

4. Моделирование характеристик системы с учётом компенсатора
Система без компенсатора имеет вид:
Переходной процесс системы без компенсатора имеет вид:

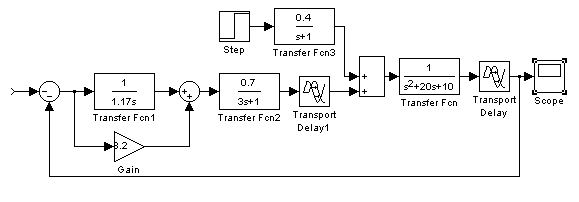
Система с компенсатором имеет вид:

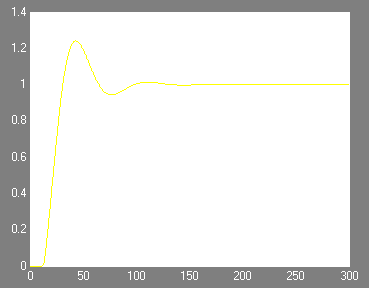
Переходной процесс системы с компенсатором:
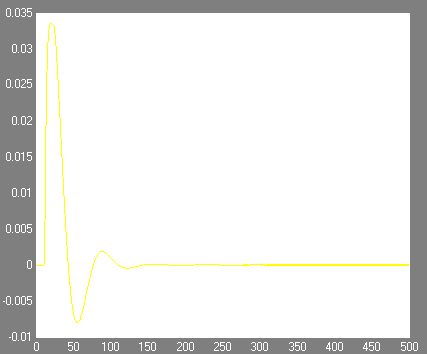
Из графиков видно, насколько компенсатор устраняет возмущение.
5.Исследование системы управления с учётом нелинейности.
Случайный сигналы играют важную роль на практике, например они искажают наблюдаемые и измеряемые сигналы или же являются возмущениями в системах регулирования. Плотность распределения(плотность вероятности) p(x). Вероятность того, что значение случайной величины лежит в интервале от x до x+dx. Здесь плотность p(x) обозначает функцию от
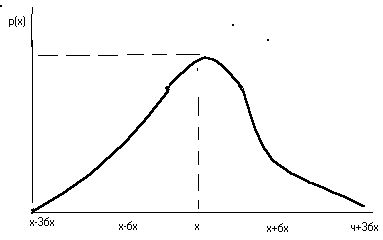
Кривая нормального
распределения p(x),
x
для
определенного типа распределения. На
рисунке приведен график p(x)
для наиболее часто встречающегося, и
особенно важного нормального
распределения(кривая Гауса). По нему
можно определить, какова вероятность
появления определенных значений
случайного сигнала. Вероятность того,
что значение x
лежит в интервале
![]() равна величине интервала
равна величине интервала
Функция распределения F(x) задается выражением
Значения x лежит в интервале - x ; следовательно,
Эти соотношения справедливы как заранее известных (детерминированных) сигналов, так и для случайных (стохастических) сигналов x(t). Плотность вероятности p(x) случайных сигналов может зависеть от времени. Плотность распределения которых p(x) не изменяется. Существуют следующие статические характеристики случайного сигнала x(t), которые достаточно просто изменяются и позволяют судить о свойствах x(t).
Методы исследования нелинейных систем:
классический (метод фазовых траекторий в фазовых плоскостях);
линеаризация нелинейных характеристик.
Получение первым методом зависимостей а и w от параметров систем выше второго порядка слишком сложно.
Основой второго метода является предположение о том, что автоколебания приближенно можно искать в синусоидальной форме.
![]()
где а и w — искомые амплитуда и частота колебаний.
Пусть наша система будет иметь вид:

Переходной процесс этой системы будет иметь вид:
6.Коррекция параметров регулятора нелинейной системы.
В нашем случае пересчёт регулятора не нужен, так как сигнал на выходе системы с нелинейностью повторяет сигнал системы без нелинейности:

Переходные процессы этой системы будет иметь вид:

Вследствие абсолютной схожести переходных процессов делаем вывод о не влиянии нелинейности на нашу систему.
Заключение
Задачами линейной теории автоматического управления и регулирования являются:
изучение динамических свойств и характеристик различных типов звеньев автоматических систем любой физической природы и конструкции;
формирование функциональных и структурных схем систем автоматического управления и регулирования;
построение динамических характеристик этих систем;
определение ошибок и показателей точности замкнутых систем;
исследование устойчивости замкнутых систем;
оценка качественных показателей процессов управления;
определение чувствительности систем к изменению параметров и других факторов;
Изучение различных видов корректирующих устройств, вводимых в системы для повышения точности и улучшения динамических качеств;
Создание частотных, корневых и других методов синтеза корректирующих устройств и различных методов оптимизации систем по показателям качества;
Разработка методов анализа и синтеза сложных многомерных и комбинированных систем автоматического управления.
В этой работе была сделана попытка раскрыть большинство из этих пунктов.
В первом разделе был произведён расчёт непрерывного регулятора, исходя из желаемого показателя колебательности М
Далее было скомпенсировано случайное воздействие в виде спектральной плотности, для чего было введено корректирующее устройство.
Введение корректирующих устройств по внешнему воздействию является важным методом повышения точности систем автоматического регулирования и управления. Этот способ коррекции, существенно повышая точность системы, почти не влияет на качество переходного процесса.
Одно из заданий данной работы заключалось в нахождении минимальной величины дисперсии. Для выполнения этого пункта был использован графический метод, из которого были найдены параметры регулятора, обеспечивающие минимум дисперсии.
В последнем пункте был произведен расчёт системы с релейным регулятором, и были найдены амплитуда и частота автоколебаний. Также была предпринята попытка произвести гармоническую линеаризацию нелинейной характеристики, и было установлено, что этот метод для нашей системы с таким релейным регулятором не применим.
Все произведённые расчёты является базой для построения замкнутых автоматических систем и для инженерных расчетов при анализе существующих и проектировании новых систем автоматического управления.
В заключении отметим, что в настоящее время для целей синтеза автоматического регулирования используются электронные вычислительные машины, позволяющие производить полное или частичное моделирование проектируемой системы. В курсовой работе для расчётов были использованы математические пакеты MATLAB R12 6.0, MathCAD 2000 Professional, Microsoft Excel.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. -М.: «Наука», 1972.
2. Попов Е.П. Автоматическое регулирование и управление. - М.: «Наука», 1966.
3. Попов Е.П. Теория линейных систем автоматического регулирования и управления. -М.: «Наука», 1978.
Теория автоматического управления. Под ред. А.В. Нетушила. -М.: «Высшая школа», 1976.
Попов Е.П. О самонастраивающихся системах управления. –М.: «Высшая школа»,1963, 26 стр.
Швец А. Г. Синтез устройств. - М.: «Наука», 1995
Конспект лекций.