Глава 4. Розрахунок елементів схеми стенда.
Дослідимо мостову схему постійного струму, що перебуває у рівновазі, проведемо розрахунок чутливості моста по потужності, визначимо залежність вихідного сигналу незрівноваженого моста від зміни активного опору в одному з плеч моста.
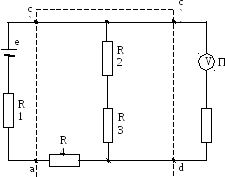
Під умовою рівноваги мостової схеми вважають таке співвідношення параметрів схеми (плеч моста), яке відповідає відсутності відхилення стрілки приладу, тобто відсутності струму у вимірювальній діагоналі. При кінцевому опорі гальванометра струм у вимірювальній діагоналі може бути рівний нулю тільки коли рівні нулю потенціали між вершинами цієї діагоналі, тобто між точками cтаd, (Рис.4.1.). В свою чергу умоваUcd=0 відповідає рівності падіння напруги в плечах моста відповідно в першому та четвертому або у другому та третьому, тобто:
![]()
![]() або
або
![]() (4.1.)
(4.1.)
}
![]()
![]()
![]()
![]() (4.2.)
(4.2.)
Підставивши вираз (4.2.) в (4.1.) та поділивши почленно одне на друге, отримаємо класичну умову рівноваги мостової схеми, математичний вираз якої може бути представлений формулами:
}
![]()
![]() (4.3.)
(4.3.)
![]()
Виконуємо розрахунок чутливості моста по потужності. Для розрахунку поставленої задачі скористаємося методом електрорушійних сил (ЕРС), основаного на відомій теоремі компенсації, яка формулюється так: “ Збільшення опору у будь-якій гілці викликає таку ж зміну струмів у всіх гілках розглядаємого ланцюга, яке викликало б введення в цю гілку (послідовно з вимірювальним опором) джерела ЕРС, рівного добутку, взятому з протилежним знаком, з попередньо протікаючим струмом на вимірювальному опорі ”.
a

R2
Рис.4.1. При кінцевому опорі гальванометра струм у вимірювальній діагоналі може бути рівний нулю тільки коли рівні нулю потенціали між вершинами цієї діагоналі, тобто між точками cтаd.
В відповідності з
цією теорією поява невеликого струму
у гілці нуль індикатора попередньо
зрівноваженого моста, викликаного
зміною вимірювального опору R1
на малу величинуR(Рис.4.2.), можна розглядати як результат
введення у зрівноважену схему послідовно
зR1 деякої еквівалентної
ЕРС, рівної -![]() (Рис.4.2.).
(Рис.4.2.).
Тут I1-старе
значення струму у плечі зR1,
яке приймається невідомим. У результаті
ми приходимо до еквівалентної схеми
(Рис.4.3.) з двома джерелами ЕРС Е0тае, при чому її опори
задовольняють співвідношення![]() . В наслідок цього режим генеральної
діагностики не впливає на струм в
індикаторі. Тому генераторна
діагональ може
бути взагалі
відкинута, а еквівалентна
схема в
. В наслідок цього режим генеральної
діагностики не впливає на струм в
індикаторі. Тому генераторна
діагональ може
бути взагалі
відкинута, а еквівалентна
схема в
ц ьому
випадку приймає вигляд, приведений на
Рис.4.3. По характеру схеми видно, що
питання про найбільшу чутливість моста
по потужності зводиться до питання про
максимум потужності отриманої
навантаженнямRпвід генератора е(R1) через
чотирохполюсник a
c` c``d
.
ьому
випадку приймає вигляд, приведений на
Рис.4.3. По характеру схеми видно, що
питання про найбільшу чутливість моста
по потужності зводиться до питання про
максимум потужності отриманої
навантаженнямRпвід генератора е(R1) через
чотирохполюсник a
c` c``d
.
![]() (4.4.)
(4.4.)
Якщо потужність розсіювання в плечі R1рівна
![]() ,
,
тоді
![]()
Замінивши I1отримаємо:
![]() , (4.5.)
, (4.5.)
де
![]()
![]() -
відносна зміна опору в плечі зR1.
-
відносна зміна опору в плечі зR1.
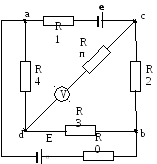
Рис.4.2.
