

3.2.2. Системы шип - двигатель
Основным вариантом регулируемой системы постоянного тока в настоящее время становится система неуправляемый выпрямитель - ШИП - двигатель, построенная на транзисторах. Эта система обладает линейными механическими характеристиками, как система ГД, и позволяет регулировать скорость двигателя в широких пределах. При использовании специальных регуляторов в замкнутой системе удается получить диапазон регулирования скорости несколько тысяч [8].
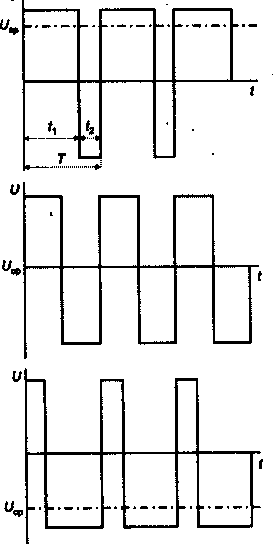
При широтно-импульсном управлении среднее значение напряжения якоря двигателя регулируется за счет изменения длительности (ширины) импульса tи при неизменном значении суммарного времени паузы и импульса Т= tи + tп, т. е. при необходимости регулирования скорости изменяется величина τ = = tи/T. Амплитуда импульса при этом сохраняется неизменной.
Существует ряд вариантов схем построения системы с широтно-импульсным управлением как с однополярными импульсами, так и с двуполярными. При использовании двухполярных импульсов (рис. 3.9) система с ШИП обеспечивает не только возможность регулирования скорости, но и реверс двигателя.
Системы с ШИП строятся как на основе использования транзисторов, так и тиристоров. Частоту импульсов для системы с ШИП на транзисторах выбирают около 5 кГц, на тиристорах не выше 1 кГц. Последнее обусловлено тем, что тиристоры в ШИП работают на постоянном токе и соответственно приходится использовать достаточно сложные схемы искусственного гашения тока за счет разряда конденсаторов, специально вводимых в схему. Соответственно ШИП на транзисторах существенно проще.
Транзисторы обычно включаются по схеме с общим эмиттером и работают в режиме насыщения. При этом обеспечивается высокий КПД. Однако иметь частоту свыше 5 кГц не рекомендуется, так как при этом возрастают потери. Следует заметить, что даже для транзисторов последних разработок
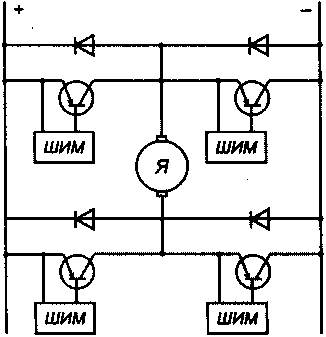
Рис. 3.9. Широтно-импульсный преобразователь с двухполярными
импульсами ШИМ - широтно-импульсный модулятор
верхний уровень частоты практически не изменился. Встречнопараллельно как транзисторам, так и тиристорам всегда включаются диоды для пропуска реактивного тока, чем исключается опасность возникновения повышенного напряжения.
Так как цепь якоря двигателя замкнута и меняется только длительность приложенного напряжения, а уровень его неизменен, то скорость двигателя может быть определена по среднему значению напряжения якоря двигателя:
![]()
где t1 и t2 - длительность положительного и отрицательного импульсов, т. е. импульсов при разгоне двигателя и при торможении.
Так как t1 + t2 = Т, то t2 = T – t1,


где rя - сопротивление цепи якоря, основную долю которого составляет сопротивление обмотки якоря двигателя.
При τ > 0,5 напряжение Uср > 0 и соответственно электрическая машина работает в режиме двигателя, вращаясь, скажем, в положительном направлении; при τ < 0,5 происходит торможение и реверс двигателя (рис. 3.10).
Рис. 3.10. Диаграмма работы
ШИП с двухполярными
импульсами в режиме реверса

