

10.1.3. Построение зависимостей ,,при ступенчатом приложении нагрузки
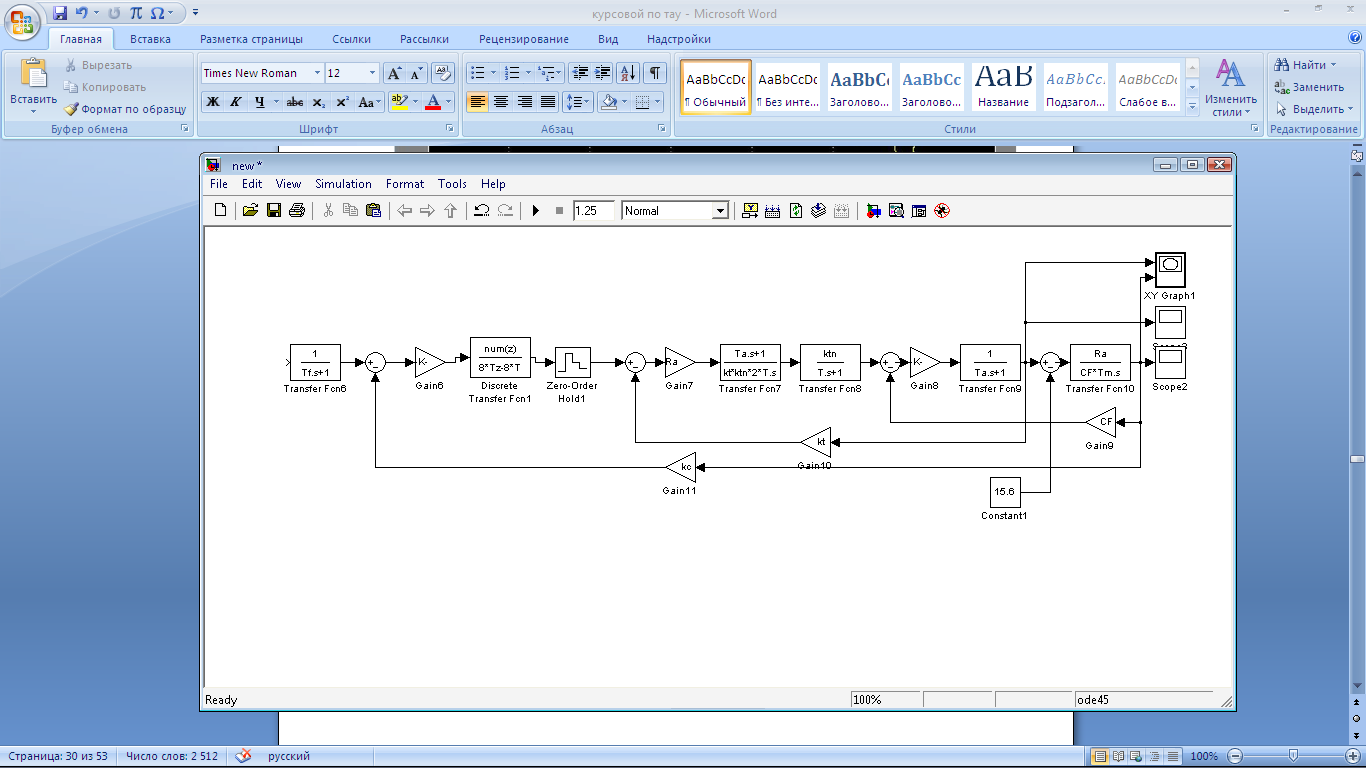
Рис.
33 Структурная схема для построения
зависимостей
 ,
,
 ,
, с
фильтром
с
фильтром
T = 0.5*Ta
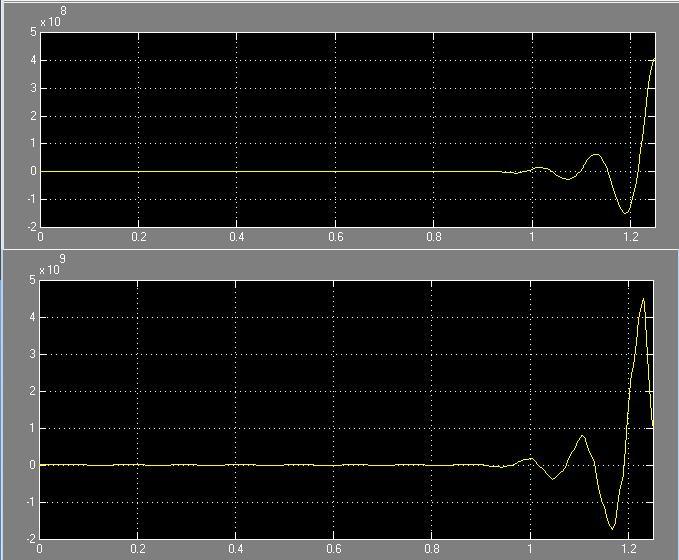
Рис. 34. Зависимость системы w(t) и i(t) с цифровым регулятором с фильтром при ступенчатом приложении нагрузки
T = 0.05*Ta
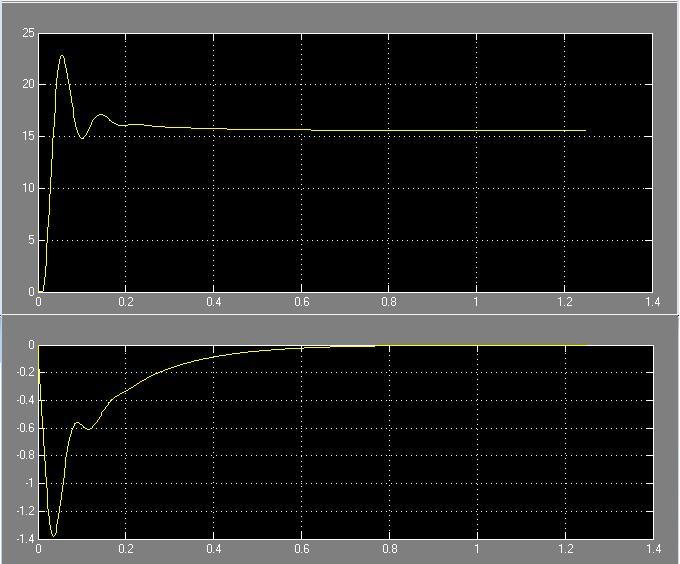
Рис. 35. Зависимость системы i(t) и w(t) с цифровым регулятором с фильтром
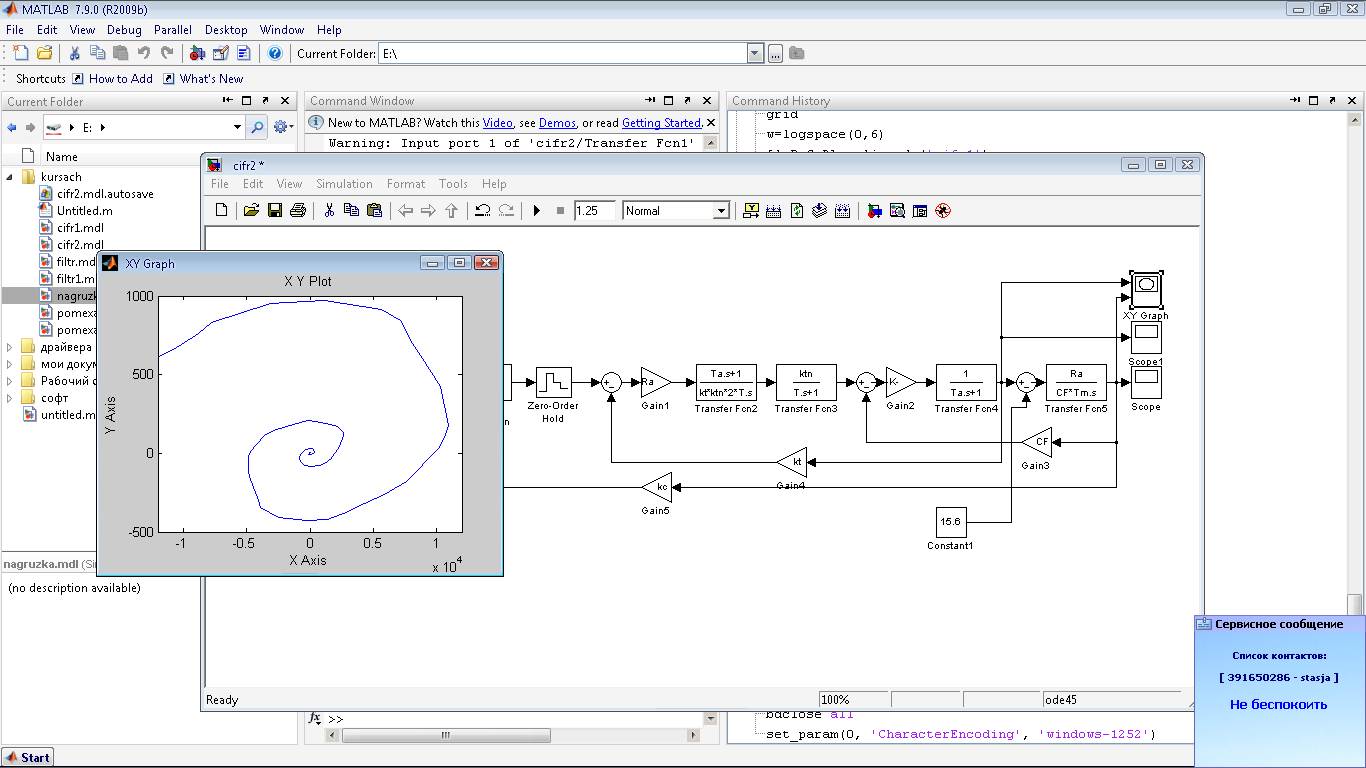
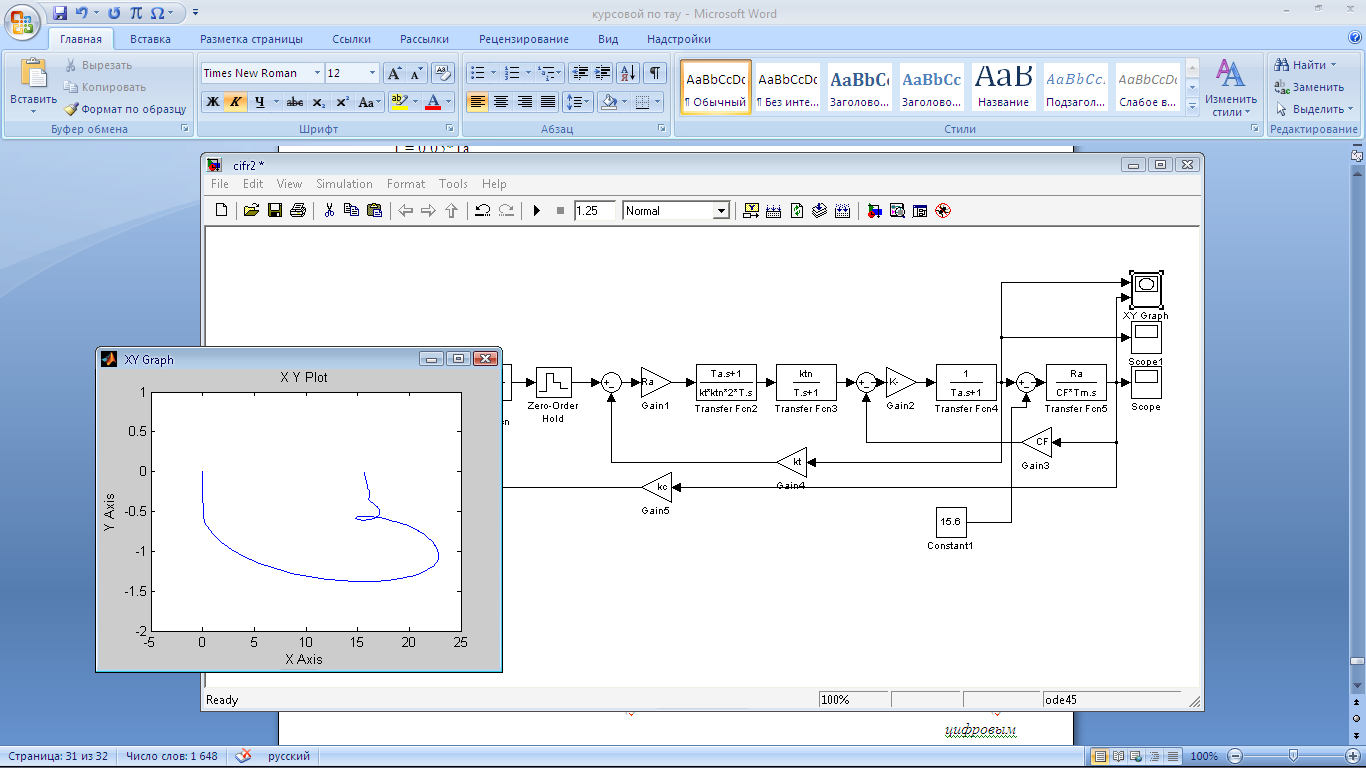
