

10.2.3. Построение зависимостей ,,при ступенчатом приложении нагрузки

Рис.
62 Структурная схема для построения
зависимостей
 ,
,
 ,
,
T = 0.05*Ta
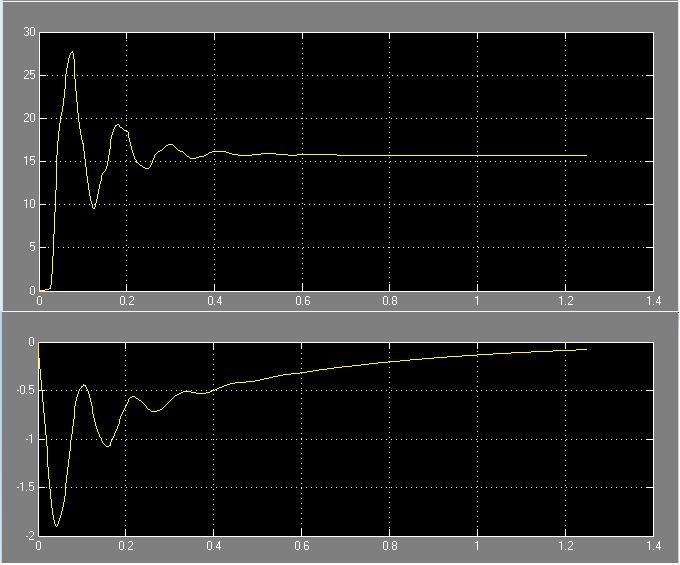