практически только параметрами якоря самого двигателя.
В связи с этим система ШИП - двигатель, построенная на транзисторных элементах, становится основной системой управления двигателем постоянного тока. Единственным недостатком системы является использование дополнительного неуправляемого выпрямителя, необходимого как источник энергии постоянного тока. При наличии в цехе сети постоянного тока регулируемый привод с ШИП может быть подключен к этой сети и тогда необходимость в дополнительном преобразователе отпадает.
3.3. ПРЕОБРАЗОВАТЕЛИ В СИСТЕМАХ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА
3.3.1. СИСТЕМЫ АВТОНОМНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ -АСИНХРОННЫЙ ДВИГАТЕЛЬ
Вопросы теории и построения частотно-регулируемого привода с асинхронными двигателями были разработаны еще в середине двадцатого столетия, однако создание реальных приводов оказалось возможным только с появлением силовых полупроводниковых приборов - транзисторов.
Схема включения полупроводниковых приборов в автономном инверторе напряжения (АЙН) (рис. 3.12) аналогична схеме рис. 3.9. Однако, если при работе управляемого выпрямителя t ≠ t2 и лишь при нулевой скорости двигателя они равны, то теперь
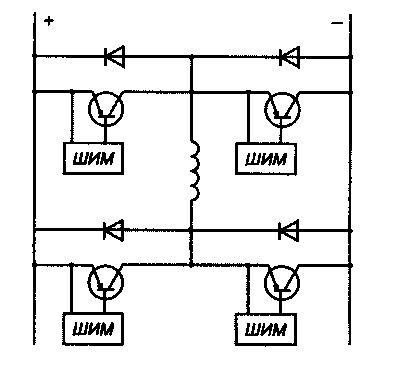
Рис. 3.12. Автономный инвертор напряжения (АЙН)
непременным условием является равенство t1, = t2 и сумма t1 + t2 = T представляет период волны напряжения переменного тока. Естественно, реальная форма кривой напряжения не будет представлять меандр, а получит несколько сглаженный характер, прежде всего, за счет тока, протекающего через обратный диод. Однако все же генерируемые нечетные гармоники достаточно велики и желательна их фильтрация. Параметры фильтра при этом не должны существенно повлиять на замедление процессов в приводе. Следует заметить, что при питании от АЙН асинхронного двигателя, обмотки которого соединены звездой или треугольником, некоторые гармоники запираются.
Для возможности регулирования уровня напряжения, питающего двигатель, в силу одного из законов поддержания требуемого соотношения между U и ƒ, инвертор должен подключаться к управляемому выпрямителю. В схеме, реализующей алгоритм управления приводом, следует обеспечить взаимосвязь между ƒ и U.
Для получения лучшей формы кривой напряжения в автономном инверторе часто используют широтно-импульсную модуляцию. Для этого как положительный, так и отрицательный полупериоды делятся на ряд участков, на которых вводится импульсный характер изменения напряжения. Обеспечивая различную ширину импульсов, можно получить требуемый характер формы кривой напряжения, в том числе приближающийся
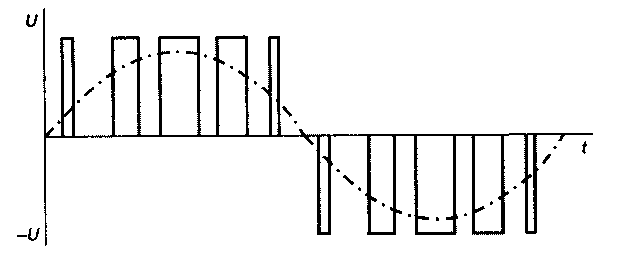
Рис. 3.13. Создание синусоидальной формы напряжения за счет широтно-импульсной модуляции
к синусоидальному (рис. 3.13). Увеличивая число импульсов на протяжении одного периода, можно существенно улучшить форму кривой напряжения.
Для торможения асинхронного двигателя в системе частотного управления, естественно, должен использоваться рекуперативный режим. Следует постепенно снижать частоту и соответственно снижать напряжение, но в схеме нет канала для возврата энергии. Для ее гашения иногда используют сопротивление (резистор), на которое через дополнительный транзистор замыкают силовые цепи АЙН. Однако при этом энергия бесполезно теряется, что в настоящее время при ограниченных ее ресурсах недопустимо. Также нерационально и подключение аккумулятора. Наиболее правильно использовать на входе системы два выпрямителя, из которых один должен работать в качестве инвертора при торможении двигателя, как в системе управляемый выпрямитель - двигатель постоянного тока.
При построении инвертора на тиристорах принципиальная схема остается неизменной, но дополнительно входят узлы принудительной коммутации тиристоров.