Рис.
36 Зависимость
 системы с Рис. 37 Зависимость
системы с
системы с Рис. 37 Зависимость
системы с
цифровым регулятором скорости цифровым регулятором скорости
при T = 0.5*Ta с фильтром при T = 0.05*Ta с фильтром
Определение установившейся ошибки
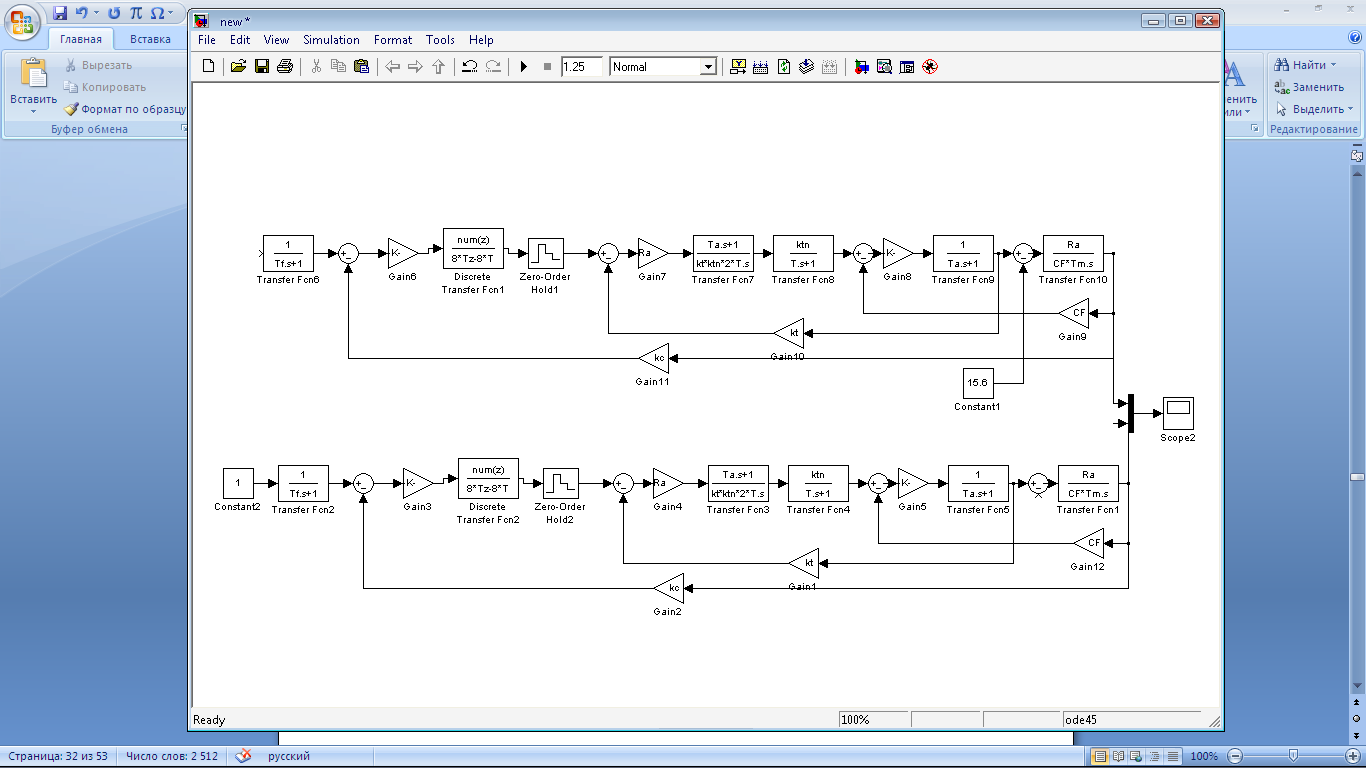
Рис. 37.1 Зависимость системы i(t) и w(t) с цифровым регулятором с фильтром
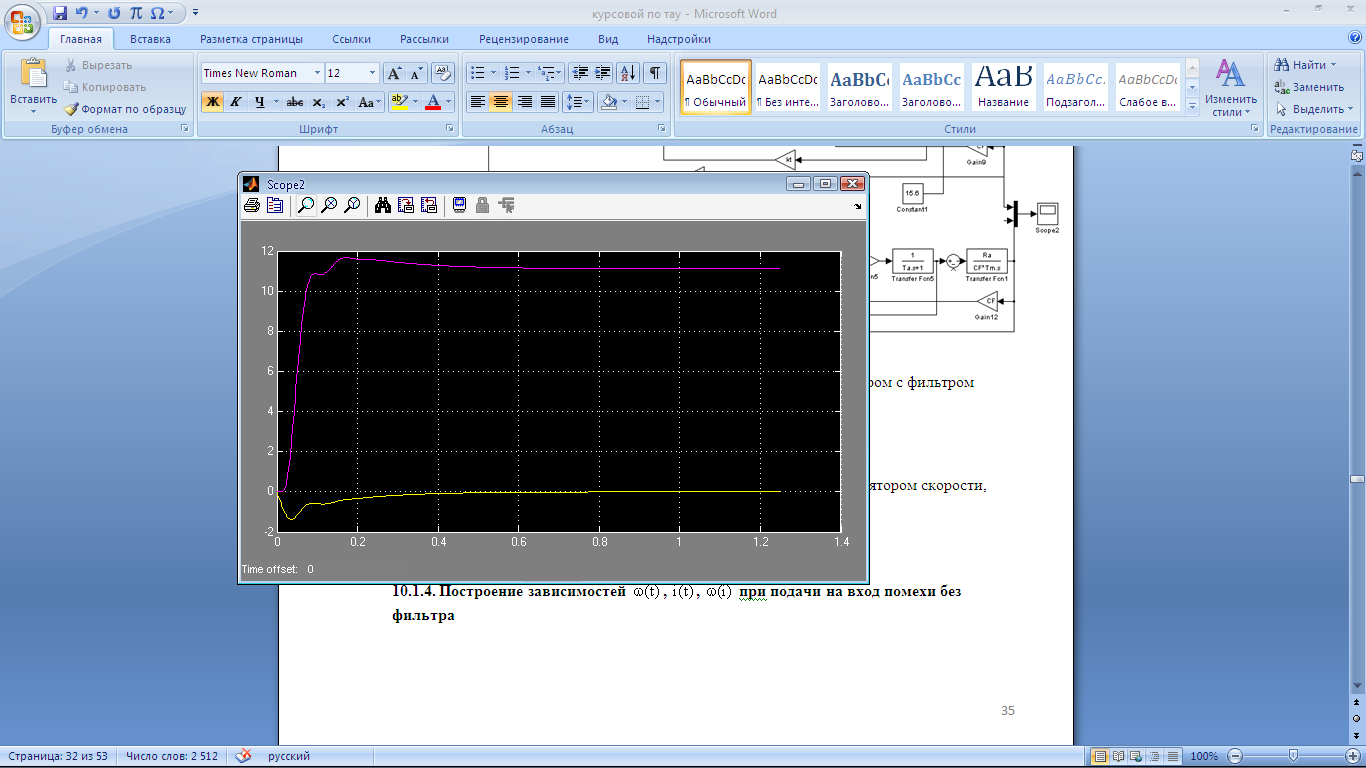
Рис. 37.2 Получившийся процесс
По отношению к сигналу нагрузки, так же как и с не цифровым регулятором скорости, система астатична, следовательно, еуст = 0.