Рис. 63 Зависимость системы w(t) и i(t) соответственно
T = 0.5*Ta

Рис.64 Зависимость системы w(t) и i(t) соответственно
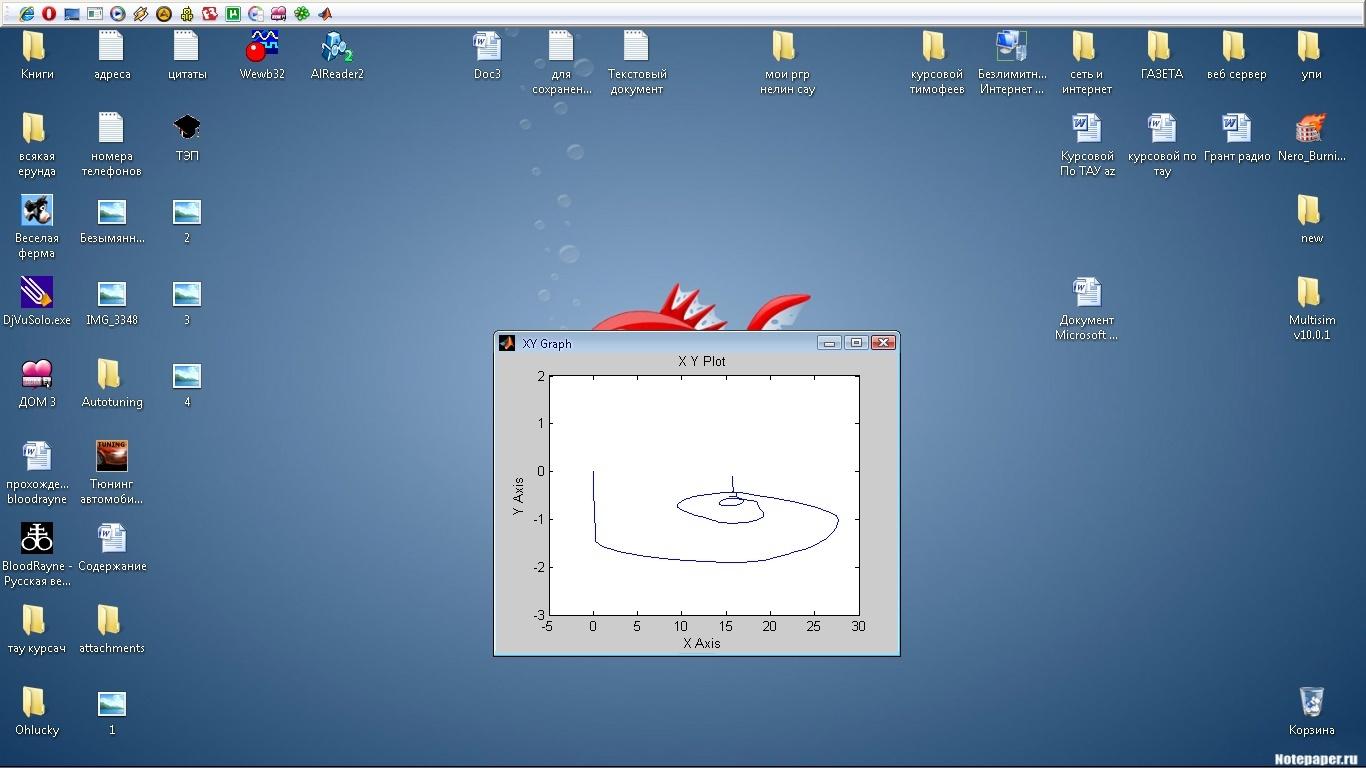
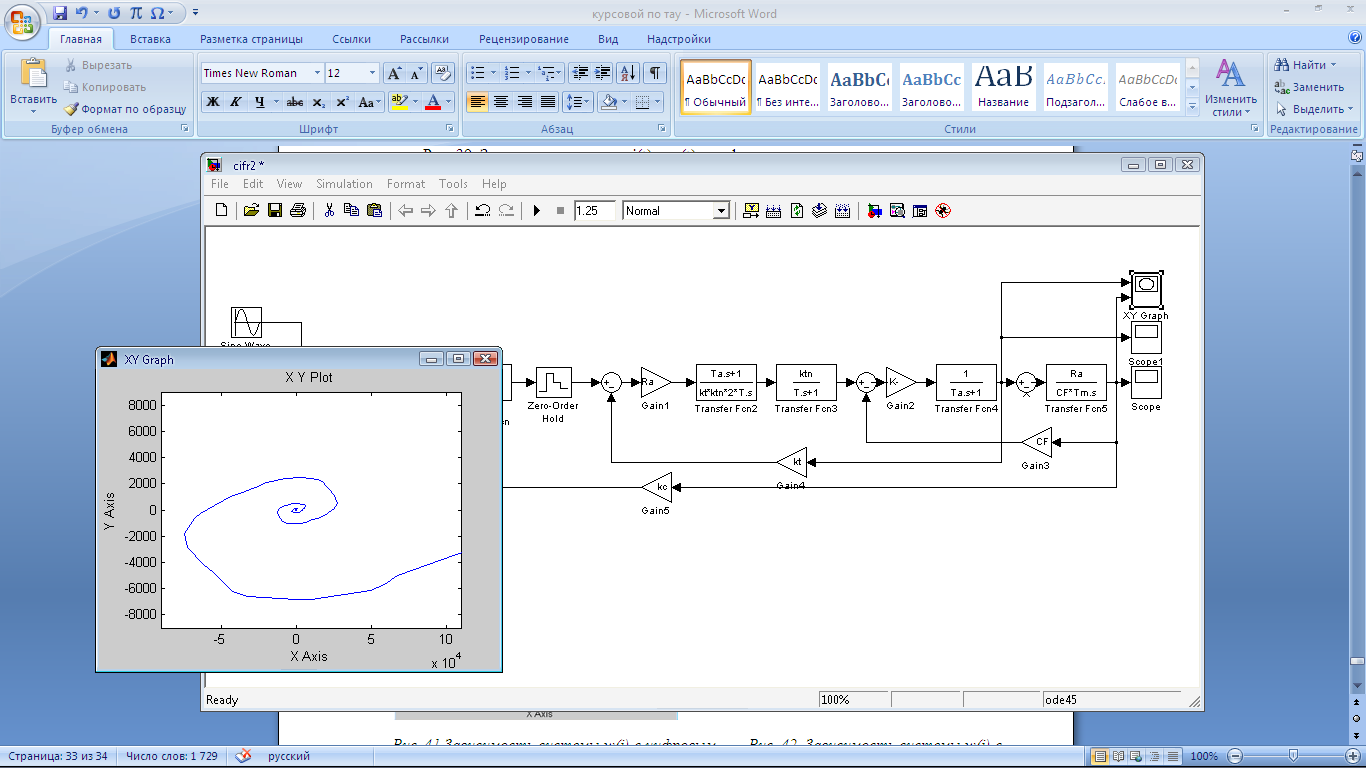
Рис.