результат введення у зрівноважену схему
послідовно з R1 деякої
еквівалентної ЕРС, рівної -![]()
Rп
Рис.4.3.
результат введення у зрівноважену схему
послідовно з R1 деякої
еквівалентної ЕРС, рівної -![]()
Із схеми видно, що потужність Pпдосягає максимального значення (Pп)max=P0при виконанні умови:
R4=0
R2+R3=![]() Rп=R1
Rп=R1
Для повністю симетричного рівноплечого моста:
![]() (4.6.)
(4.6.)
Чутливість схеми:
![]() (4.7.)
(4.7.)
Вибираємо параметри моста:
R1=R2=R3=R4=2Ом
Струм у плечі:
І=2.5 А
Rберемо з таблиці технічних характеристик електромагнітних реле типу ТКЕ; ТДЕ; ПНЕ; СПЕ;ТВЕ.

![]() Ом
Ом
Тоді
![]() Вт
Вт
Резистори вибираємо
типу С5-16 мв, Ррозс=5 Вт. Номінальним
опором 2 Ом, з похибкою![]() %.
%.
Розглянувши питання чутливості мостової схеми, ми впевнились, що якщо зрівноважений міст вивести із стану рівноваги шляхом зміни опору одного з плеч, то в індикаторі з’явиться струм, величина якого буде пропорційна відносному приросту змінившогося плеча та напрузі, підведеної до схеми. Якщо ми приймемо, що основне значення плечового опору, відповідаючого умові рівноваги, та напруга, що живить схему, залишаться величинами постійними, то ми можемо рахувати, що струм рівноваги пропорційний абсолютному приросту опора. Звідси слідує, що якщо існує така залежність, то у результаті відпадає необхідність в зрівноважуванні мостової схеми. Величина приросту опору плеча може бути визначена безпосередньо по показам гальванометра в індикаторній діагоналі.
Ця ідея й лежить в основі спеціального типу мостових схем, отримавших назву не зрівноважених. Однак необхідно підкреслити, що так як відхилення індикатора пропорційно не опору плеча, а тільки його абсолютному приросту, не зрівноважені мости використовуються тільки у тих випадках, коли нас цікавить саме приріст (зміна) деякого параметра, а не весь параметр в цілому. Однак необхідно згадати, що при аналізі чутливості ми приймаємо що R<<R. При цій умові ми й отримуємо доволі зручну для нас лінійну залежність:
Iп=f(R)
При аналізі чутливості поблизу точки рівноваги таке допущення безперечно повністю закономірне. Але, так як ми маємо намір використовувати не зрівноважений міст, як засіб вимірювання в більш чи менш значних інтервалах зміни R, то функціяIп=f(R) не буде підкорятися лінійному закону. Степінь цієї не лінійності як і нахил градуювальної кривої, тобто чутливість схеми, являється дуже важливою характеристикою не зрівноважених мостових схем.
З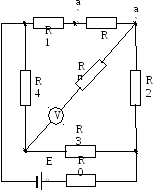
 найдемо
розрахунковим шляхом залежність струму
в індикаторі від зміни опору одного з
плеч. Після зміниRв плечі
(Рис.4.4.) у діагоналі з’явиться струм Іп.
найдемо
розрахунковим шляхом залежність струму
в індикаторі від зміни опору одного з
плеч. Після зміниRв плечі
(Рис.4.4.) у діагоналі з’явиться струм Іп.
Рис.4.4.Зміна опору одного із плеч.
 (4.8.)
(4.8.)
де
![]()
![]()
Вираз (4.8.) приведемо до вигляду:
![]() ,
(4.9.)
,
(4.9.)
д
}![]()
(4.10.)
![]()
![]()
І з
виразу (4.9.) видно, що всі значення, які
входять вa
та b
для заданого моста постійні. Таким
чином, величина струму в зазначеній
діагоналі являється функцією тільки
опоруR. ЗалежністьIп=f(R)
зображена на Рис.4.5.
з
виразу (4.9.) видно, що всі значення, які
входять вa
та b
для заданого моста постійні. Таким
чином, величина струму в зазначеній
діагоналі являється функцією тільки
опоруR. ЗалежністьIп=f(R)
зображена на Рис.4.5.