10.1.4. Построение зависимостей ,,при подачи на вход помехи без фильтра
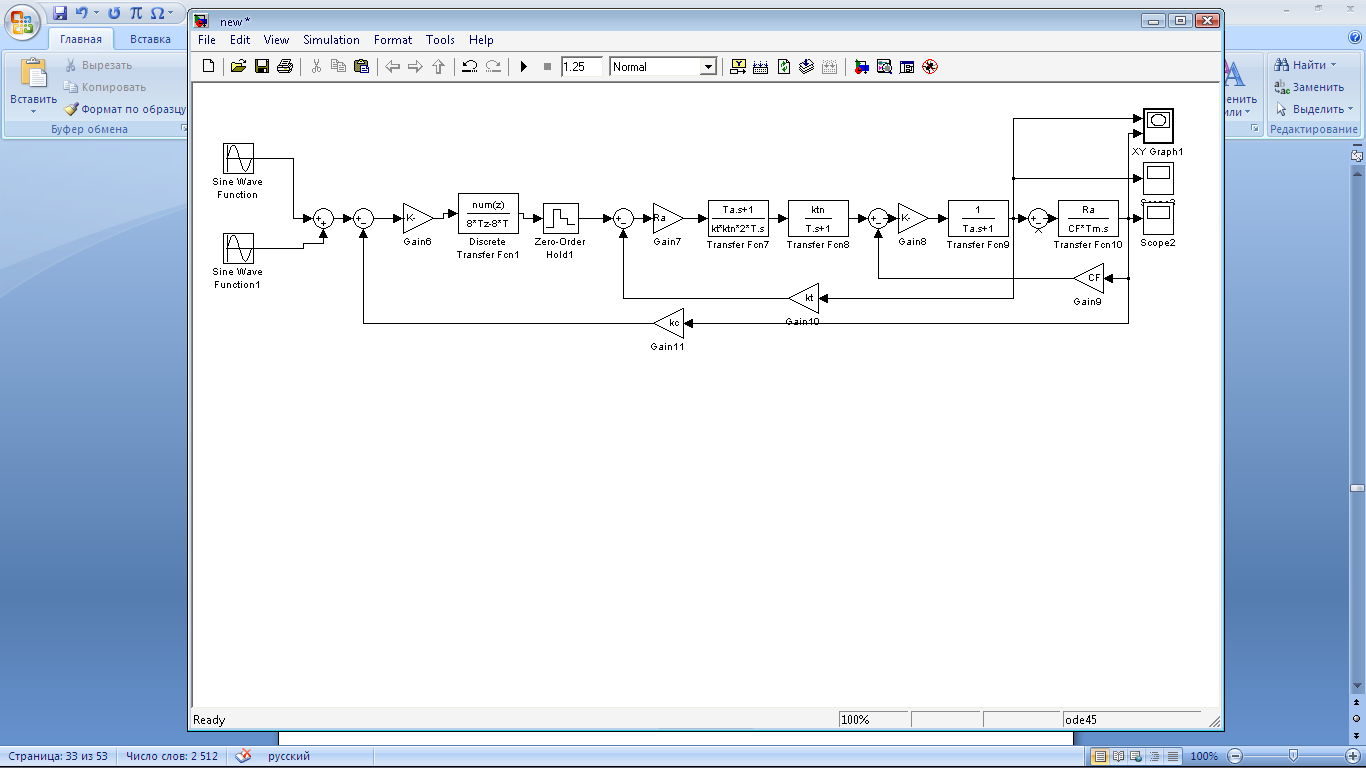
Рис.
38. Структурная схема для построения
зависимостей ,
, ,
, без
фильтра
без
фильтра
T = 0.05*Ta
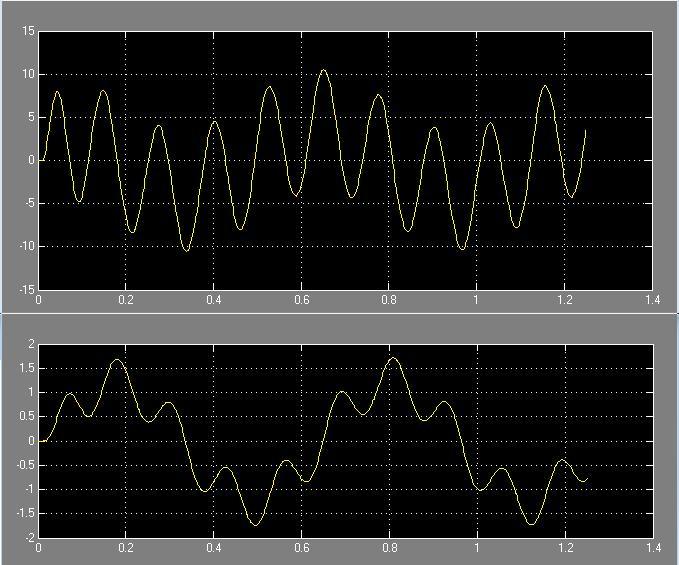
Рис. 39 Зависимость системы i(t) и w(t) с цифровым регулятором соответственно
T = 0.5*Ta
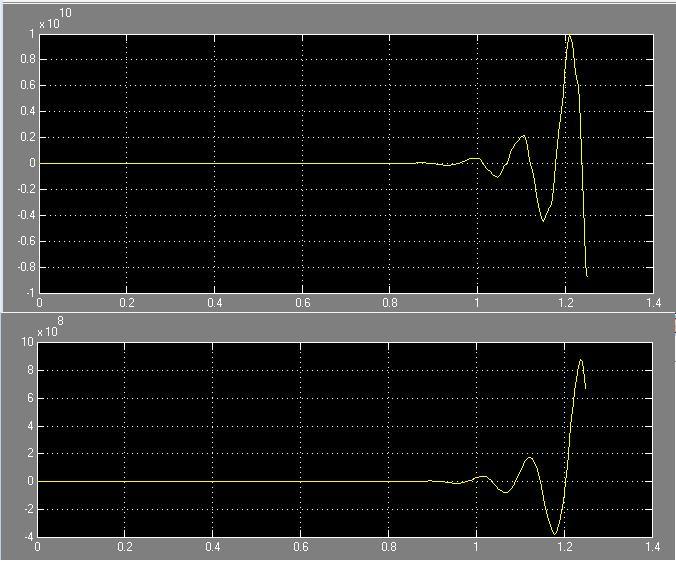
Рис. 40 Зависимость системы i(t) и w(t) с цифровым регулятором соответственно
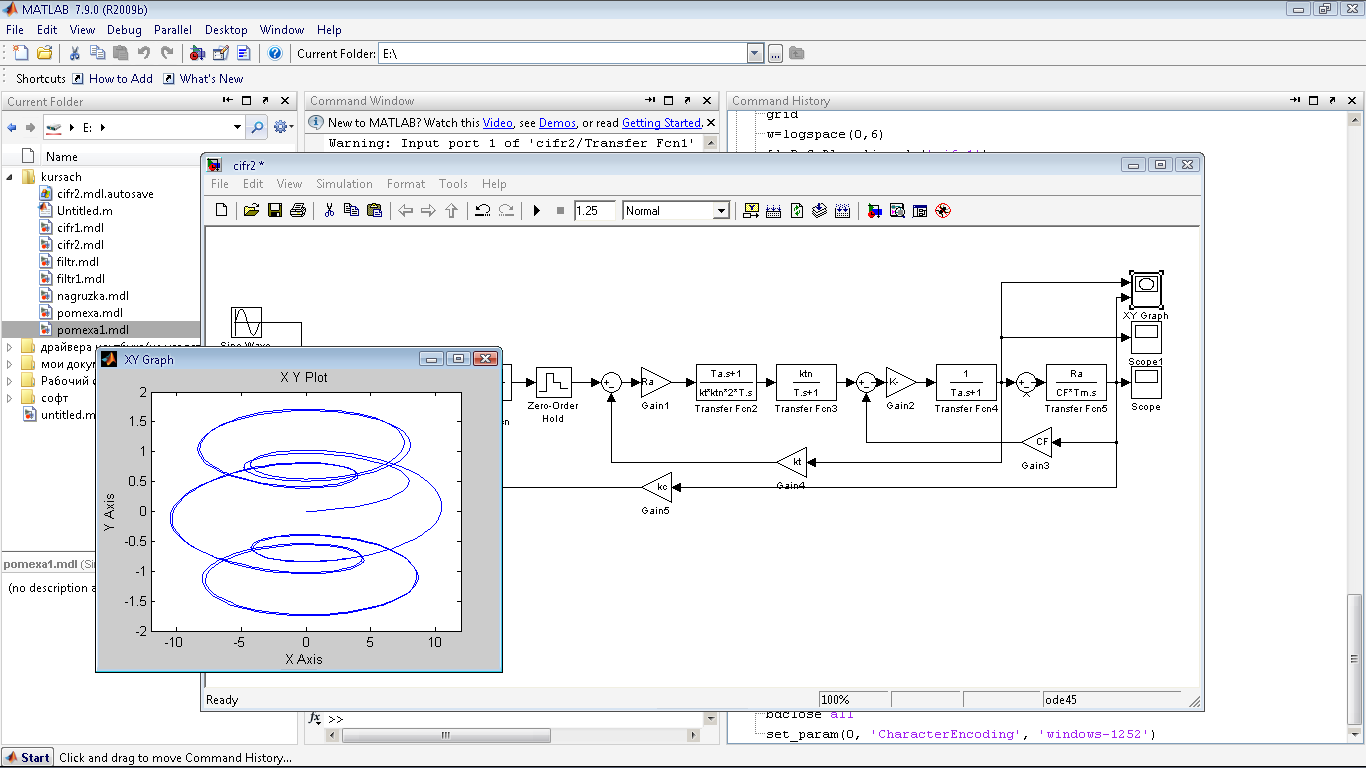
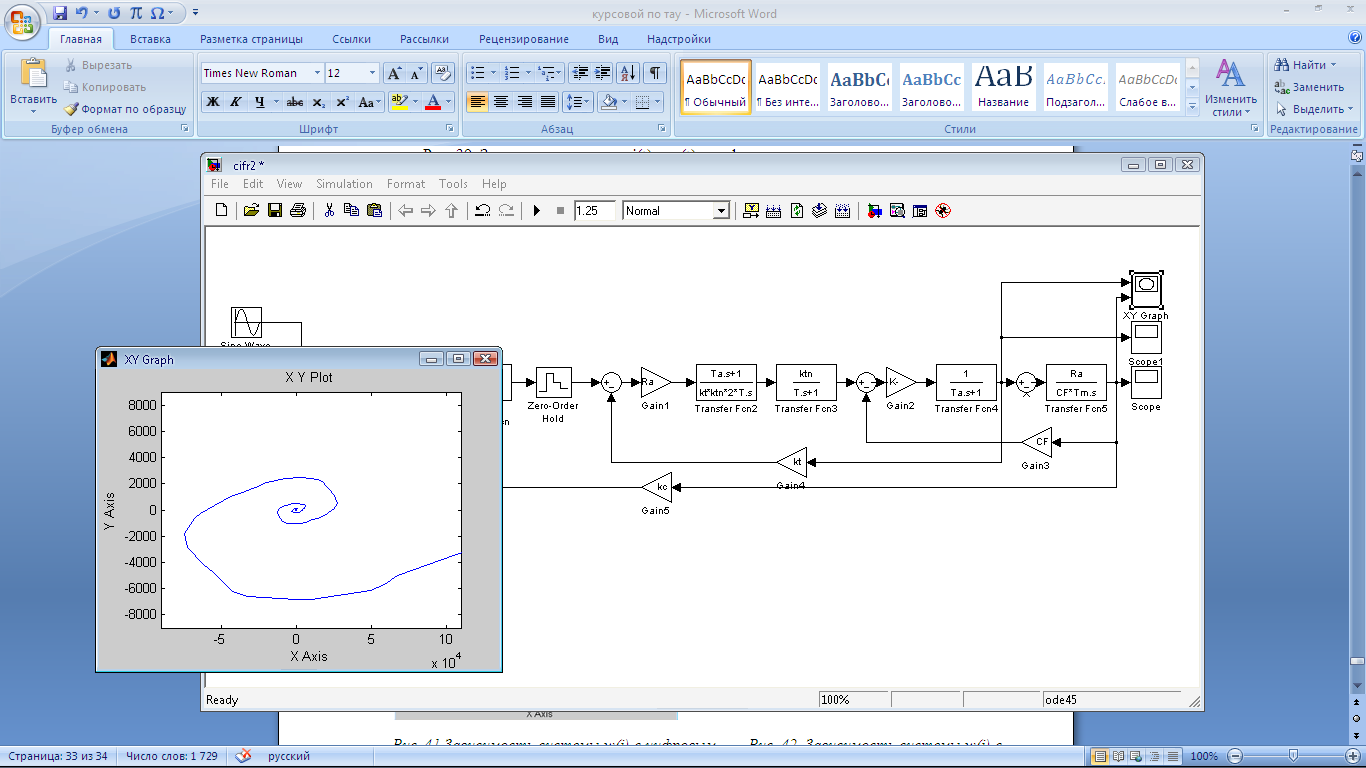
Рис.
41 Зависимость
 системы с Рис.42 Зависимость
системы с Рис.42 Зависимость системы
с
системы
с
цифровым регулятором скорости цифровым регулятором скорости
при T = 0.05*Ta с фильтром при T = 0.5*Ta с фильтром
10.1.5. Построение зависимостей ,,при подачи на вход помехи с фильтром

Рис.
