

курсовая работа / Курсач2часть+
.doc

Задание 2
Анализ нелинейной системы
По заданной структурной схеме системы автоматического управления построить ее фазовый портрет методом припасовывания. По фазовому портрету выполнить анализ системы автоматического управления и определить ее устойчивость.
Д ано:
ано:
T0=16.2 awср=0.5
K0=900 Umax=1,1
K1=0.84 b=awср/K1
K2=10.3 w0=(dφ/dt)=K2K3Umax
K3=0.004
-
Упростим схему
В заданной стуктурной схеме проведем преобразования с целью разделения в два звена линейную и нелинейную части данной системы.

где W(p) – эквивалентная передаточная функция всех линейных звеньев системы.
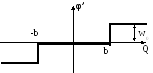
F(Q1-Q2) – эквивалентная статическая характеристика всех нелинейных элементов.
![]() ;
;
![]() .
.
Промежуточные значения: b=0.6; w0=0.0453
-
Решение системы методом припасовывания
По определению W(p)=Q2/Q3 , следовательно
W(p)·Q3=Q2;
Q3=F(Q1-Q2);
Q2=W(p)·F(Q1-Q2).
Зная линейную часть преобразуем уравнения:
![]() ,
где K=К0К1К2К3
,
где K=К0К1К2К3
![]() .
.
Будем считать входное воздействие Q1 системы постоянным, тогда перейдем от величины Q2 к ее приращению относительно постоянного воздействия Q1.
Обозначим Q2-Q1=x
px=pQ2-pQ1;
px=pQ2.
С учетом замечаний для приращений получим:
![]()
Решение данного уравнения будет строиться исходя из заданной нелинейности. В данной работе нелинейной частью системы является трехпозиционное реле (статическая характеристика дана ранее).

