

2.3 Построение фазового портрета
Передаточная
функция есть
 или
или
![]() ,
,
где
![]() -передаточная
функция линейной системы;
-передаточная
функция линейной системы;
Подставляя в эту формулу значение передаточной функции получим:
![]()
Приведенную формулу можно записать в виде:

Воспользуемся пакетом MathCad для решения этого дифференциального уравнения.
Введем
замену
![]() и исключим из правой части уравнения
производную:
и исключим из правой части уравнения
производную:
![]()
Для того чтобы построить фазовый портрет, необходимо, чтобы степень числителя и знаменателя не превышала вторую степень, поэтому элементы выше второй степени исключаем. Тогда получим:

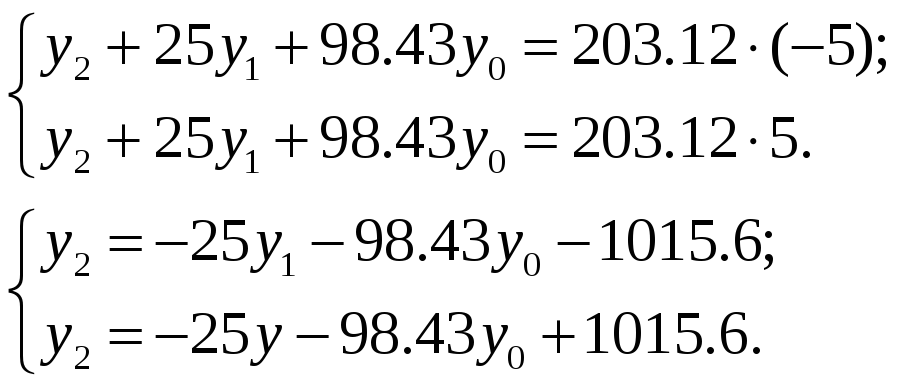
Так
как в качестве нелинейного элемента
используется реле с гистерезисом со
статической характеристикой, представленной
на рисунке 11, то подставляя значение
![]() для двух участков, получим систему:
для двух участков, получим систему:
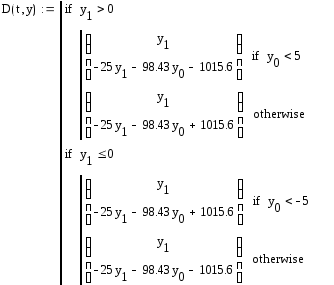
Создадим матрицу для решения дифференциального уравнения.
В данной матрице реализовано условие перехода от одного уравнения к другому. Зададим матрицы для трех начальных условий:
![]()
![]()
![]()
Возьмем
количество точек равным 1000 и конечное
время интегрирования 200, то матрица
решений запишется как: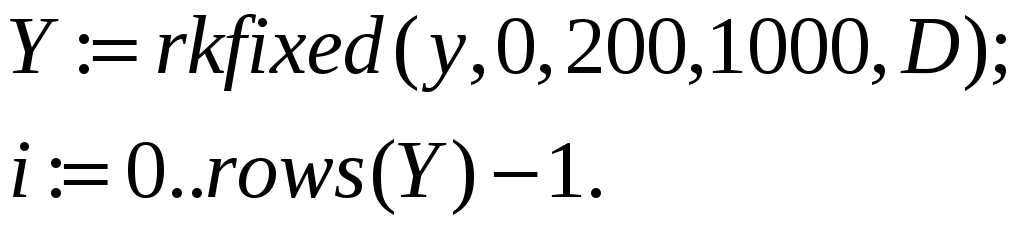
Построим фазовый портрет:
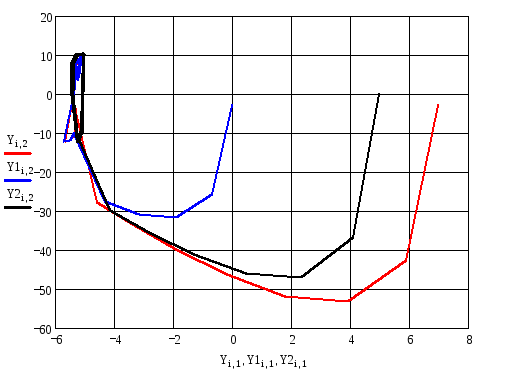
Рисунок 17 - Фазовый портрет нелинейной системы

Рисунок 18 – Переходный процесс
Вывод:
На
рисунке 17 представлен фазовый портрет
нелинейной системы. Это типовой вид
кривой. Переключение с одного уравнения
на другое происходит в точке
![]() =
5, при
=
5, при
![]() >0,
и в точке
>0,
и в точке
![]() =
-5, при
=
-5, при
![]() <0
. Характер фазовой линии такой, что она
стремится к устойчивому состоянию, о
чем свидетельствует автоколебательный
процесс (рисунок 18), и впоследствии
образует замкнутый цикл на фазовом
портрете.
<0
. Характер фазовой линии такой, что она
стремится к устойчивому состоянию, о
чем свидетельствует автоколебательный
процесс (рисунок 18), и впоследствии
образует замкнутый цикл на фазовом
портрете.
Система производит автоколебания в предельном цикле с амплитудой:
![]() ,
и частотой
,
и частотой
![]()
Заключение
В ходе данной курсовой работы, была рассмотрена система автоматического регулирования уровня жидкости в гидравлическом резервуаре. Были получены функциональная и структурная схемы системы. Исследована линейная, нелинейная и импульсная части системы.
В ходе исследования линейной части системы, была получена передаточная функция
 ,
по которой был построен переходный
процесс, который свидетельствовал об
устойчивости линейной части системы
,и определены прямые оценки качества
системы:
,
по которой был построен переходный
процесс, который свидетельствовал об
устойчивости линейной части системы
,и определены прямые оценки качества
системы:
- установившееся состояние переходного процесса hуст=1,4;
- 5% трубка;
- hmax=1.4;
- Время первого согласования t1=0.25c;
- Время нарастания tн=0.25c;
- Время регулирования tр=0.125 c.
Бала построена амплитудо - частотная характеристика системы и определены косвенные оценки качества:
- Амплитуда при нулевой частоте A(0)=1.428;
- Максимальная амплитуда Аmax=1.428;
- Резонансная частота wp=0 Гц;
- Частота среза, при которой амплитуда, равна 1 wcp=29 Гц;
-
Полоса пропускания:
 w2=28.16
Гц.
w2=28.16
Гц.
По критериям Гурвица и Найквиста определили, что линейная система устойчива.
В
ходе исследования нелинейной части
системы, с заданной статической
характеристикой нелинейного
элемента, был построен фазовый портрет
- кривая с
замкнутым циклом. Построен
переходный процесс нелинейной системы,
который
свидетельствует об устойчивых
автоколебаниях, амплитудой
![]() ,
и частотой
,
и частотой
![]() .
Включение нелинейного
элемента в системы никак не отразилось
на ее устойчивости.
.
Включение нелинейного
элемента в системы никак не отразилось
на ее устойчивости.
В ходе исследования импульсной части системы, была получена общая передаточная функция:
 .
.
Провели z –преобразование, и получили:

Построили переходный процесс, по которому можно сказать, что импульсная системы неустойчивая. Критерий Шур Кона показал, что импульсная система неустойчивая. Таким образом при введении импульсного элемента в систему, система становится неустойчивой.