43 Структурная схема для построения
зависимостей ,
, ,
, с
фильтром
с
фильтром
T = 0.05*Ta
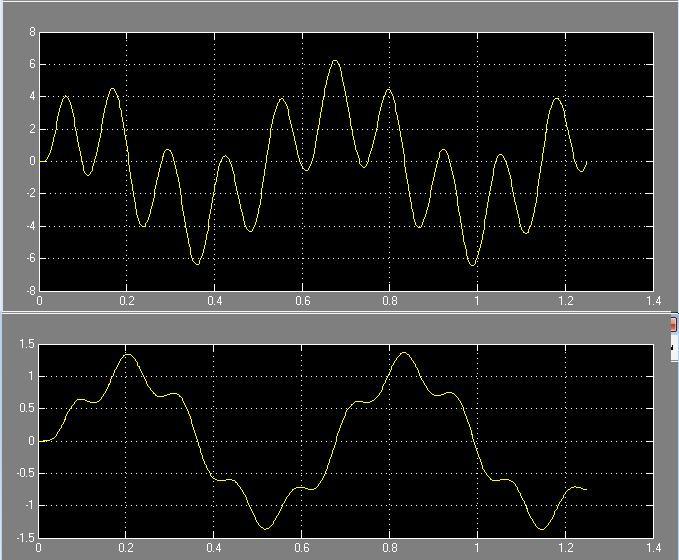
Рис. 44 Зависимость системы i(t) и w(t) с цифровым регулятором с фильтром
T = 0.5*Ta
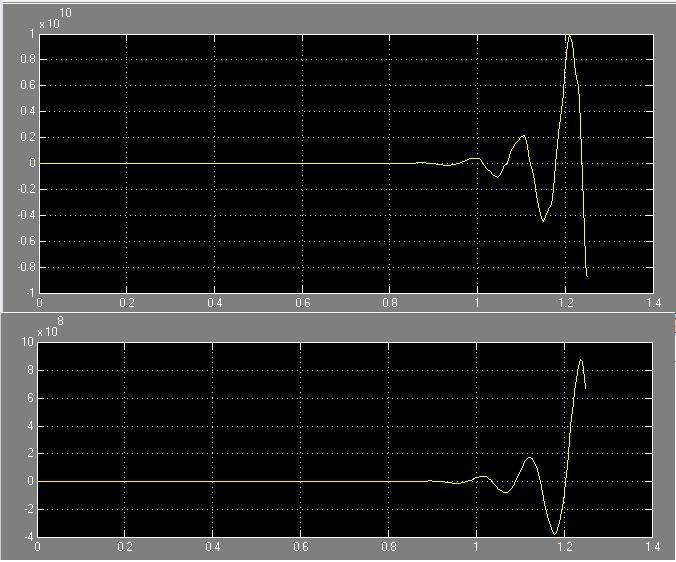
Рис. 45 Зависимость системы i(t) и w(t) с цифровым регулятором с фильтром

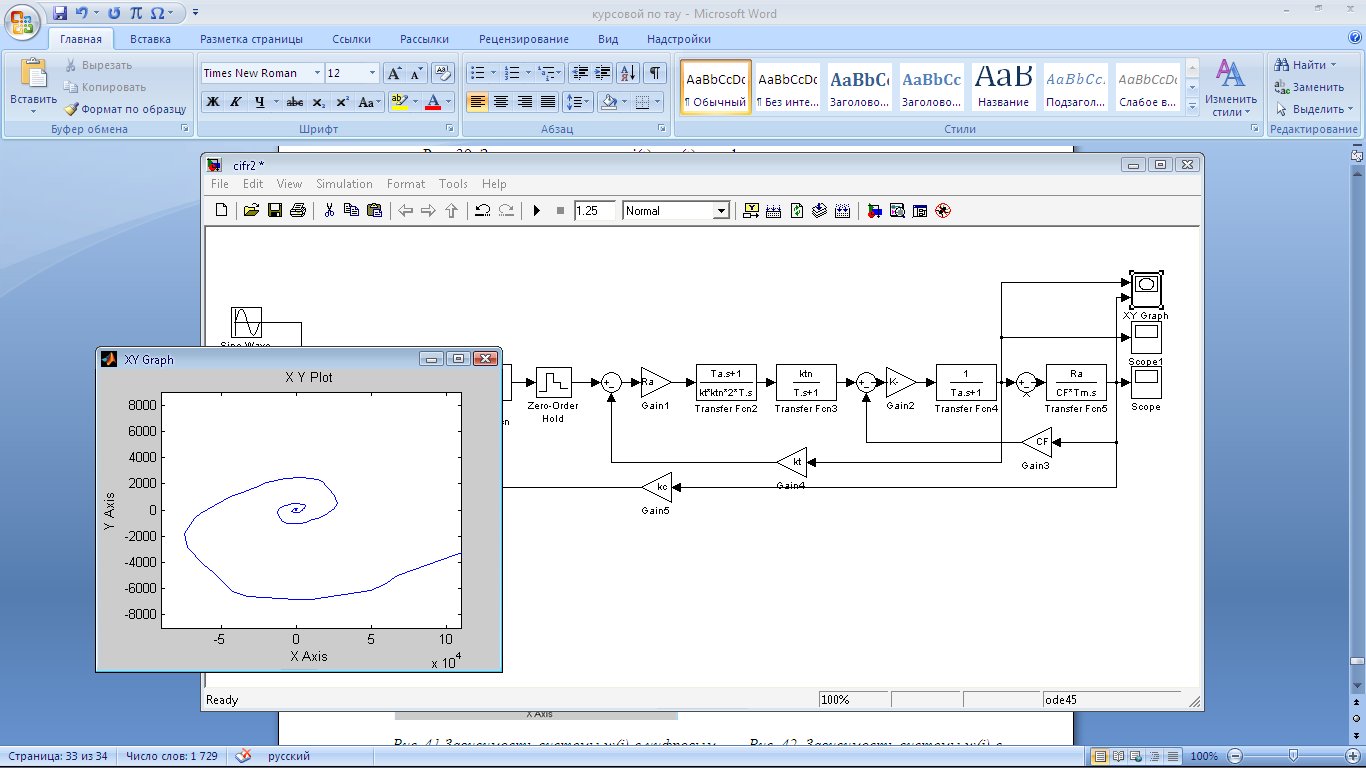
Рис.
46 Зависимость
 системы с Рис.47 Зависимость
системы с Рис.47 Зависимость системы
с
системы
с
цифровым регулятором скорости цифровым регулятором скорости