Рис.4.5. Залежність Iп=f(R)
У випадку одного
перемінного плеча, характер цієї
залежності буде однаковий для будь-якого
моста. Дійсні значення кривої визначаються
величиною
![]() та всіма параметрами моста.
та всіма параметрами моста.
Практичну цікавість являє отримання найбільшої чутливості, тобто максимальне значення кута - нахилу дотичної до кривої в точці 0 та найменше відхилення цієї кривої від прямої лінії, тобто мінімальне значення відрізкаEFабоE`F`. Із виразу (4.9.) знаходимо:
![]() (4.11.)
(4.11.)
Знаходження кута зводиться до визначення чутливості моста біля моменту рівноваги або так званої чутливості в нульовій точці. Позначимо її якS0 .
Припустимо, що у виразі (4.11.) R=0, тоді

![]() (4.12.)
(4.12.)
Після перетворень отримаємо слідуючий вираз:
(4.13.)
 ,
,
де
![]() -
вхідний опір схеми відносно a` a``.
-
вхідний опір схеми відносно a` a``.
Для повністю рівноплечого моста:
 (4.14.)
(4.14.)
 (4.15.)
(4.15.)
Таким чином, вираз (4.14) та (4.15.) дають нам все необхідне для розрахунку по формулі (4.13.) струму в індикаторі незрівноваженого рівноплечого моста.
При E![]() =U0
таR0=0
=U0
таR0=0
![]() (4.16.)
(4.16.)
![]() (4.17.)
(4.17.)
Відхилення кривої Iп=f(R) від закону прямої лінії визначає нам степінь нерівномірності шкали. Якщо рівняння дотичної Е Е` представити у вигляді:
![]() ,
(4.18.)
,
(4.18.)
то видно, що відрізок
EF=![]() -
-![]() дає нам абсолютне значення відхилення
від прямолінійності шкали у точціG. Позначимо відносну степінь нерівномірності
шкали через Д , тобто
дає нам абсолютне значення відхилення
від прямолінійності шкали у точціG. Позначимо відносну степінь нерівномірності
шкали через Д , тобто
![]() (4.19.)
(4.19.)
Підставимо вираз (4.18.) та (4.13.) у вираз (4.19.) отримаємо:
![]()