65 Зависимость
 системы с Рис.66 Зависимость
системы с Рис.66 Зависимость системы
с
системы
с
цифровым регулятором скорости цифровым регулятором скорости
при T = 0.05*Ta при T = 0.5*Ta
Определение установившейся ошибки
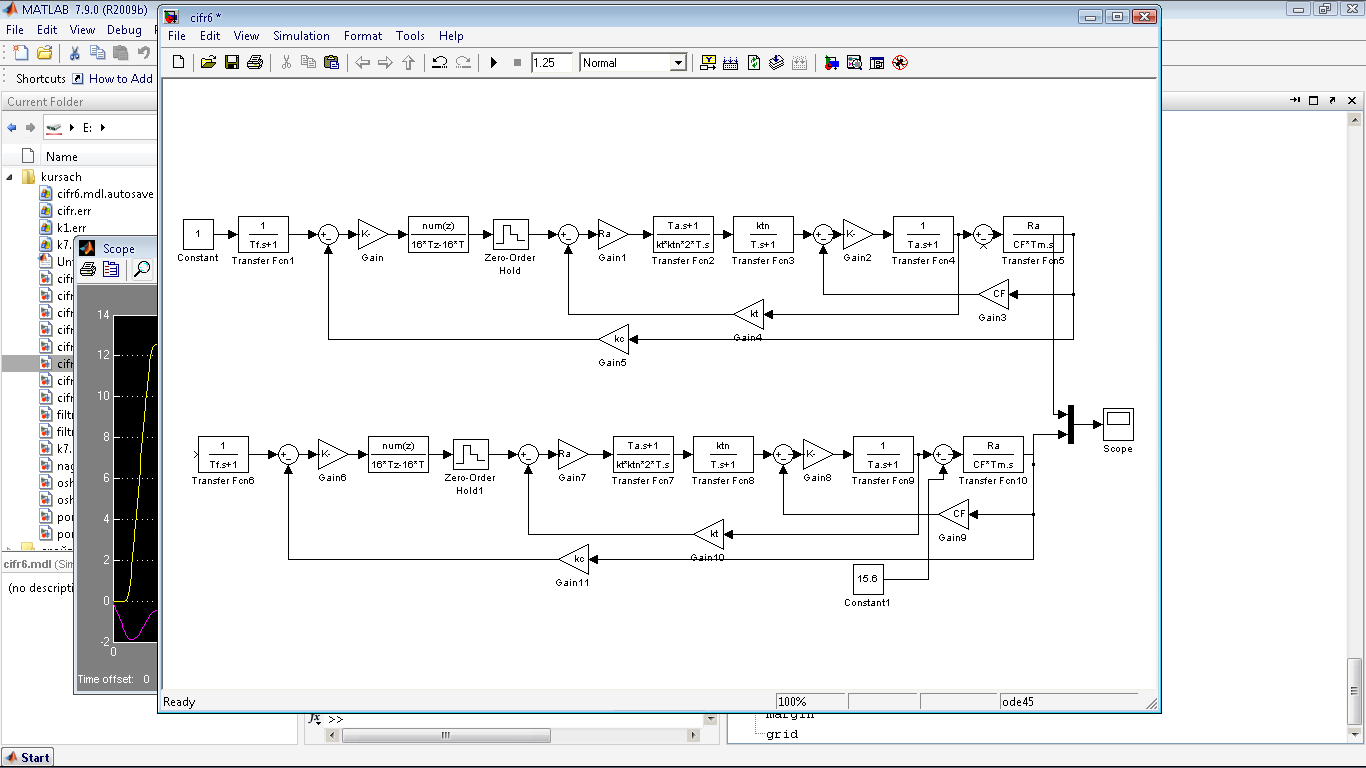
Рис. 66.1 Структурная схема
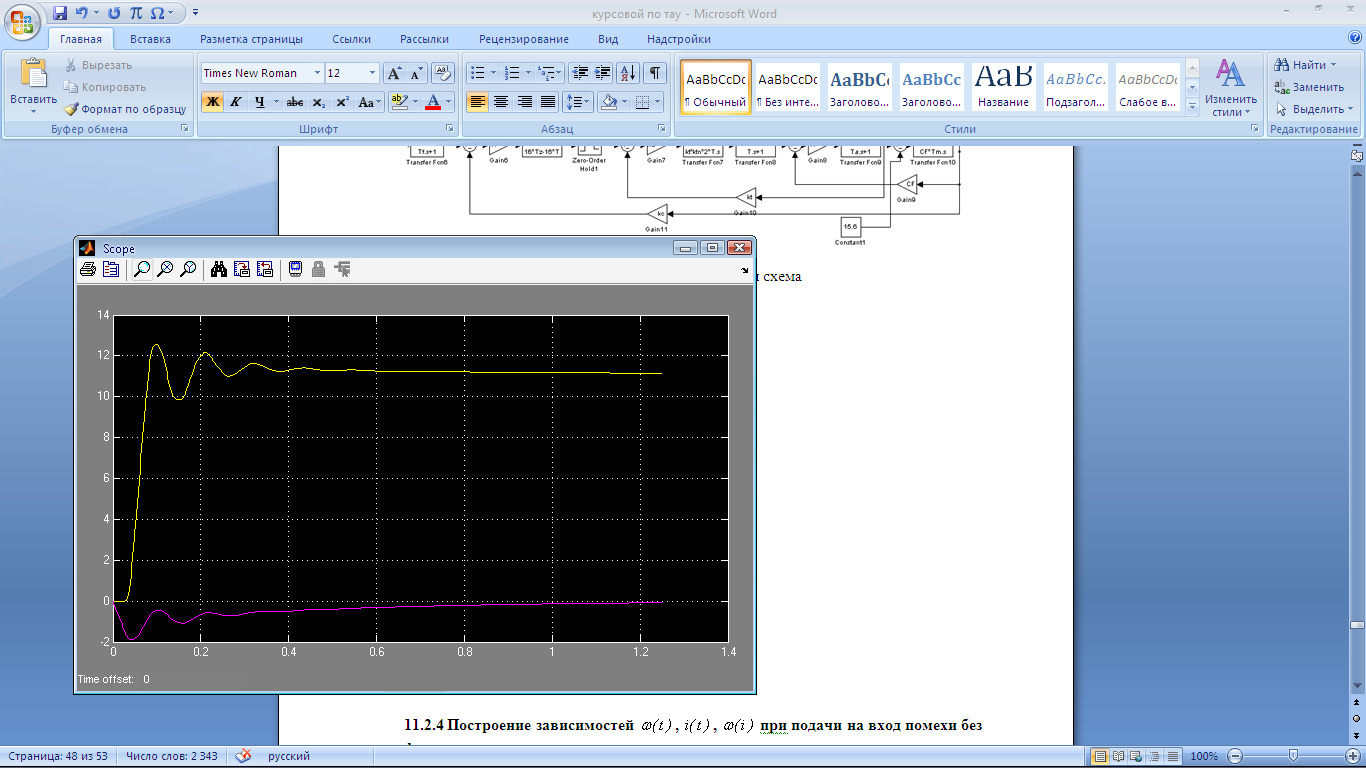
Рис. 66.2 Характеристика
10.2.4 Построение зависимостей ,,при подачи на вход помехи без фильтра
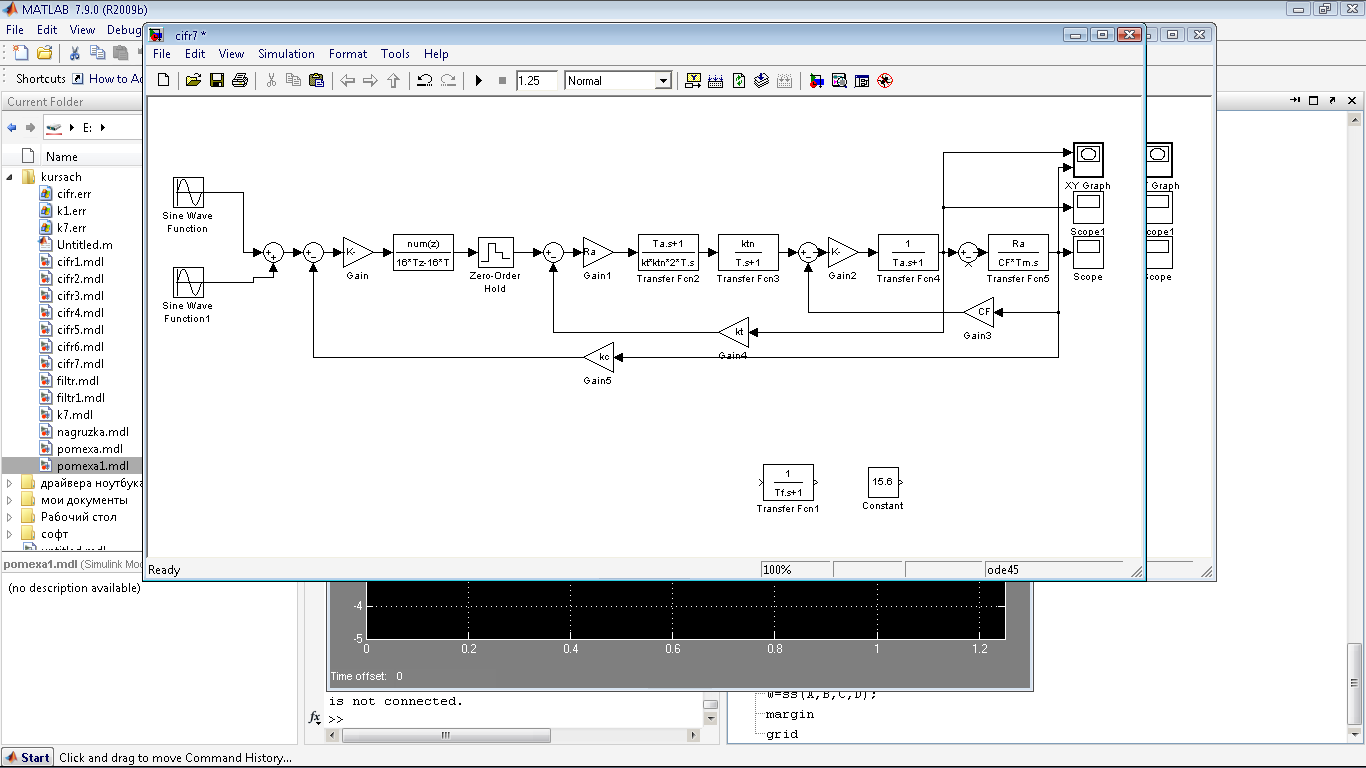
Рис.