при T = 0.05*Ta при T = 0.5*Ta
10.1.6. Определение коэффициента передачи
Численным методом
-
амплитуда основной гармоники:

-
амплитуда сигнала на выходе системы:

Т.о.
коэффициент передачи

По ЛАЧХ
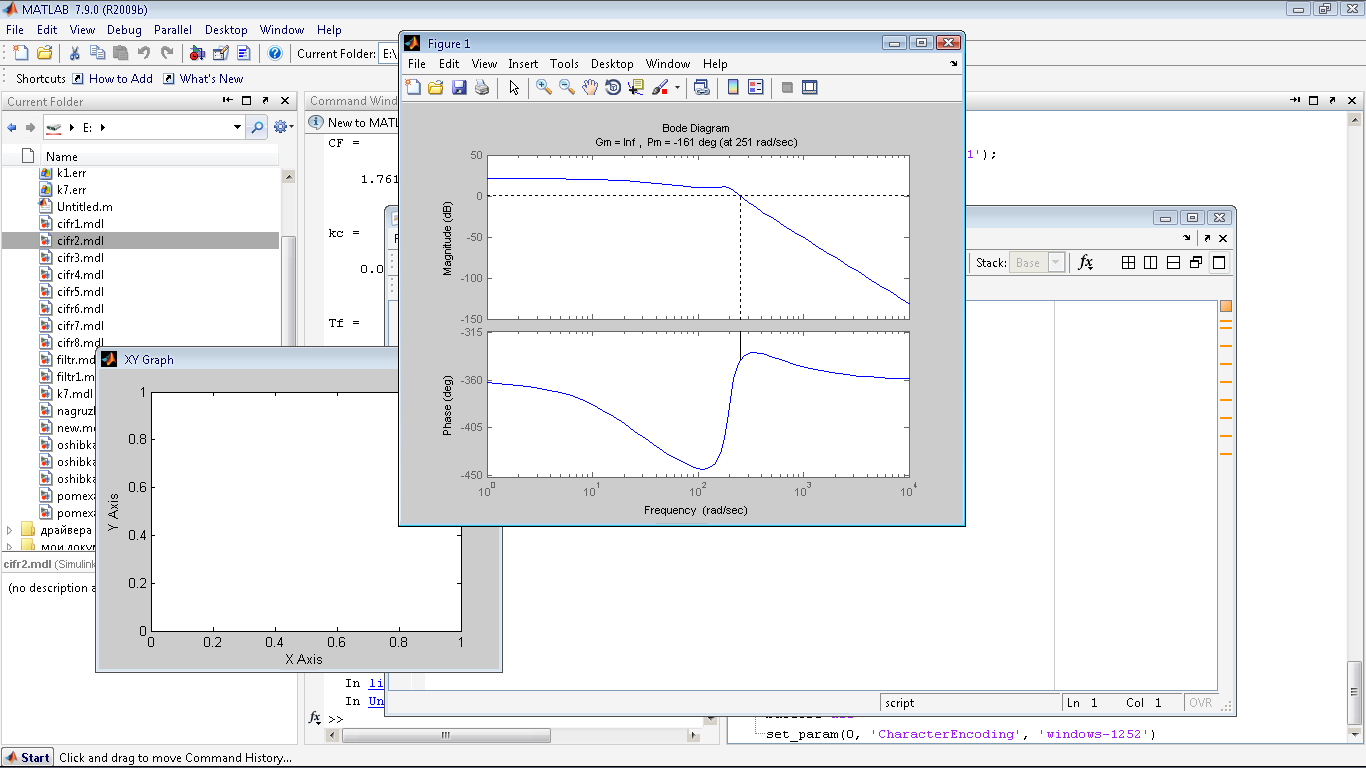
Рис. 21 ЛАЧХ
По
графику найдем L(w):
 ,
тогда коэффициент передачи
,
тогда коэффициент передачи
10.2. Билинейные преобразования
10.2.1. Найдем запасы устойчивости по амплитуде и по фазе

Рис. 50 Структурная схема для определения запасов
T = 0.05*Ta
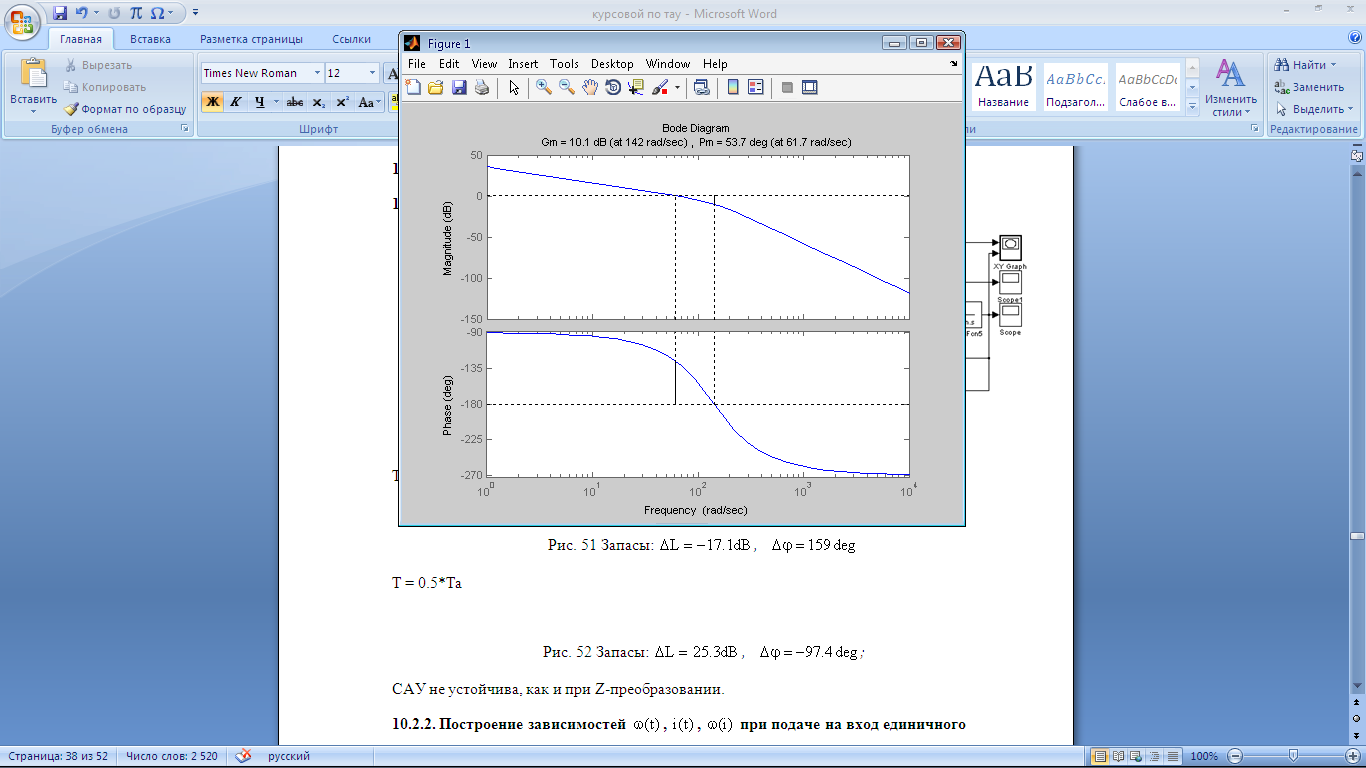
Рис.
