

При получении дополнительных условий
![]() max<=25-30%;
max<=25-30%;
tр<=0,2 с; определим частоты для построения желаемой ЛАХ:
ωe<ωср< ωк
По диаграмме Солодовникова определяем частоту среза wср
![]() =54,95;
lgwср=1.67
=54,95;
lgwср=1.67
40<54,95<400
ωк =Dω= 400 lgωк=2.6
ωе=![]() e
=
e
=
![]() =6,32
lgωе=
0.95
=6,32
lgωе=
0.95
0.95<1.67<2.6
Построим желаемую ЛАХ (Рис.2)

Рис.2 Построение желаемой ЛАХ
 Wк
=
Wк
=![]() =
=![]()
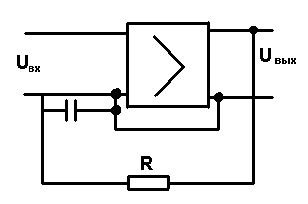
Построим ЛАХ корректирующего устройства
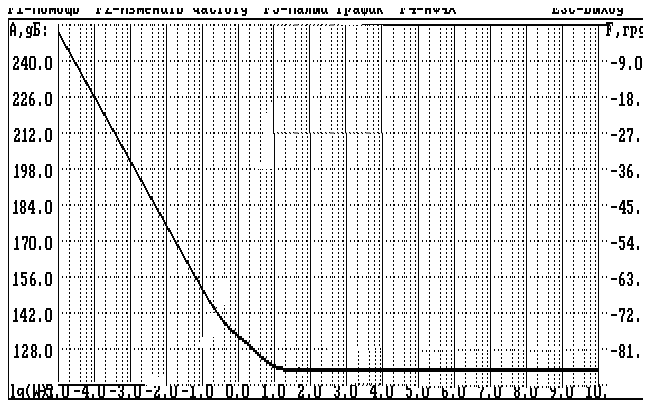
Рис.3 ЛАХ корректирующего устройства
 По
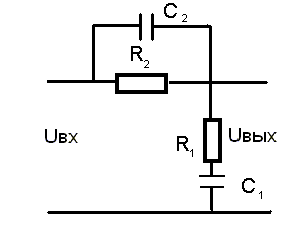
ЛАХ корректирующего устройства выбираем
схему корректирующего устройства.
По
ЛАХ корректирующего устройства выбираем
схему корректирующего устройства.
![]()
![]() ;
;
![]()
![]()
Произведем расчет элементов корректирующего устройства
1)
Т![]() =T
=T![]() =0,2
=0,2
T![]() =0,6
=0,6
T![]() =Т
=Т![]() =1
=1
Т![]() =Т
=Т![]() =0,002
=0,002
Пусть С![]() =10мкФ,
тогда
=10мкФ,
тогда
![]()
![]()
![]()
![]()
W(P)=![]()
T=RC
Пусть С=10Мкф, тогда
R=T/C=2,602/10=0.2602кОм
Построим переходный процесс синтезированной системы
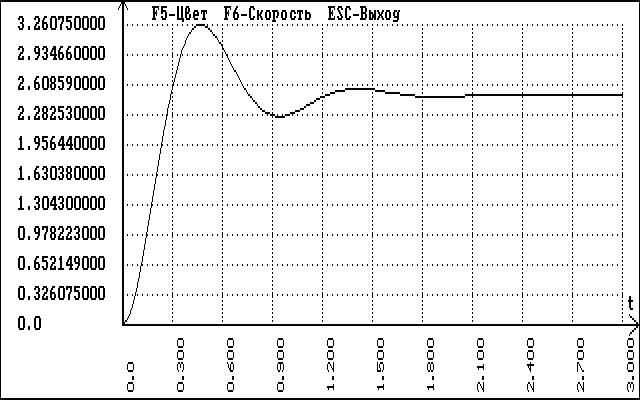
Рис.4 Переходный процесс синтезированной системы

Рис.5 Ошибка синтезированной системы
По графику (Рис.4) определим основные показатели качества.

1.Максимальное перерегулирование.
σ =(хmax-хвын)*100%/хвын=(3.26-2.28)*100%/50=1.96%.
2. Время регулирования.
tр=1,8с.
3.Число колебаний tk=1.
4. Собственная частота колебаний.
w=2П/tk=2*3.14/2=3.14.
5. Логарифмический декремент затухания.
d=ln(qi/qi+1)=ln(0.327/0.103)=1.155.
6. Максимальная скорость отработки сигнала.
[dx/dt]max=1,22
Построим ЛАХ и ЛФХ разомкнутой части синтезированной системы
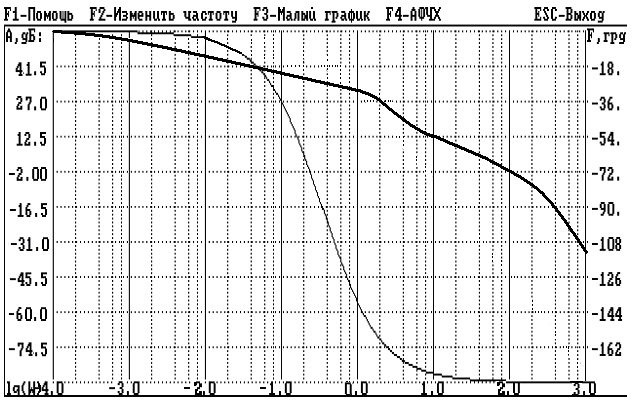
Рис.6 ЛАХ и ЛФХ синтезированной системы

Заключение
По заданной конструктивной схеме составили функциональную схему и динамическую модель исследуемого объекта в виде системы дифференциальных уравнений. Составили структурную схему и реализовали ее на ЭВМ. Определили показатели качества системы. Провели синтез САР с учетом дополнительных условий. Проанализировав полученную систему удостоверились, что она удовлетворяет заданным требованиям.
Используемая литература
Теория автоматического управления: Учеб. для вузов по спец. “Автоматика и телемеханика”. В 2-х ч. Ч.I. Теория линейных систем автоматического управления/ Н.А. Бабаков, А.А. Воронов, А.А. Воронова и др.; Под ред. А.А. Воронова.—2-е изд., перераб. и доп.—М.: Высш.шк.,1986.—367с.,ил.
2. В.В. Семенов, А.В. Пантелеев, А.С. Бортовский. Математическая теория управления в примерах и задачах. – М.: МАИ, 1997.