67 Структурная схема для построения
зависимостей
 ,
,
 ,
, без
фильтра
без
фильтра
T = 0.05*Ta

Рис. 68 Зависимость системы w(t) и i(t) соответственно
T = 0.5*Ta
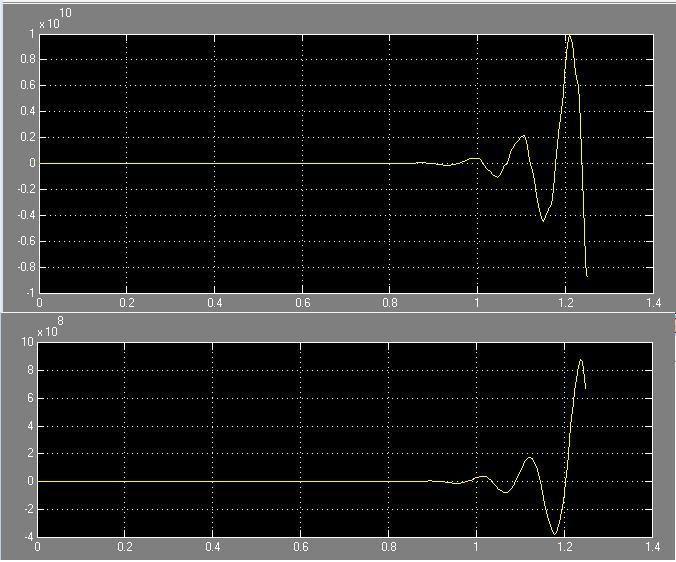
Рис. 69 Зависимость системы w(t) и i(t) соответственно

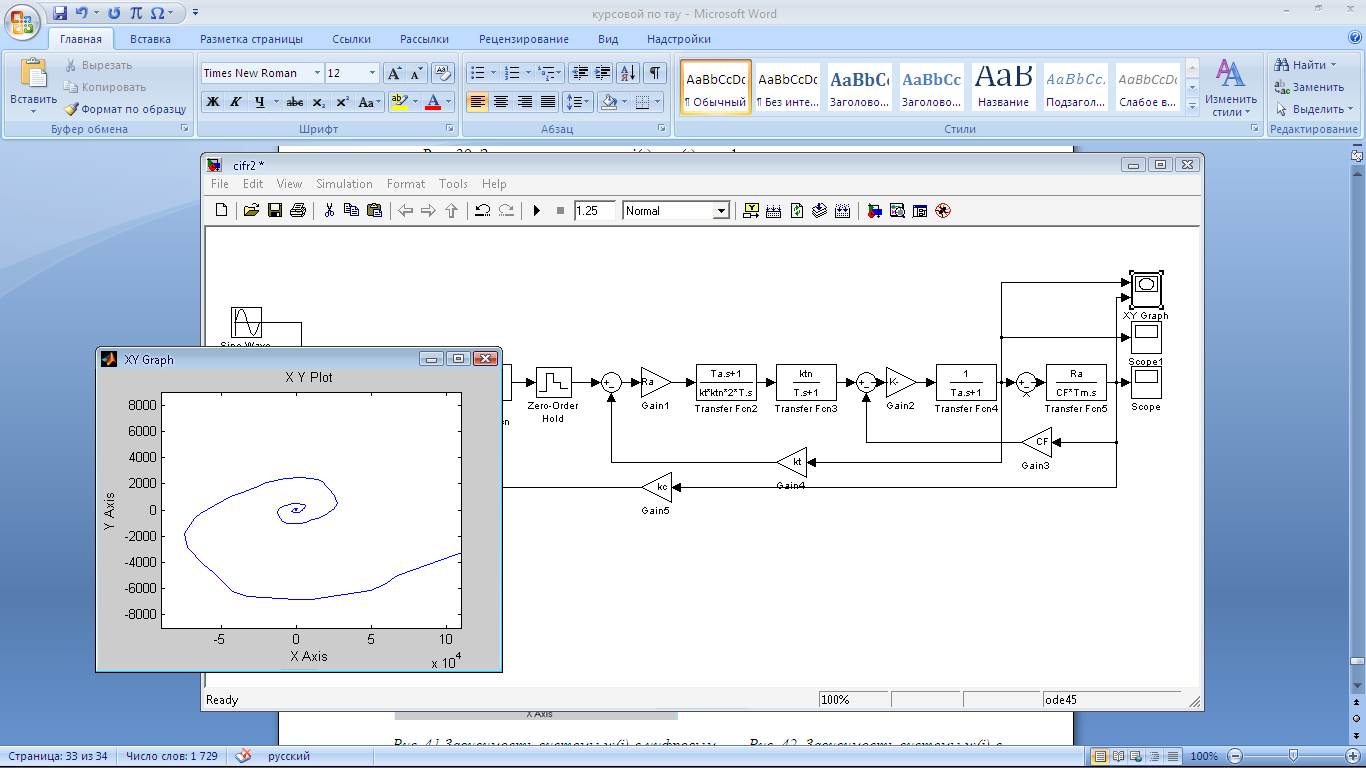