51 Запасы:
 ,
,
T = 0.5*Ta
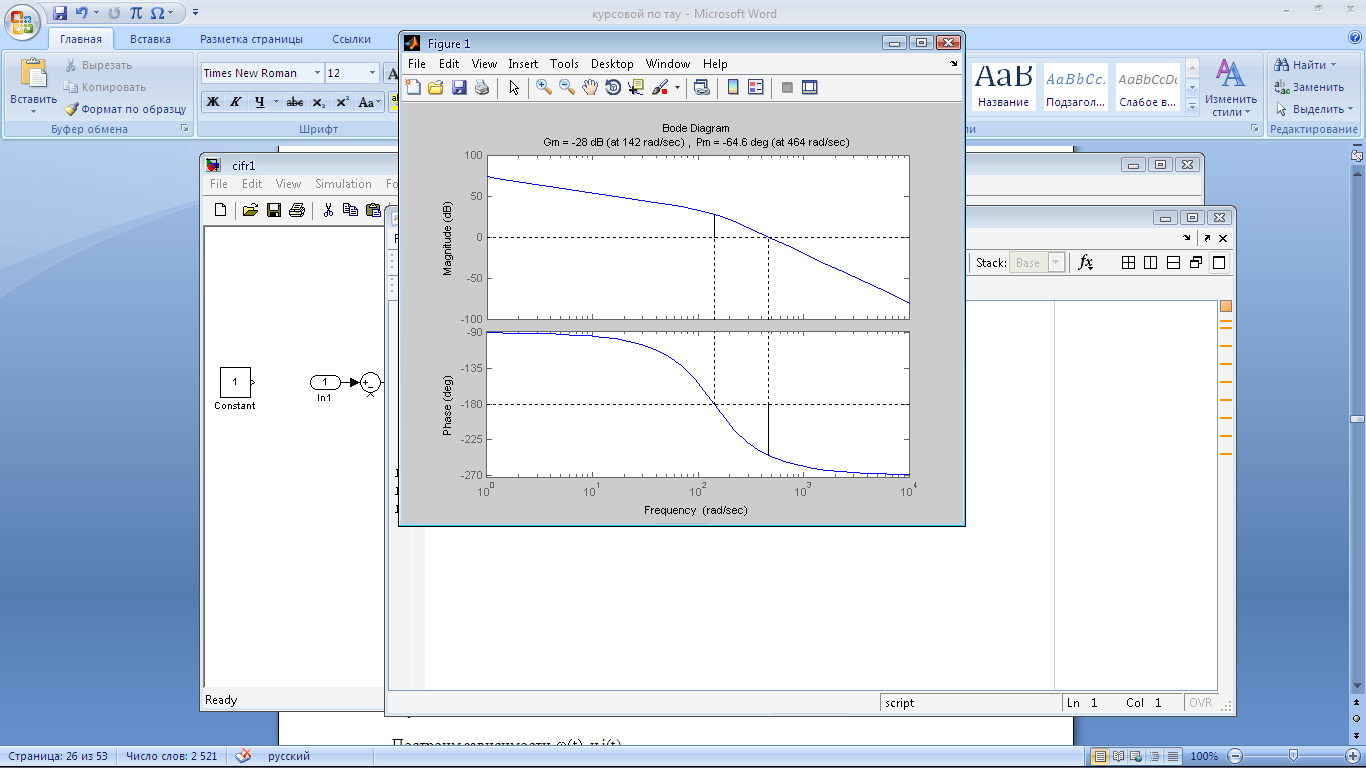
Рис.
25 Запасы:


 система
неустойчива
система
неустойчива
САУ не устойчива, как и при Z-преобразовании.
10.2.2. Построение зависимостей ,,при подаче на вход единичного ступенчатого сигнала
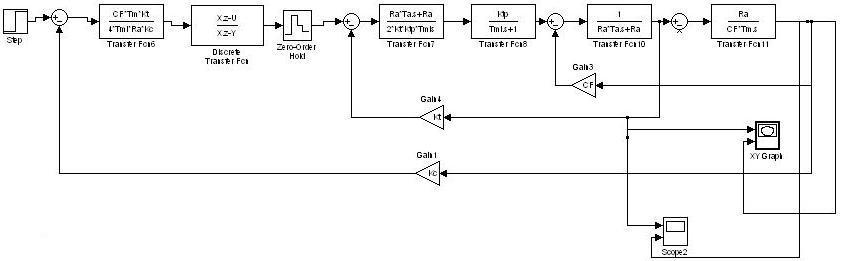
Рис. 53 Структурная схема
T = 0.05*Ta
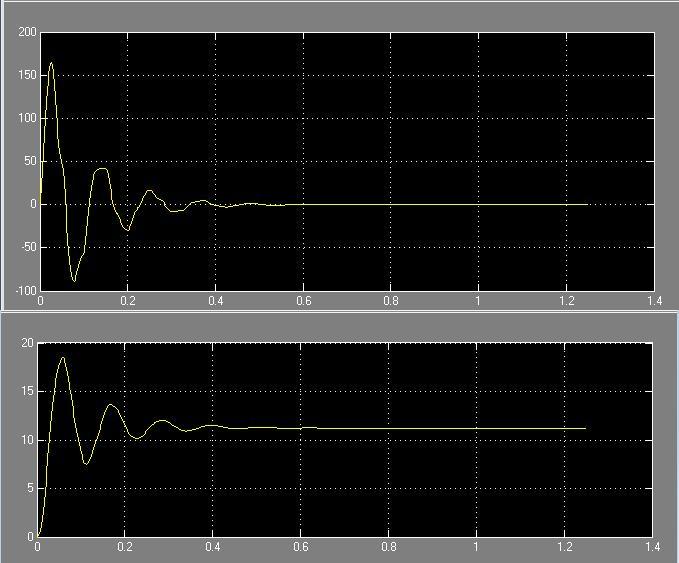
Рис. 54 Зависимость системы i(t) и w(t) с цифровым регулятором соответственно
Из графика можно определить получившиеся показатели качества:
-
перерегулирование:
-