Таким чином, вираз (4.13.) для струму можна тепер записати у вигляді:
![]() (4.20.)
(4.20.)
Це рівняння являється кінцевим для визначення струму пристрою (індикатора). Як видно із формули (4.20.), струм залежить від чутливості в нульовій точці, степеня нерівномірності шкали та величини не рівноваги моста.
Таким чином, отримані всі необхідні формули для розрахунку моста та визначення його шкали. Як показав В.А.Петровський, отримані результати можна дуже зручно представити графічно у вигляді номограми, користуючись проектною побудовою.
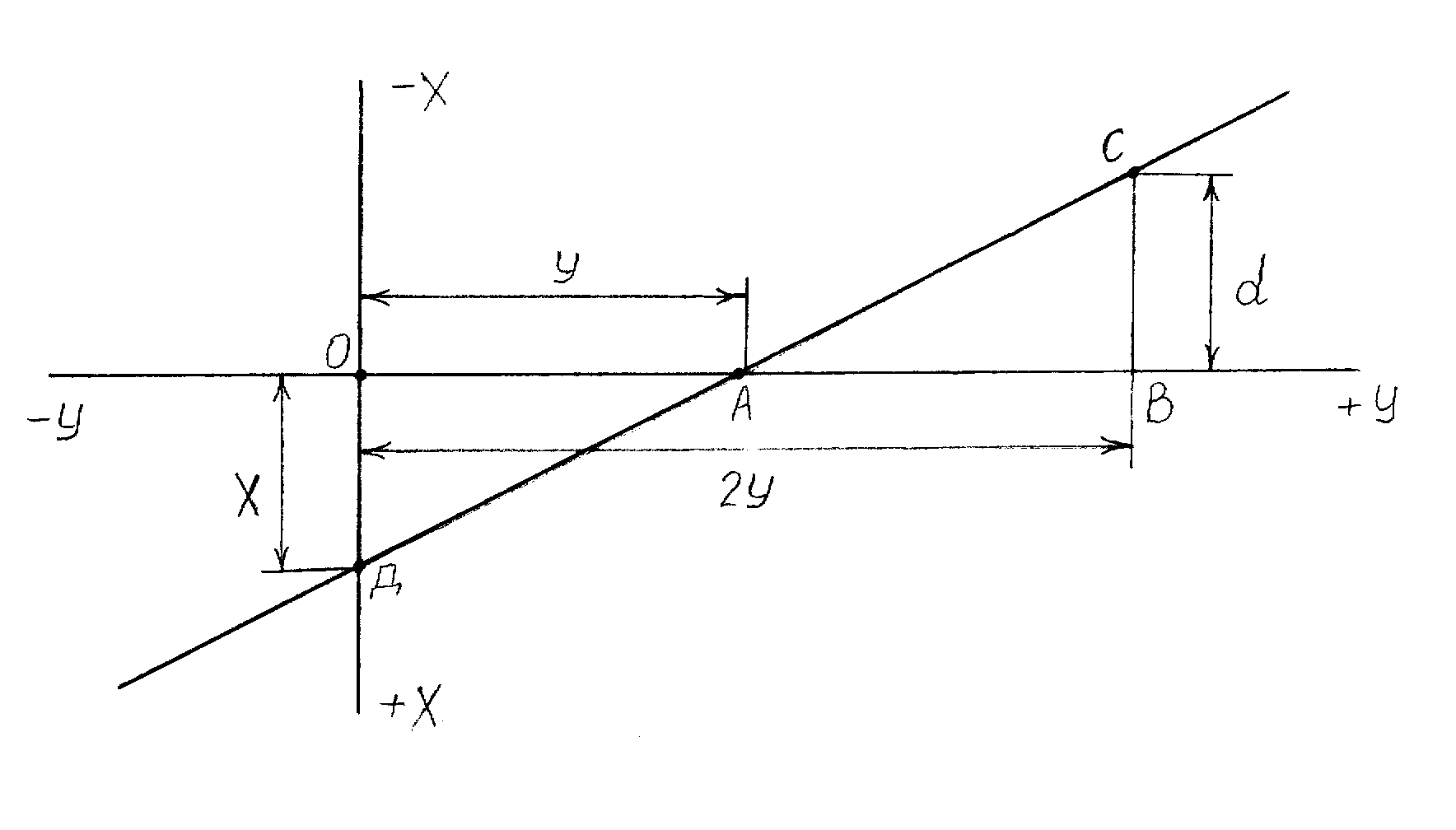
Рис.4.6 Номограмма, у системі координат
П ринцип
цієї побудови заключається в слідуючому:
якщо в прямокутній системі координат
(Рис.4.6.) провести з точки С (полюса) деяку
пряму та роздивитися два подібних
трикутника АОД та АВС, то можна записати
слідуючу пропорцію:
ринцип
цієї побудови заключається в слідуючому:
якщо в прямокутній системі координат
(Рис.4.6.) провести з точки С (полюса) деяку
пряму та роздивитися два подібних
трикутника АОД та АВС, то можна записати
слідуючу пропорцію:
![]() ,
,
звідки
![]() (4.21.)
(4.21.)
Порівнюючи вирази (4.13.) та (4.21.) можна побачити, що ці рівняння співпадають при
![]()
![]()
R
= X
![]()
Тобто, для визначення
характеру шкали незрівноваженого моста
(рахуємо, що шкала гальванометра
рівномірна) необхідно визначити значення
![]() (в Ом) та
(в Ом) та![]() (мА) . Ці значення будуть визначати
розташування полюса С (Рис.4.7.).
(мА) . Ці значення будуть визначати
розташування полюса С (Рис.4.7.).
Повертаючи пряму навколо полюса С (Рис.4.7.) в відповідності з заданим значенням R , знаходимо відповідне йому значення струмуIп. Точки перетину абсцис опору та ординат струму являються точками кривоїIп=f(R), що безпосередньопредставляють форму шкали не зрівноваженої мостової схеми.
