

Реализация математической модели цифровой системы в переменных состояния с помощью пакетов MatLab, MathCad.
Для реализации модели в переменных состояния с помощью пакета MathCAD используем разностные уравнения, которые можно рассчитать по синтезированной структурной схеме с вводом новых переменных (рис. 11):
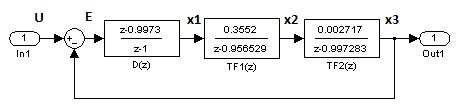
рис. 11
Запишем уравнения для каждого элемента входящего в систему.
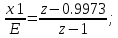


Преобразуем полученные уравнения в линейные, используя замену: X*Z -> X(n+1), X ->X(n). Перенесём переменные с (n) вправо, с (n+1) влево.




Переносим найденные уравнения в MathCAD:
![]()
![]()

Результат выполнения программы на рис. 12.

рис. 12
Не трудно заметить, что график вышел из 5%-ной зоны, то есть какие-то переменные были некорректно округлены. Этого можно избежать находя z-изображения через прямое z-преобразование того же MathCAD. Однако система осталась устойчива, перерегулировка невелика, по этому считаем результат достигнутым.
Теперь построим модель в переменных состояния. Для этого найдём передаточную функцию всей системы:





Передаточная функция разомкнутой системы W123:

Передаточная функция замкнутой системы Ws:

Найденная передаточная функция показывает связь между входом и выходом системы:

Отсюда разностное уравнение во временной форме:

Z-изображение управляемой величины:

Структурная схема ЦСАУ в переменных состояния показана на рис. 13.
b0
a0

b1
Σ

a1





Σ

a2




u(n)
x3(n) x2(n) x1(n)
Σ








рис. 13
По структурной схеме записываем разностные уравнения:




Матрицы состояния:

В нашем уравнении:
a2 = -2.953812; a1 = 2.908705; a0 = -0.954890;
b1 = 0.0009633; b0 = -0.0009607;
Смоделируем систему в приложении Simulink (рис. 13-14):

График переходной функции совпадает с графиками полученными при создании аналоговых моделей. Система устойчива и не выходит и допустимой зоны перерегулирования.

рис. 13

Рис. 14
Выводы: сравнение синтезированных аналоговой и цифровых систем.
В ходе курсовой работы были синтезированы несколько математических моделей одной и той же системы. Сравним результаты полученный каждой математической моделью с исходной аналоговой с помощью Simulink (рис. 15).

рис. 15
На входы осциллографа подаются такие сигналы:
Чисто аналоговая система (жёлтая линия).
Аналоговая система с дискретным регулятором (розовая линия).
Чисто дискретная система (голубая линия).
Дискретная система в пространстве состояний (красная линия).
Максимально допустимый уровень перерегулировки +5% (синяя линия).
Уровень единичного сигнала (зелёная линия).
Модели дают практически одинаковый результат – система устойчива и укладывается в 5%-ный диапазон перерегулирования.

рис. 16
Модели дают практически одинаковый результат – система устойчива и укладывается в 5%-ный диапазон перерегулирования.

рис. 17
Масштабируя графики видим следующий результат (рис. 17): при переходе от аналоговой модели к дискретной, кривая переходного процесса «уплывает». Первые потери происходят после замены аналогового регулятора дискретным. Ещё большие потери –после замены остальных аналоговых элементов дискретными эквивалентами. При дальнейшей работе с дискретной схемой (например переход от модели пространства сигналов к модели в пространстве состояний) погрешность не увеличивается – голубой и красный график совпадают. Следовательно, ошибки вносятся на этапе z-преобразования. Для получения точных значений и соответственно качественных эквивалентных схем, этому этапу следует уделить особое внимание и производить вычисления с как можно более высокой точностью.