время регулирования:

T = 0.5*Ta
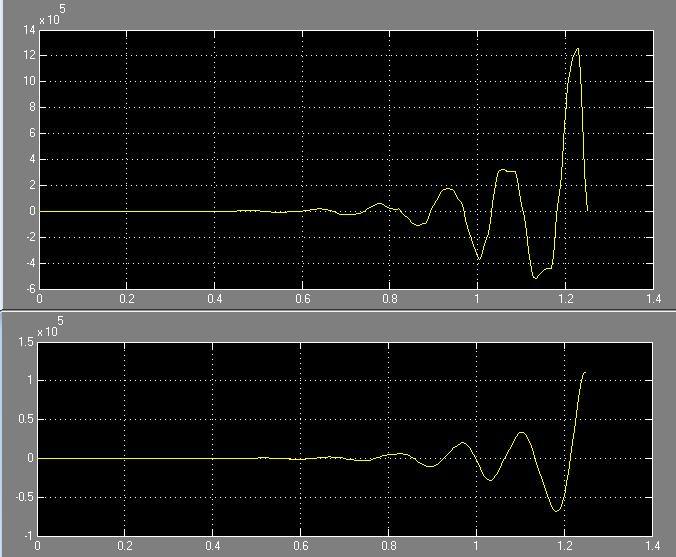
Рис. 55 Зависимость системы i(t) и w(t) с цифровым регулятором соответственно
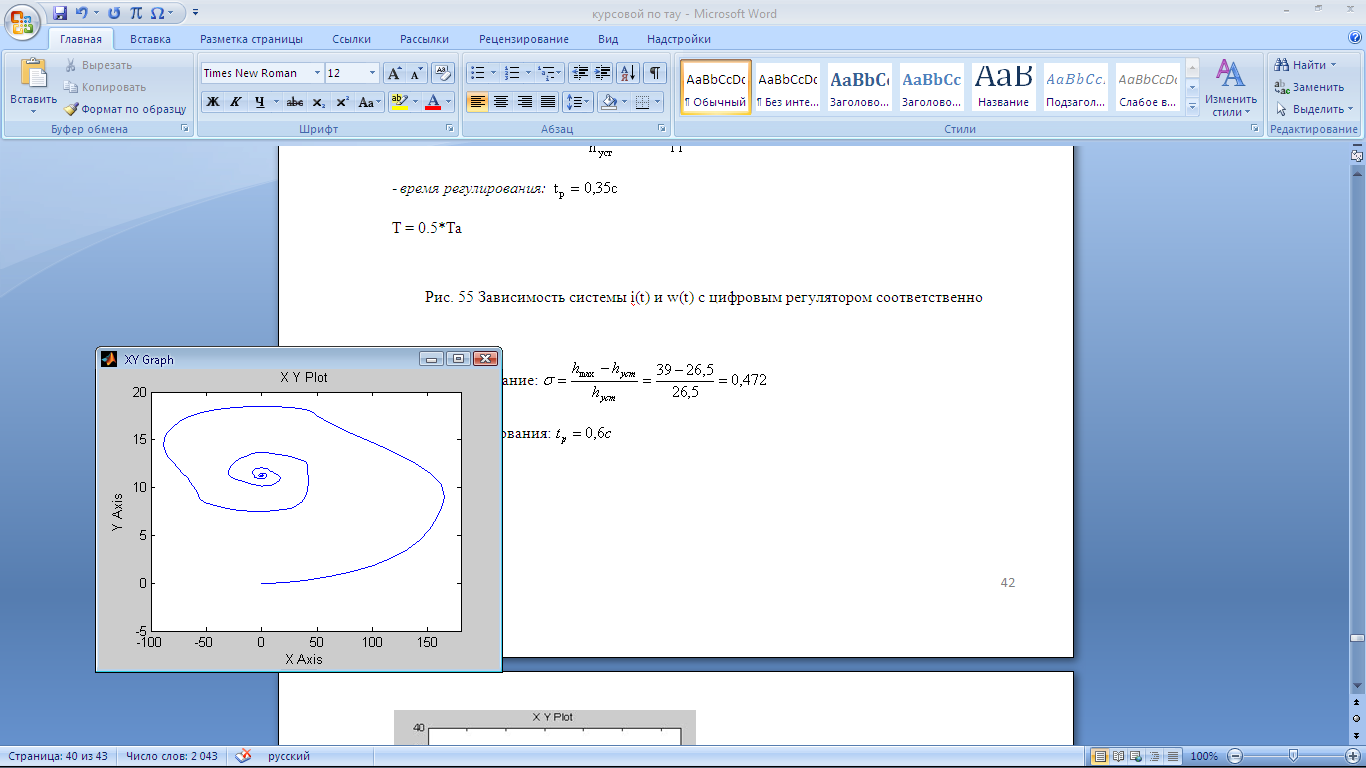
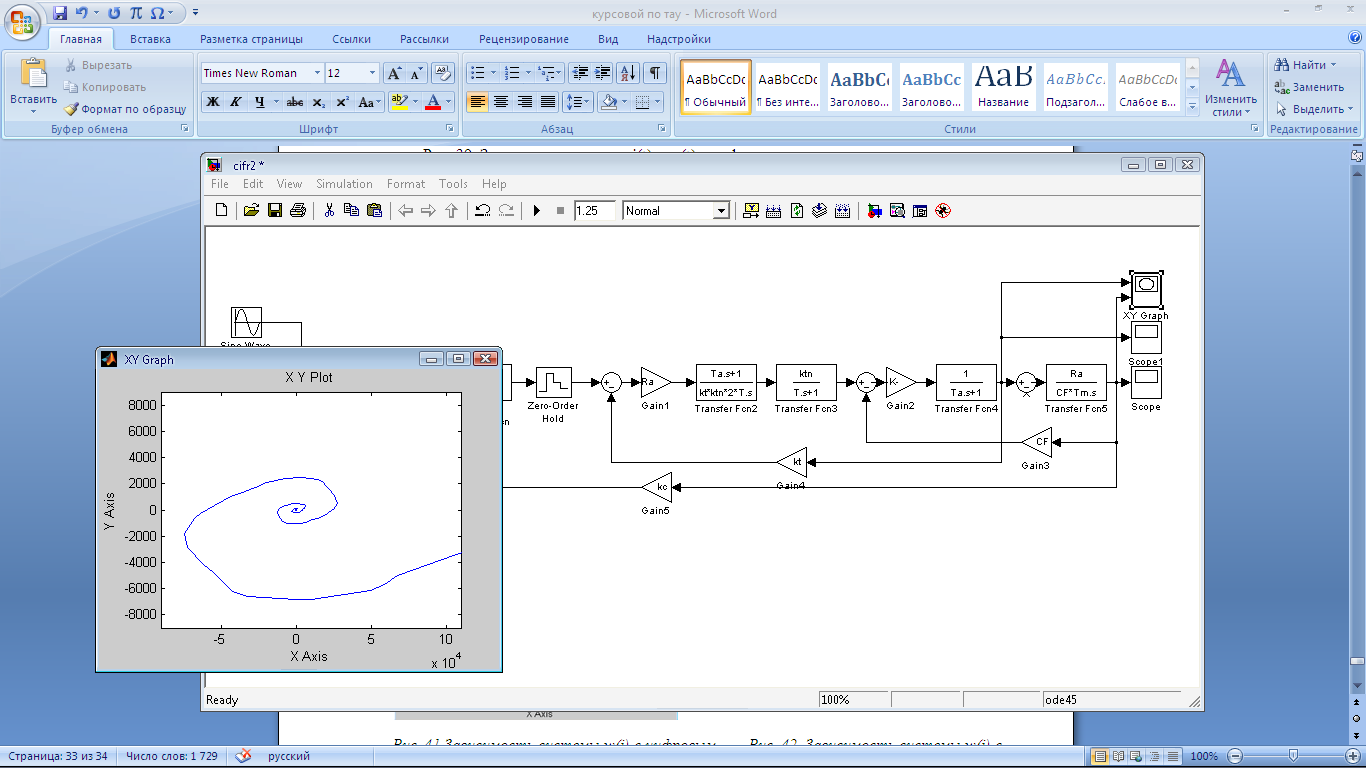
Рис.
56 Зависимость
 системы с Рис.57 Зависимость
системы с Рис.57 Зависимость системы
с
системы
с
цифровым регулятором скорости цифровым регулятором скорости
при T = 0.05*Ta при T = 0.5*Ta
Подтверждаем данными билинейными преобразованиями, что при Т=0.5Та система также неустойчива, как и при Z-преобразованиях.