Рис.70
Зависимость
 системы с Рис.71 Зависимость
системы с Рис.71 Зависимость системы
с
системы
с
цифровым регулятором скорости цифровым регулятором скорости
при T = 0.05*Ta при T = 0.5*Ta
10.2.4 Построение зависимостей ,,при подачи на вход помехи с фильтром
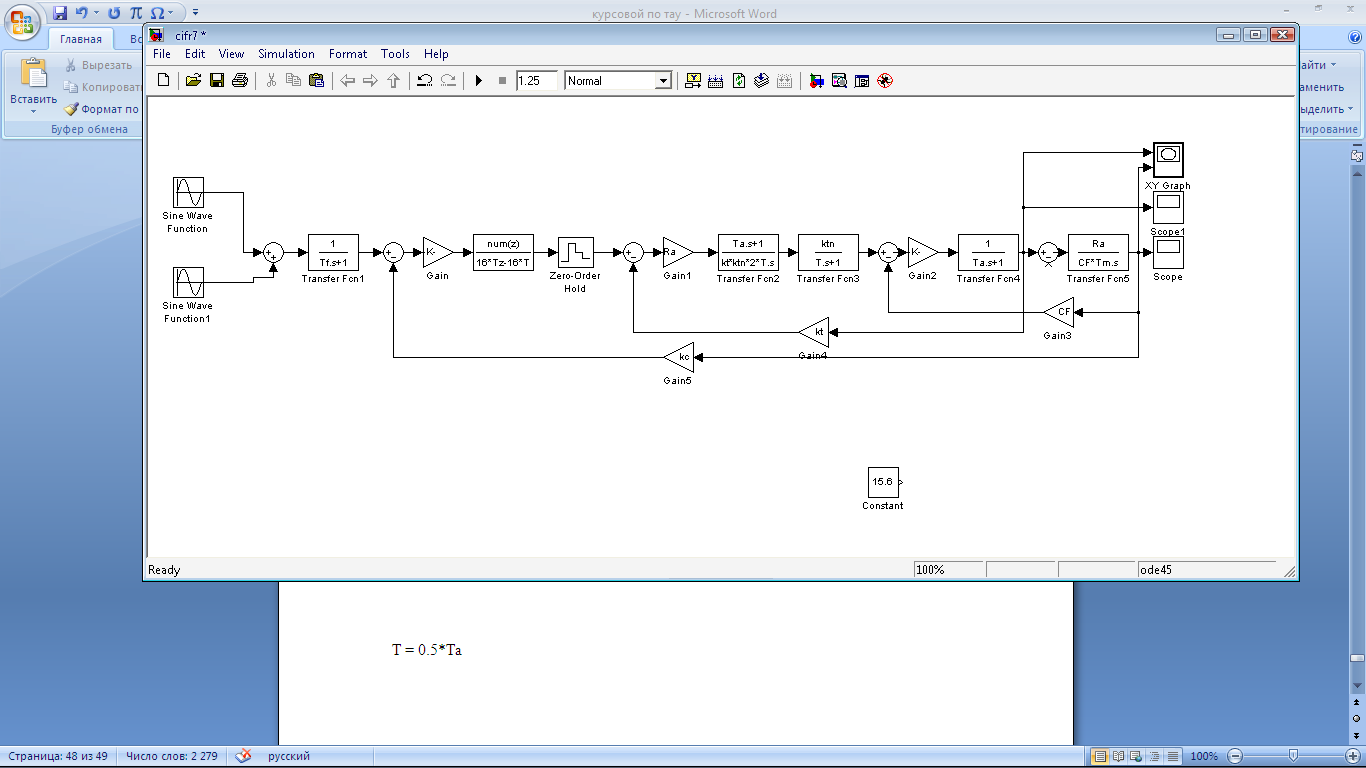
Рис.