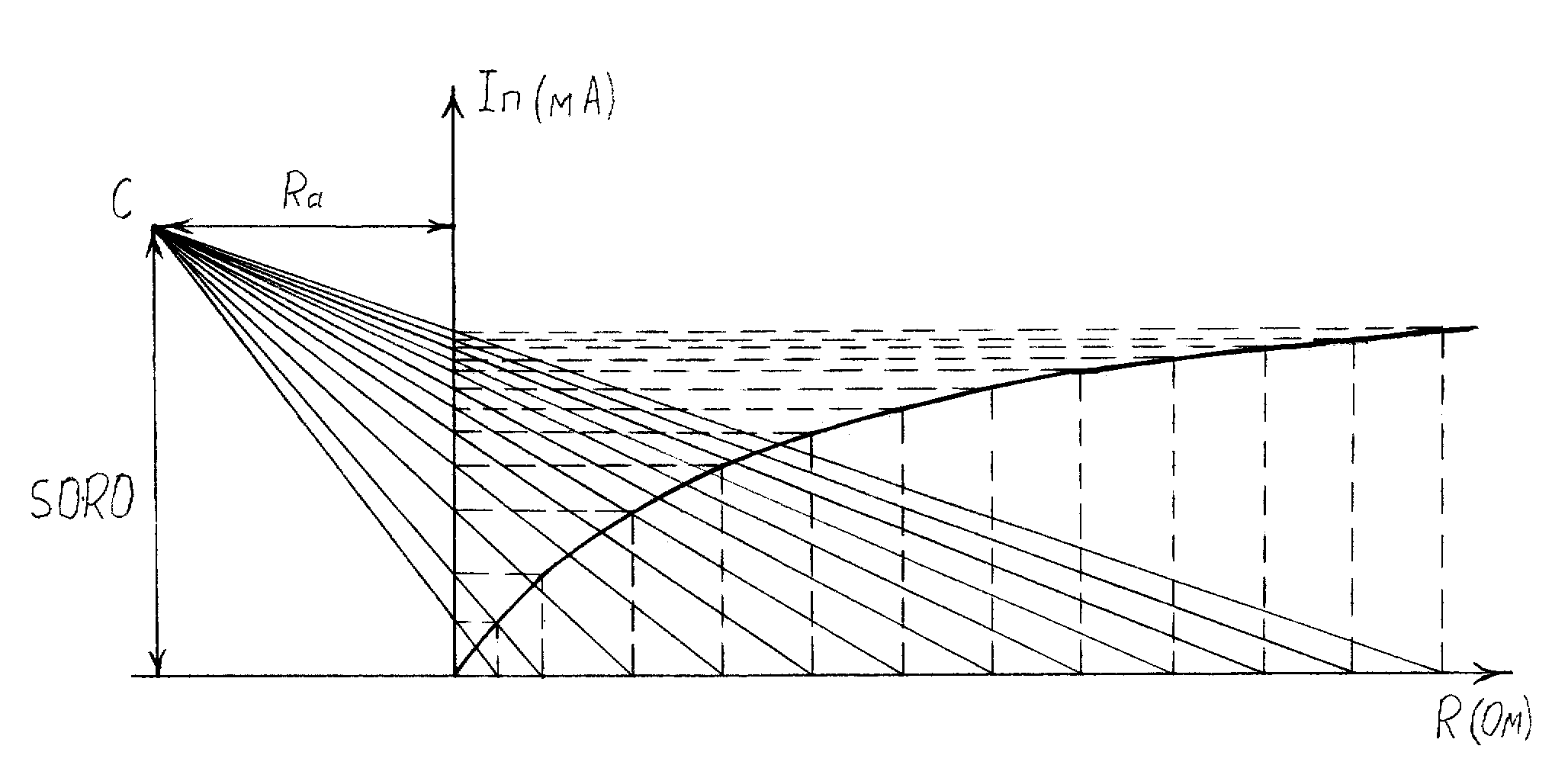
Рис.4.7.Форма шкали не зрівноваженої мостової схеми
Якщо позначити кут нахилу прямої до осі абсцис як , то цей кут буде визначати виключно чутливість в нульовій точці:
![]() .
.
При допомозі цієї монограми можна вирішити й зворотну задачу розрахунку схеми по заданій графічній кривій Iп=f(R).Для цього достатньо взяти дві точки на цій кривій, наприкладGтаH, побудувати прямокутникиAGBOтаDHEOтоді точка перетину їх діагоналей визначить місце розташування полюса С, яке в свою чергу відразу дозволить знайти величиниRAтаS0.