Перерегулирование
больше требуемого, следовательно, нужно
поставить фильтр


T =0.05*Ta
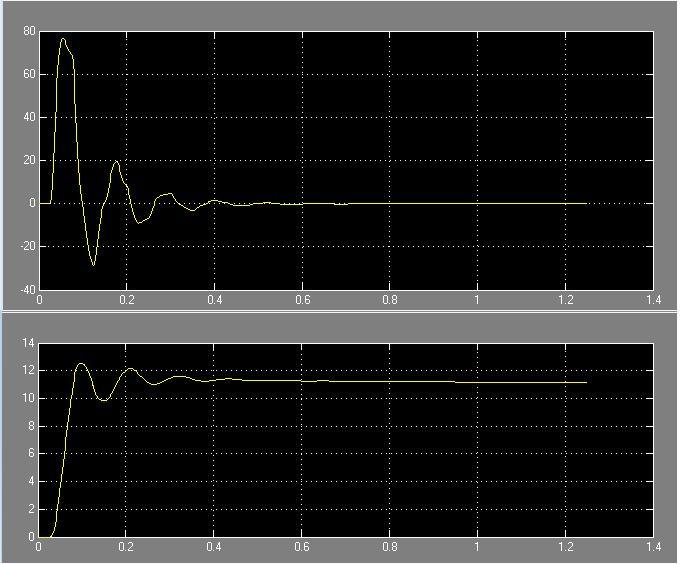
Рис. 58 Зависимость системы i(t) и w(t) с цифровым регулятором соответственно
-
перерегулирование:
-
время регулирования:

T =0.5*Ta
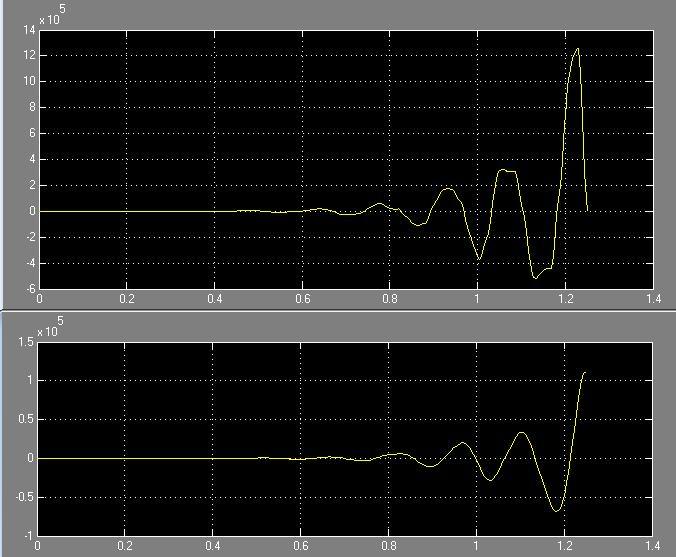
Рис. 59 Зависимость системы i(t) и w(t) с цифровым регулятором соответственно
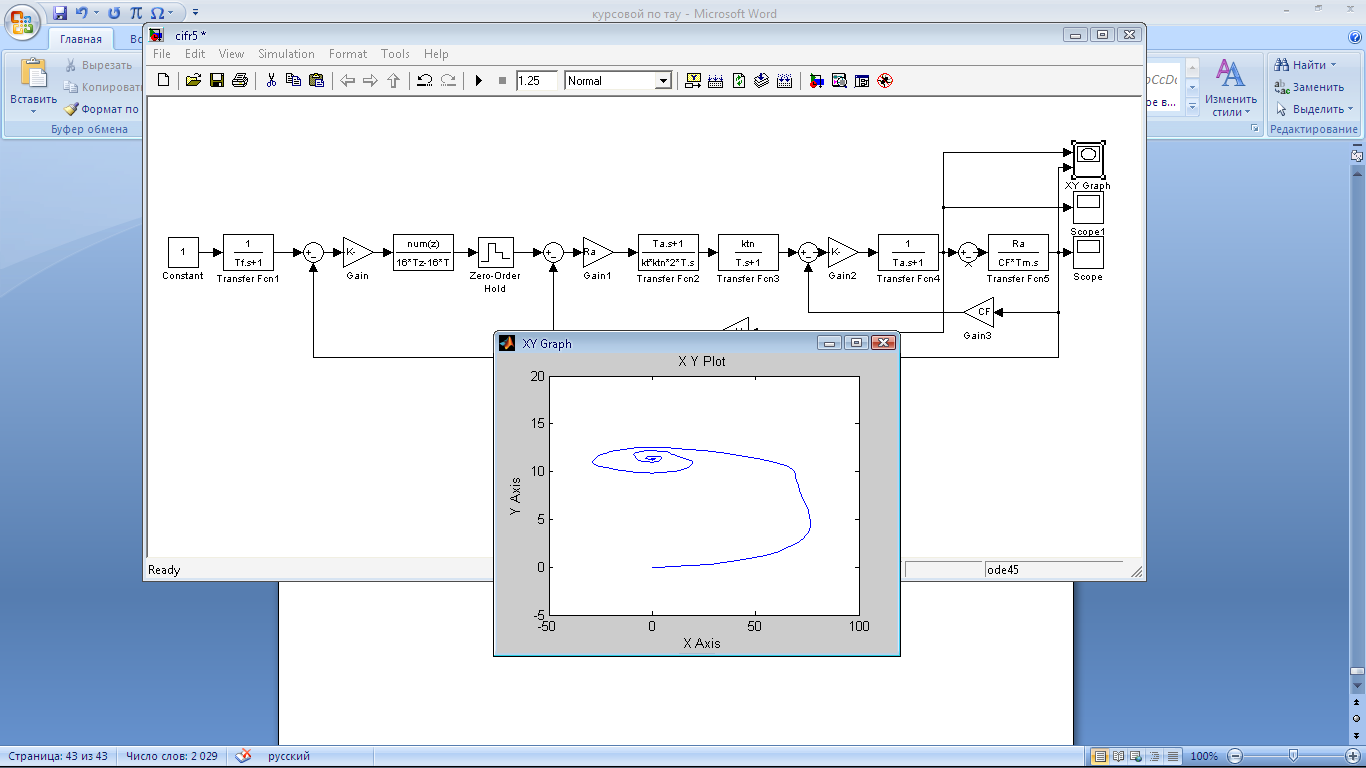
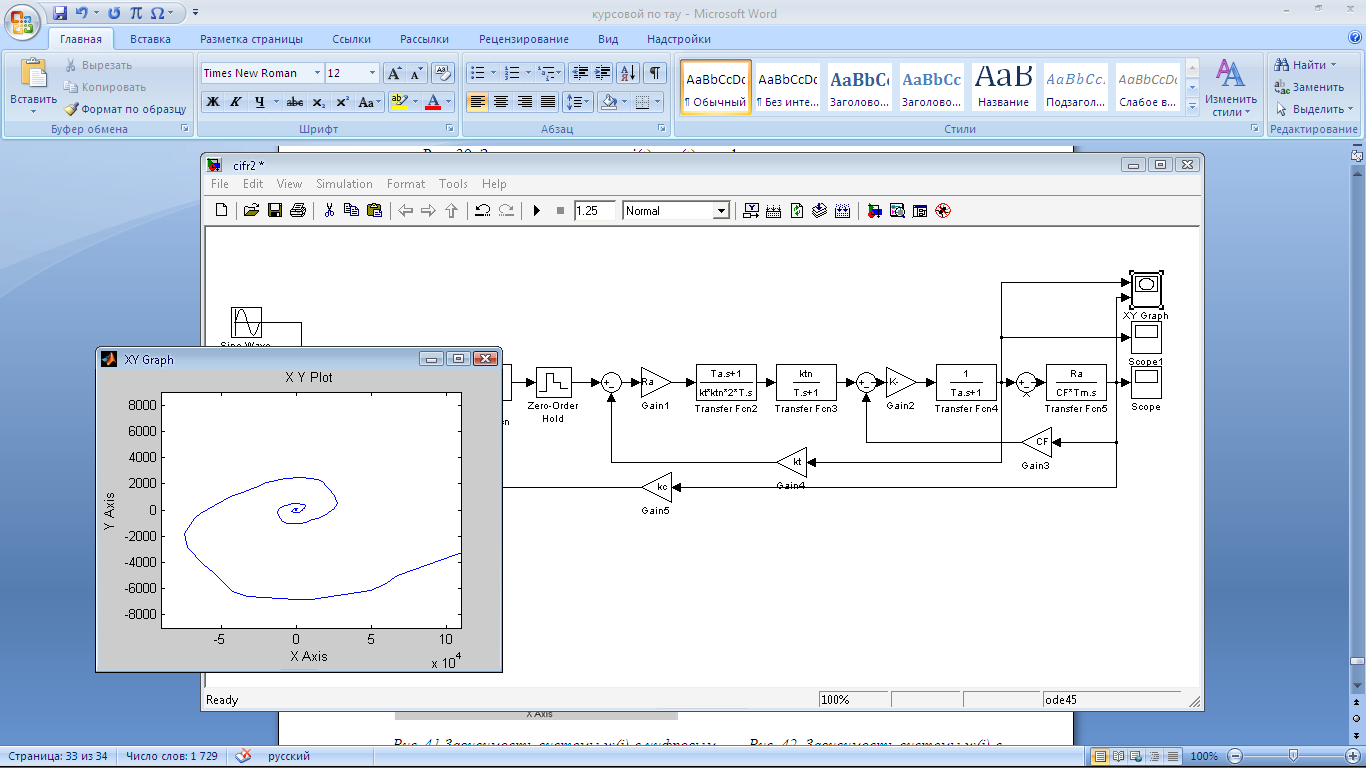
Рис.
60 Зависимость
 системы с Рис.61 Зависимость
системы с Рис.61 Зависимость системы
с
системы
с
цифровым регулятором скорости цифровым регулятором скорости
при T = 0.05*Ta при T = 0.5*Ta