

1.2. Измерители скорости вращения
В современных позиционных и следящих системах в целях упрощения часто отказываются от использования специальных датчиков скорости. При этом информацию о скорости получают отдатчиков положения, фиксируя пройденный путь за единицу времени. Установка специального датчика скорости - тахогенератора усложняет и удорожает установку, требует дополнительной конструктивной проработки установки датчика. Следует, однако, отметить, что наличие тахогенератора облегчает построение качественной системы, упрощает средства коррекции, необходимые для обеспечения требуемых динамических свойств системы.
Двигатели некоторых серий снабжаются встроенными тахогенераторами [35]. При этом в обозначение типа двигателя, изготавливаемого в РФ, входит буква Т, например ПГТ, ПБСТ и др.
В электромеханических системах используются тахогенераторы как постоянного, так и переменного тока. И те и другие обладают как некоторыми достоинствами, так и недостатками. Сводка их дана в таблице. Обычно выбор рода тока для тахогенераторов не производится. В системах постоянного тока, как правило, используются тахогенераторы постоянного тока, в системах переменного тока - асинхронные. Для эффективного использования тахогенератора необходимо, чтобы он имел линейную характеристику Е =ƒ(ω) и большую ее крутизну, не вносил дополнительной помехи, имел малые габариты, массу и момент инерции.
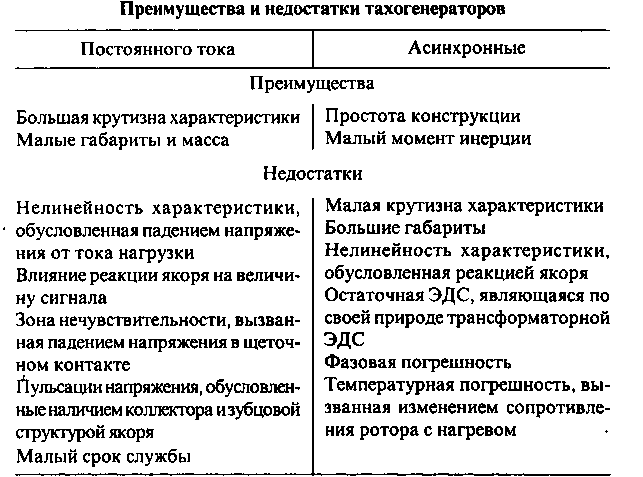
Наибольшую крутизну характеристики обеспечивают тахогенераторы постоянного тока - ТТП-60, 100 иТД-102, 103 - до 100 мВ/(об/мин). Для сравнения - у асинхронных тахогенераторов крутизна не превышает 10 мВ/(об/мин) (ТГ-4).
Возможно также построение тахогенератора на базе синхронного генератора. Недостатком его является зависимость частоты индуцируемой ЭДС от скорости, поэтому он либо используется совместно с выпрямителем, либо применяется в частотно-импульсных системах, в которых путь задается числом импульсов, а скорость соответственно определяется числом импульсов в единицу времени. Применение синхронных ТГ ограничено. При однофазном исполнении затруднено получение информации о направлении его вращения, а соответственно и двигателя. Синхронные ТГ, как встроенные, часто используются в вентильных двигателях, которые по своей конструкции тоже являются синхронными машинами.
ГЛАВА ВТОРАЯ
ВЫБОР ИСПОЛНИТЕЛЬНОГО ДВИГАТЕЛЯ
2.1. Выбор рода тока и типа двигателя
Исполнительные двигатели в позиционных и следящих системах могут быть пневматическими, гидравлическими и электрическими, однако преимущественное использование имеют последние, которым и будет уделено основное внимание. Пневматические двигатели иногда являются исполнительными органами в простейших сервосистемах, работающих, как правило, с разомкнутой цепью. Например, они применяются в роботах малой грузоподъемности с управлением от концевых. выключателей (работа на упор).
Гидравлические приводы могут обеспечить широкий диапазон регулирования скорости и иметь высокие динамические показатели. Однако использование их связано с большими эксплуатационными трудностями. Обслуживание гидравлической системы с неизбежными течами в трубопроводах весьма сложно и требует специального персонала. Хотя сам гидравлический двигатель может иметь габариты меньшие, чем электродвигатель, установка в целом занимает больший объем и требует своего расположения вблизи объекта управления, причем наличие гидронасоса и трубопроводов затрудняет размещение оборудования. Также следует отметить потери в гидроустановке. Коэффициент полезного действия гидропривода существенно ниже, чем электромеханической системы.
В дальнейшем будут рассматриваться лишь электрические двигатели, которые имеют преимущественное распространение и являются основным типом двигателей в следящих системах. К тому же студенты, специализирующиеся в области электропривода, автоматики и управления, согласно учебным планам, не имеют объема знаний по механике и гидравлике, достаточного для глубокого изучения гидравлических двигателей и систем. Одно из основных требований к позиционным и следящим системам - быстрая отработка заданной дистанции или движение за перемещающимся объектом с минимальной погрешностью. Для реализации этого требования система должна обладать соответствующими свойствами, обеспечение которых возможно лишь при выборе надлежащего двигателя. При этом проектировщика должен интересовать не двигатель как таковой, а все электромашинное устройство, состоящее из преобразователя и двигателя. Только при наличии индивидуального преобразователя и соответствующей системы управления можно обеспечить необходимые для следящей системы регулировочные свойства.
Первый вопрос, который возникает, - выбор рода тока: что следует предпочесть - электромашинное устройство постоянного или переменного тока. До настоящего времени преимущественное использование в следящих системах находили электромашинные устройства постоянного тока.