До цих пір ми не звертали уваги на те, що чутливість у нульовій точці та струм в індикаторі прямопропорційні напрузі живлення схеми Е0 (або U0).Тобто, шкала незрівноваженого моста буде незмінною тільки при умові, що живлення схеми буде постійним.
Для проектуємого стенда в якості електронно-обчислювальної машини (ЕОМ) візьмемо мікро ЕОМ типу К1816ВЕ48, що являє собою функціонально закінчену велику інтегральну схему, яка вміщує на одному кристалі всі необхідні для організації програмного на командному рівні обчислювального процесу: арифметико-логічний пристрій (АЛП), оперативно-запам’ятовуючий пристрій (ОЗП), постійно-запам’ятовуючий пристрій (ПЗУ) команд, запам’ятовуючий пристрій (ЗП) програм, багатоканальний інтерфейс введення-виведення, таймер-лічильник, векторну схему переривань, генератор тактових імпульсів з можливістю зовнішньої синхронізації, блок синхронізації та керування, внутрішні двонаправлені шини обміну даних.
Велика інтегральна схема серії К1816 розрахована на експлуатацію при слідуючих умовах:
- напруга живлення 50,5 В;
- розрядність оброблюємих даних 8;
- споживча потужність 600-750 мВт;
- робочий діапазон температур 10…+700С;
- ємність навантаження не більше 150 пФ;
- час зберігання інформації в запам’ятовуючому
пристрої (ЗП) програм при вимкненому
 джерелі живлення
25000 годин;
джерелі живлення
25000 годин;
- кількість циклів перепрограмування
запам’ятовуючого пристрою (ЗП) програм 25;
- об’єм запам’ятовуючого пристрою (ЗП) програм 1Кбайт;
- об’єм оперативно - запам’ятовуючого пристрою (ОЗП) 64 байт.
У великій інтегральній схемі передбачена можливість програмного розширення розрядності оброблюємих даних до 8 біт та апаратного розширення запам’ятовуючого пристрою (ЗП) програм до 4 Кбайт, оперативно запам’ятовуючого пристрою (ОЗП) до 384 байт, числа ліній введення-виведення інформації.
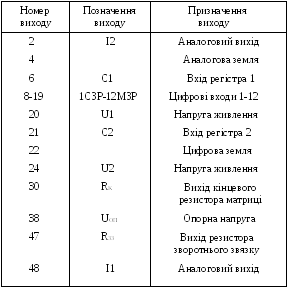
Умовне позначення великої інтегральної схеми К1816ВЕ48 показано на Рис.4.8.
Призначення виходів великої інтегральної схеми К1816ВЕ48 приведено у таблиці № 4.1.
Широкі можливості та функціональна закінченість великої інтегральної схеми К1816ВЕ48, сумісність по входам та виходам з мікросхемами ТТЛ, простота програмування та можливість перепрограмування дозволяють використовувати її в пристроях цифрової обробки інформації, не вимагаючи великої бистродії.
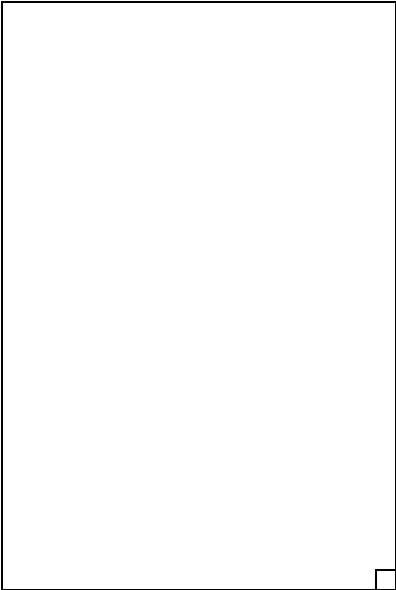
Рис.4.8. Велика інтегральна схема К1816ВЕ48.
Таблиця №4.1.Виходи великої інтегральної схеми К1816ВЕ48

Для роботи мікро ЕОМ необхідний аналогово-цифровий перетворювач (АЦП), вибір якого ми проводимо в даному розділі.
В якості АЦП візьмемо велику інтегральну
схему К1113ПВ1, що представляє собою
функціонально закінчений АЦП послідовного
наближення. Велика інтегральна схема
містить в собі вмонтоване джерело
опорної напруги, синхрогенератор,
компаратор, регістр послідовного
наближення та трьохстабільний буфер.