В соответствии с системой запишем уравнение, с учетом того, что функция является нечетной, т.е. симметрична относительно начала координат.
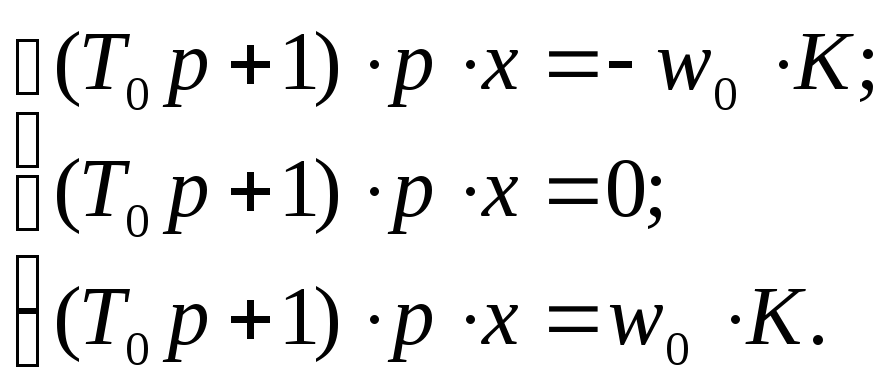
Пусть px=V, тогда система приобретет вид:
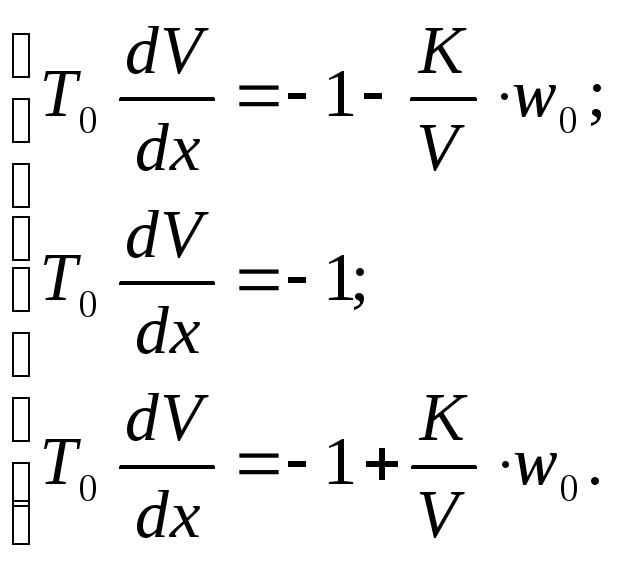
Найдем решение каждого из уравнений системы по очереди:
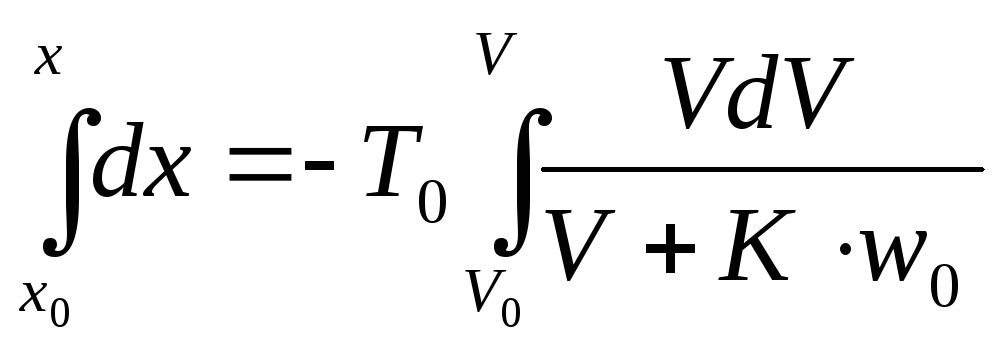
А)
![]()
Т.к. изначально система выведена в точку фазовой плоскости М0 с координатами (x0,V0) , то интегрирование будет: от x0 до x ; от V0 до V.
![]()
![]()
В)
![]()
Решение аналогично.
![]()
Б)
![]()
![]()
![]() -
отрезок прямой для интервала
-
отрезок прямой для интервала
![]()
Все уравнения получены. Построим фазовый портрет.
Пусть первая точка будет M0(-0,6;-0,15). Тогда первое уравнение будет:
![]() для
х<-0.6
для
х<-0.6
Вторая точка будет М1(-0,6;0,14), тогда второе уравнение будет:
![]() для
–0.6≤x≤0.6
для
–0.6≤x≤0.6
Третья точка будет М2(0,6;0,07), тогда третье уравнение будет:
![]() для
x>0.6
для
x>0.6
Четвертая точка будет М3(0,6;-0,06), тогда четвертое уравнение будет:
![]()
Последнее уравнение пересекает ось абсцисс в интервале (-0,6;0,6) в точке М4(-0,42;0), следовательно все уравнения для фазового портрета найдены и с этого момента система блуждает с нулевой скоростью и неопределенностью по координате от -0,6 до +0,6, это состояние эквивалентно состоянию устойчивости.
По фазовому портрету можно сделать следующие выводы: анализируемая нелинейная система устойчива и по характеру процесса в системе – переходный процесс быстро затухает.

По заданной структурной схеме составим принципиальную схему системы автоматического регулирования температуры:
где ЧЭ – чувствительный элемент (датчик или первичный преобразователь температуры);
РП – реле поляризованное;
ОВ – обмотка возбуждения;
Р – редуктор;
РО – регулирующий орган (заслонка);
ОР – объект регулирования;
Д – двигатель постоянного тока.
Объект регулирования – апериодическое звено первого порядка с постоянной времени T0=16,2с, коэффициент передачи объекта и регулирующего органа К0=900оС/рад, коэффициент передачи чувствительного элемента К1=0,84а-в/оС, коэффициент передачи двигателя К2=10,3рад/(В·с), передаточное отношение редуктора i=250. Статическая характеристика поляризованного реле была приведена ранее. Максимальное напряжение на выходе реле 1,1В.