72 Структурная схема для построения
зависимостей
 ,
,
 ,
, с
фильтром
с
фильтром
T = 0.05*Ta

Рис. 73 Зависимость системы w(t) и i(t) соответственно
T = 0.5*Ta
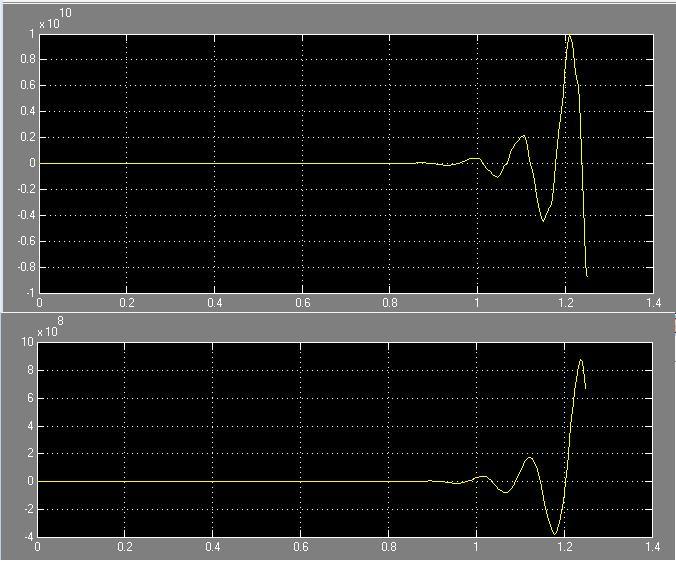
Рис. 74 Зависимость системы w(t) и i(t) соответственно

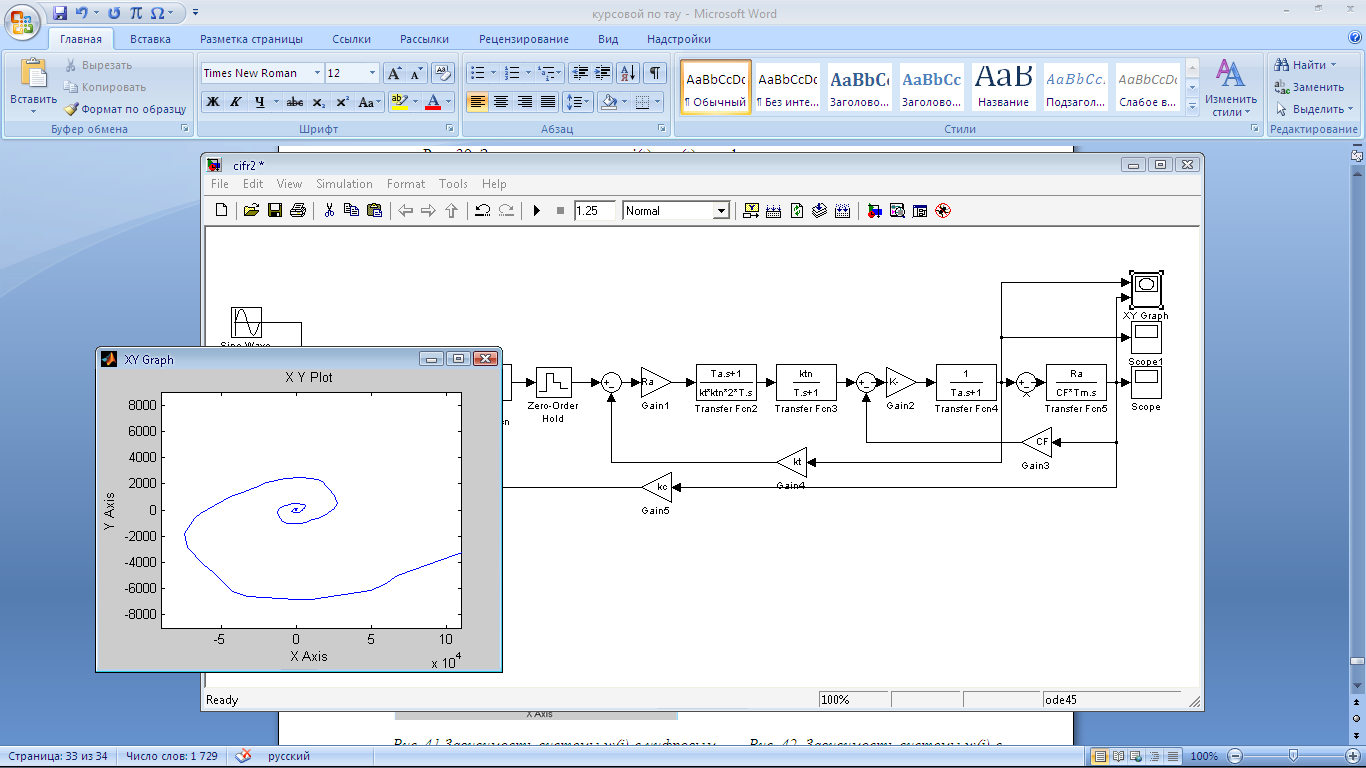
Рис.75
Зависимость
 системы с Рис.76 Зависимость
системы с Рис.76 Зависимость системы
с
системы
с
цифровым регулятором скорости цифровым регулятором скорости
при T = 0.05*Ta при T = 0.5*Ta
10.2.6. Определение коэффициента передачи
Численным методом
-
амплитуда основной гармоники:

-
амплитуда сигнала на выходе системы:

Т.о.
коэффициент передачи

По ЛАЧХ

Рис. 21 ЛАЧХ
По
графику найдем L(w):
 ,
тогда коэффициент передачи
,
тогда коэффициент передачи
Заключение
Составим сопоставительную таблицу показателей качества САУ
|
Показатели качества Тип регулятора скорости
|
σ |
tP, с |
ΔL, дБ |
Δφ, град |
Коэффициент передачи на частоте ω = ω1 | |||||||||
|
Численный эксперимент |
По ЛАЧХ | |||||||||||||
|
Система подчиненного регулирования |
0,55 |
0,12 |
-9,59 |
33,8 |
14.5 |
11.09 | ||||||||
|
Цифровой регулятор |
Стандартное Z- преобразование |
Т=0.05 Тm |
0,081 |
0,08 |
-10,4 |
55 |
14.5 |
11.09 | ||||||
|
Т=0.5Тm |
система неустойчива | |||||||||||||
|
Билинейное Z- преобразование |
Т=0.05 Тm |
0,113 |
0,18 |