якості АЦП візьмемо велику інтегральну
схему К1113ПВ1, що представляє собою
функціонально закінчений АЦП послідовного
наближення. Велика інтегральна схема
містить в собі вмонтоване джерело
опорної напруги, синхрогенератор,
компаратор, регістр послідовного
наближення та трьохстабільний буфер.
Умовне позначення великої інтегральної схеми АЦП К1113ПВ1 показано на Рис.4.9.
Призначення виходів великої інтегральної схеми АЦП К1113ПВ1 приведено в таблиці № 4.2.
Основні електричні параметри експлуатації:
- напруга живлення +5В та –15 В;
- споживчий струм 10 та 18 мА;
- розрядність оброблюваних даних 10;
- час перетворення 30 мкс;
- напруга вхідного аналогово
однополярнаго сигналу 0…+10 В;
двополярного сигналу –5…+5 В;
- вхідний опір 5 кОм;
- абсолютна похибка 0.4;
- диференційна нелінійність від 0.1 до0.4.

Для формування ступінчатої зміни напруги на виході цифро-аналогово перетворювача, що необхідного для забезпечення працездатності стенда в режимі перевірки напруги зпрацювання та відпускання комутаційної апаратури, необхідний аналого-цифровий перетворювач. В якості такого АЦП візьмемо велику інтегральну схему К155ИЕ7, що являє собою функціонально закінчений АЦП дванадцятирозрядного лічильника.
АЦП К155ИЕ7 містить в собі вмонтоване джерело опорної напруги, синхрогенератор, компаратор, регістр послідовного наближення.
О сновні
електричні параметри експлуатації:
сновні
електричні параметри експлуатації:
- напруга живлення +5 В;
- споживчий струм 10 та 18 мА;
- розрядність оброблюваних даних 12;
- час перетворення 30 мкс;
- напруга вхідного аналогово
однополярного сигналу 0…+10 В;
двополярного сигналу –5…+5 В;
- вхідний опір 5 кОм;
- абсолютна похибка 0.4;
- диференційна нелінійність від 0.1 до0.4.
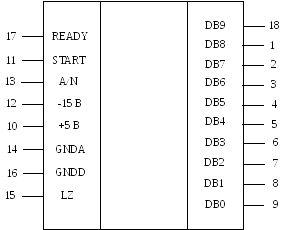
Рис.4.9. Велика інтегральна схема АЦП К1113ПВ1.
Таблиця №4.2.Виходи великої інтегральної схеми АЦП К111ПВ1

Для забезпечення працездатності стенда у режимі перевірки напруги зпрацювання та відпускання комутаційної апаратури необхідний цифро-аналоговий перетворювач.
В ізьмемо
цифро-аналоговий перетворювач (ЦАП)
побудований на великій інтегральній
схемі К572ПА2 Рис.4.10. Мікросхеми ЦАП
К572ПА2 являються універсальними
структурними елементами для побудування
мікроелектронних ЦАП, АЦП та керованих
цифровим кодом дільників струму. Вони
призначені для перетворення 12-розрядного
прямого двійкового коду на цифрових
входах в струм на аналоговому виході
який пропорційний значенням коду та
(або) опорної напруги.
ізьмемо
цифро-аналоговий перетворювач (ЦАП)
побудований на великій інтегральній
схемі К572ПА2 Рис.4.10. Мікросхеми ЦАП
К572ПА2 являються універсальними
структурними елементами для побудування
мікроелектронних ЦАП, АЦП та керованих
цифровим кодом дільників струму. Вони
призначені для перетворення 12-розрядного
прямого двійкового коду на цифрових
входах в струм на аналоговому виході
який пропорційний значенням коду та
(або) опорної напруги.
Велика інтегральна схема К572ПА2 складається більш ніж з тисячі елементів розміщених у герметичному металокерамічному плоскому корпусі з вертикальним розміщенням виходів.
Призначення виходів великої інтегральної схеми ЦАП К572ПА2 наведено у таблиці № 4.3.
Перетворювач розрахований на роботу від двох джерел живлення U1=5B5 таU2=15B5.


Рис.4.10. Велика інтегральна схема АЦП К1113ПВ1.
Таблиця №4.3Виходи великої інтегральної схеми ЦАП К572ПА2 .