
имеет желаемые собственные знпчения,
что свидетельствует о существовании
области устойчивости в малом (малой
области устойчивости). Для оценки области
притяжения проведем серию имитационных
исследований, назначая различные
начальные условия
![]() ,
,![]() ;
;
Получены следующие значения:
![]() ;
;
![]() ;
;
4. Синтез дискретного регулятора
4.1 Способы синтеза
Можно выделить два способа синтеза дискретного регулятора, стабилизирующего непрерывный объект:
1 – дискретизация непрерывного регулятора;
2 – синтез дискретного регулятора на базе дискретной модели объекта;
На рис 4.1 иллюстрируются оба способа.
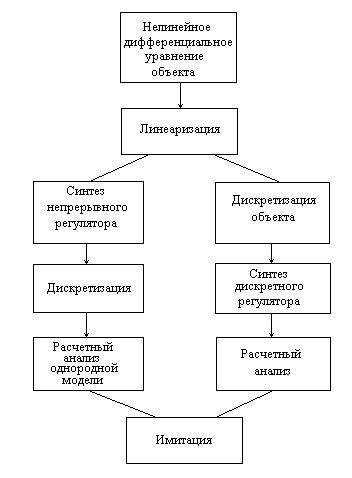
Рис 4.1
Способы синтеза дискретного регулятора
примечание: Имитация возможна только при существовании области устойчивости дискретной системы.
4.2 Дискретизация непрерывного регулятора
Основным вопросом при дискретизации непрерывного регулятора является выбор периода дискретизации Т. Имеются противоречивые требования – слишком малые значенияТусложняют техническую реализацию, а слишком большие – приводят к недопустимой потере информации, в результате чего замкнутая система может стать неустойчивой.
Период дискретизации Твыбирается «экспериментально», для выбора начального приближения можно воспользоваться теоремой Котельникова – Шеннона, которая утверждает, что частота дискретизации должна быть более чем в два раза выше максимальной частоты в спектре сигнала.
Спектр сигналов (распределение энергии по частотам) циркулирующих в контуре регулирования и в контуре наблюдающего устройства, определяются собственными значениями, которые были назначены при синтезе.
Положим, что максимальная частота в спектре сигналов в пять раз выше максимального модуля собственных значений (р)
wmax=5|pi|;
В нашем случае |pi| = 40c-1;
Значит,wmax = 5*40 = 200c-1;
Приближенное значение периода дискретизации находится так: wT>2 wmax; wT>400c-1
wT=
![]() >400c-1;T<0.0157; Т≈0.015;
>400c-1;T<0.0157; Т≈0.015;
Проведем дискретизацию полученного ранее непрерывного регулятора по команде:
>>[Ard,Brd,Crd,Drd]=c2dm(Ar,Br,Cr,Dr,0.015)
Ard =
0.1023 0.0031 0.0010 0.0072
4.6869 1.0075 0.0170 0.0454
37.6796 -0.4188 0.8203 0.3412
-17.8233 0.6164 0.1969 0.8588
Brd =
0.8979
-4.6866
-37.7082
17.8544
Crd =
-0.2446 -14.5356 -1.5097 -0.5097
Drd =
0
Проведем расчетный анализ системы с дискретным регулятором. Расчетные методы имеются только для однородных объектов, поэтому подвергнем дискретизации и объект:
>> [Ad,Bd,Cd,Dd]=c2dm(A,B,C,D,0.015)
Ad =
1.0000 -0.0111 -0.0001 0.0150
0 1.0122 0.0151 0
0 1.6252 1.0122 0
0 -1.4775 -0.0111 1.0000
Bd =
0.0011
-0.0011
-0.1506
0.1506
Cd =
1 0 0 0
Dd =
0

Рис 4.2
Структурная схема дискретной модели замкнутой системы
Получим матрицы замкнутой системы:
>> [Acd,Bcd,Ccd,Dcd]=feedback(Ad,Bd,Cd,Dd,Ard,Brd,Crd,Drd)
Acd =
1.0000 -0.0111 -0.0001 0.0150 0.0003 0.0164 0.0017 0.0006
0 1.0122 0.0151 0 -0.0003 -0.0164 -0.0017 -0.0006
0 1.6252 1.0122 0 -0.0368 -2.1892 -0.2274 -0.0768
0 -1.4775 -0.0111 1.0000 0.0368 2.1884 0.2273 0.0767
0.8979 0 0 0 0.1023 0.0031 0.0010 0.0072
-4.6866 0 0 0 4.6869 1.0075 0.0170 0.0454
-37.7082 0 0 0 37.6796 -0.4188 0.8203 0.3412
17.8544 0 0 0 -17.8233 0.6164 0.1969 0.8588
Bcd =
0.0011
-0.0011
-0.1506
0.1506
0
0
0
0
Ccd =
1 0 0 0 0 0 0 0
Dcd =
0
>>eig(Acd)
ans =
0.1047
1.0174 + 0.3118i
1.0174 - 0.3118i
0.7603
0.9540
0.9618
0.9987 + 0.0134i
0.9987 - 0.0134i
>>abs(eig(Acd))
ans =
0.1047
1.0641
1.0641
0.7603
0.9540
0.9618
0.9988
0.9988
Причиной неустойчивости замкнутой дискретной системы может быть слишком большой период времени дискретизации. Чтобы проверить это предположение, повторим дискретизацию и анализ изменяя значения Т;
Вывод: Замкнутая линейная система при Т≈0.01 является устойчивой, что свидетельствует о существовании области притяжения положения равновесия.