-10,1 |
53,7 |
14.5 |
11.09 | |||||||
|
Т=0.5Тm |
система неустойчива | |||||||||||||
|
Задание |
0,08 |
0,1 |
20 |
π/6 |
|
| ||||||||
На основании вышеприведенной таблицы можно сделать следующие выводы:
-перерегулирование для всех вариантов синтеза примерно одинаково и удовлетворяет требованиям задания;
-время регулирования удовлетворяет заданию во всех случаях.
На основании четырех вариантов анализа системы с цифровым регулятором скорости можно сделать выводы:
-переходные характеристики непрерывной и дискретной систем практически совпадают;
-при усложнении способа дискретизации непрерывной системы (переход от стандартных Z - преобразований к билинейному преобразованию) дискретная система все больше приближается к непрерывной.
Библиографический список
1. Бесекерский В.А., Попов Е.П., «Теория систем автоматического регулирования», издательство «Наука», Главная редакция физико-математической литературы, М., 1975, 768 стр.
2. Расчет системы управления автоматизированным электроприводом. Методические указания к курсовому проектированию по дисциплине «Теория автоматического управлении» / В.Л. Тимофеев. Н. Тагил: НТИ(ф) ГОУ УГТК-УПИ. 2002. 17с.
3.Тимофеев В.Л., Баркова О.Н., Исаев И.Н. “Технические и экономические расчеты в курсовых и дипломных проектах” учебное пособие, Нижний Тагил, НТИ(ф) УГТУ-УПИ, 2006