

6. Расчет параметров заданной части сау
сопротивление без нагрева Ra,200 =0,95
коэффициент для машин с компенсационной обмотки: =0,25
Пересчитаем сопротивление при 20о в сопротивление при 75о


индуктивность
обмотки якоря:


электромагнитная
постоянная времени:
 с
с
механическая
постоянная времени:
 с.
с.
Синтез системы подчиненного регулирования
При синтезе САУ используем общепринятое упрощение, заключающееся в пренебрежении влиянием внутренней обратной связи по противоЭДС двигателя. В этом случае структурная схема заданной части будет представлять собой последовательное соединение типовых звеньев и датчики обратных связей. Количество контуров регулирования следует выбрать равным количеству обратных связей, т.е. трем. При синтезе регуляторов соответствующих координат электропривода (напряжения, приложенного к якорю двигателя; тока якоря; угловой скорости вращения) использовать стандартную процедуру синтеза регуляторов системы подчиненного регулирования. Синтез САУ завершается оценкой необходимости компенсации влияния существующей в модели двигателя обратной связи по противоЭДС на переходные и установившиеся режимы работы системы.
Т.о. структурная схема имеет вид:
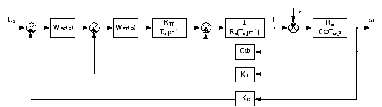
Рис. 5 Структурная схема САУ
7.1. Синтез регулятора тока
Синтез регулятора тока происходит без внутренней ОС по противоЭДС электродвигателя.
Передаточная функция разомкнутой системы имеет вид:


Рис. 6 Расчетная схема контура тока
Желаемая
передаточная функция разомкнутого
контура тока имеет вид:
.
Приравнивая
 ,
выражаем передаточную функцию регулятора
тока:
,
выражаем передаточную функцию регулятора
тока:

7.2. Синтез контура скорости
Расчет регулятора скорости ведем без учета нагрузки. Нагрузку будем учитывать при анализе системы
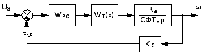
Рис. 7 Расчетная схема контура скорости
Желаемая разомкнутая функция регулятора скорости:

Реальная передаточная функция контура скорости:





В результате мы получили П – регулятор скорости. По заданию требуется обеспечить астатизм второго порядка по отношению к сигналу задания. Т. о. в качестве регулятора скорости применяем ПИ – регулятор со следующей передаточной функцией:
7.3 Компенсирующий сигнал
 – компенсирующий
сигнал.
– компенсирующий
сигнал.
 =
0,229
=
0,229
 =
0,041
=
0,041



Так как влияние обратной связи противоЭДС не сильное, то компенсирующий сигнал не используется.
8. Анализ системы подчиненного регулирования
Анализ системы подчиненного регулирования будем производить с помощью программы MATLAB 7.9
8.1. Определение запасов устойчивости системы

Рис. 8 Разомкнутая структурная схема САУ
Определяем запасы устойчивости по построенным частотным характеристикам (рис. 10).

Рис.
9 Запасы:
 ,
,

 ,
,

система устойчива.
система устойчива.
8.2 Построение зависимостей ,,при подаче на вход единичного ступенчатого сигнала

Рис.
10. Структурная схема для построения
зависимостей
 ,
,
 ,
,
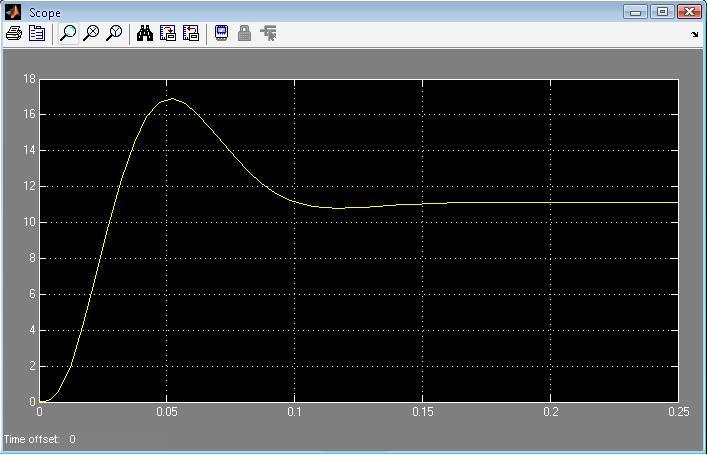
Рис 11. График переходной функции
Из графика можно определить получившиеся показатели качества:
-
перерегулирование
-
время регулирования

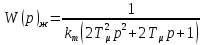
Сравнивая с техническим заданием, видим, что перерегулирование не удовлетворяет заданному, следовательно, необходимо поставить фильтр:
 где
где

Тогда график переходной функции будет иметь вид:

Рис 12. График переходной функции с фильтром
Откуда видно, что
-
перерегулирование
 .
.
-
время регулирования

Время регулирования получается больше, чем в задании, это может быть следствием слишком жестких требований, предъявляемых к приводу, поэтому время регулирования оставляем без изменений.
Построим
зависимости
 иw(t)
иw(t)

Рис.
13. Зависимости
 иw(t
) соответственно
иw(t
) соответственно
Построим
зависимость

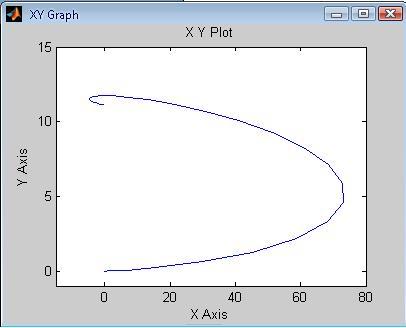
Рис 14. Динамическая электромеханическая характеристика