Проведем имитационное исследование гибридной системы образованной нелинейным непрерывным объектом и линейным дискретным регулятором для оценки размеров области притяжения.
![]() ;
;
![]() ;
;
При уменьшении Т до 0.0001с не существует области устойчивости.
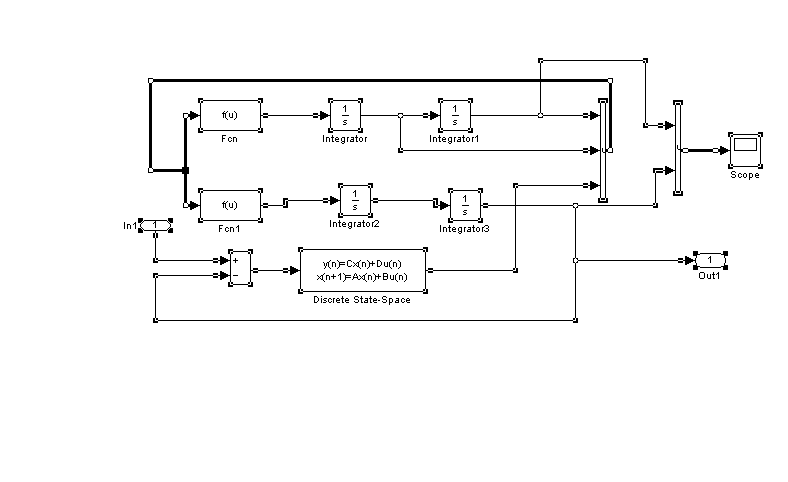
Рис 4.3
Принципиальная схема дискретной модели замкнутой системы
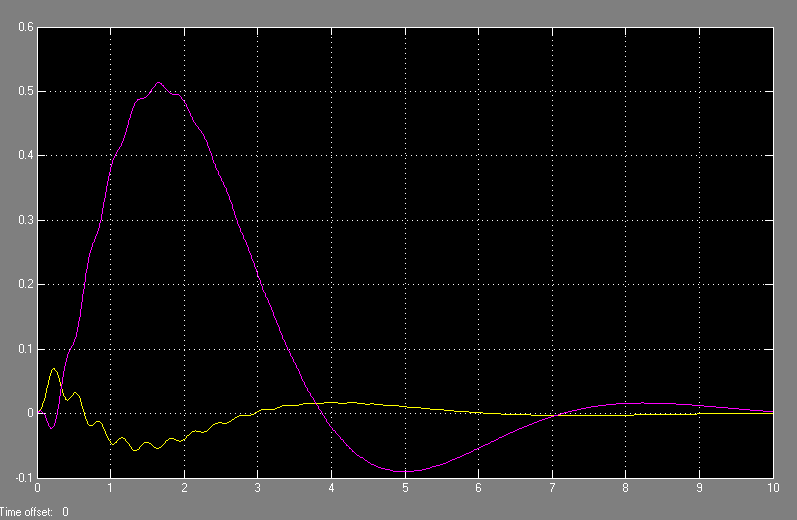
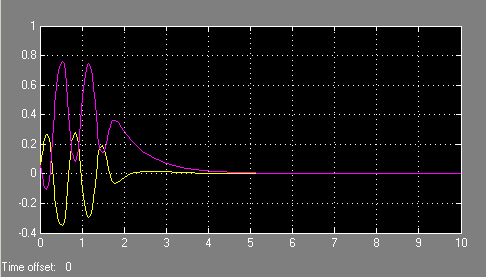
Рис 4.4
График переходных процессов замкнутой системы,
дискретизированой по времени Т=0.01 с