С середины двадцатого столетия началась эра полупроводниковой техники. Соответственно и преобразователи для питания двигателей постоянного тока стали строиться на основе полупроводниковых средств. Область применения системы генератор-двигатель с электромашинным преобразователем-генератором постепенно стала сужаться и в следящих системах сейчас практически не применяется. Первоначально использовались преимущественно тиристорные преобразователи - управляемые выпрямители. Однако им свойствен целый ряд недостатков - неполная управляемость, низкий коэффициент мощности при регулировании напряжения и другие. Поэтому с появлением силовых транзисторов на токи сотни ампер и напряжение до 1 кВ в области маломощных установок (до 5-10 кВт), к каковым обычно относятся следящие системы, состоялся переход на транзисторные преобразователи. При этом наряду с управляемыми выпрямителями в широких масштабах стали использоваться широтно-импульсные преобразователи (ШИП). Первоначально ШИП нашли применение в локальных установках с бортовой сетью, питаемой от генератора с неизменным напряжением. В этих условиях часто необходимое экономичное регулирование скорости двигателя постоянного тока может быть обеспечено только за счет широтно-импульсной модуляции. Вскоре ШИП стали применяться и в прецизионных регулируемых установках вследствие ряда их положительных свойств, к которым в первую очередь следует отнести лучшую форму напряжения, так как пульсации при частоте модуляции несколько килогерц практически неощутимы. Также при использовании ШИП снимается проблема низкого коэффициента мощности, характерная для тиристорных преобразователей типа управляемый выпрямитель. Возможно, в ближайшее время эта проблема будет решена и за счет использования полностью управляемых тиристоров. В настоящее время преимущественное распространение имеют установки с ШИП.
В системе полупроводниковый преобразователь - двигатель, как правило, используется двигатель независимого возбуждения (или с постоянными магнитами) [42]. Двигатель последовательного возбуждения с мягкими нелинейными характеристиками мало пригоден для следящих систем. Преимуществом его является отсутствие специального источника для питания цепи возбуждения и полезное использование некоторых гармонических составляющих тока при питании от управляемого выпрямителя, что связано с одновременным изменением знака как у первой гармонической составляющей тока, так и магнитного потока.
Большим недостатком всех машин постоянного тока традиционного исполнения является наличие коллектора, осложняющего их эксплуатацию. Однако в настоящее время начинают успешно внедряться вентильные двигатели, у которых механический коллектор заменен полупроводниковым коммутатором, управляемым отдатчика положения ротора, жестко связанного с осью двигателя. По принципу действия вентильный двигатель представляет собой обращенный двигатель постоянного тока, у которого обмотка якоря размещена на статоре, а возбуждение обеспечивается со стороны ротора. При этом для создания магнитного поля используется постоянный магнит, выполненный из редкоземельных материалов или из специальных сплавов, как, например ЮНДК. Число секций обмотки якоря с целью сокращения числа коммутирующих полупроводниковых аппаратов принимается малым, обычно от 2 до 4. Датчик положения ротора ДПР может быть как импульсным, дискретным, так и непрерывного действия. К первым относятся датчики типа механического коммутатора, фотоэлектрические, трансформаторные датчики и другие. Характерным примером датчиков с непрерывным сигналом является вращающийся трансформатор. Датчики непрерывного действия обеспечивают лучшую форму тока, приближающуюся к синусоидальной, что минимизирует потери в обмотках и в стали. Форма тока при использовании датчиков с дискретными свойствами практически прямоугольная.
Для исключения токоподводов к вращающимся элементам датчиков обычно применяют вращающиеся трансформаторы (ВТ), выполняемые по типу редуктосинов, у которых все обмотки расположены на статоре. Частота возбуждения ВТ принимается 1-2 кГц, поэтому на входе системы управления используется источник опорного напряжения (ИОН) на соответствующую частоту (рис. 2.1). Для питания двух обмоток токами, сдвинутыми на 90°, ИОН имеет два выхода с опорными напряжениями, соответственно сдвинутыми на тот же угол 90°.

Рис. 2.1. Функциональная схема включения вентильного двигателя с непрерывном управлением
М - модулятор; Ф - фильтр; УМ - усилитель мощности
После фазочувствительного выпрямителя ФЧВ вновь получаем напряжение частоты вращения двигателя, которое после фильтрации и усиления подводится к обмоткам якоря двигателя.
При построении схемы управления трехфазным двигателем используются ВТ с тремя лучами вторичной обмотки (рис. 2.2). Подобные ВТ (редуктосины) разработаны в НИИ малых электрических машин.
Механические характеристики вентильных двигателей аналогичны характеристикам машин постоянного тока независимого возбуждения и близки к линейным. Однако за счет влияния индуктивности якорной цепи возможны несущественные отклонения от линейного закона (рис. 2.3). Основное влияние при этом оказывает индуктивность фильтра Ф, последовательно включенного в цепь.
В динамических режимах вентильный двигатель ведет себя как и обычный двигатель постоянного тока. Добавляется в структуру лишь еще одно апериодическое звено, обусловленное, как указано выше, индуктивными элементами в цепи якоря, преимущественно фильтра. Соответствующая передаточная функция имеет вид
![]()
где Ту - постоянная времени элементов цепи управления; Тя -электромагнитная постоянная двигателя; Тм - электромеханическая постоянная.
В настоящее время в связи с появлением силовых транзисторов на большие токи создаются вентильные двигатели, номинальная мощность которых составляет несколько сотен киловатт. Однако преимущественно вентильные двигатели строят на мощности до 1-2 кВт и поэтому они могут успешно применяться в позиционных и следящих приводах [21, 35].
Рис.
2.2. ВТ (редуктосин) с тремя ветвями
вторичных обмоток

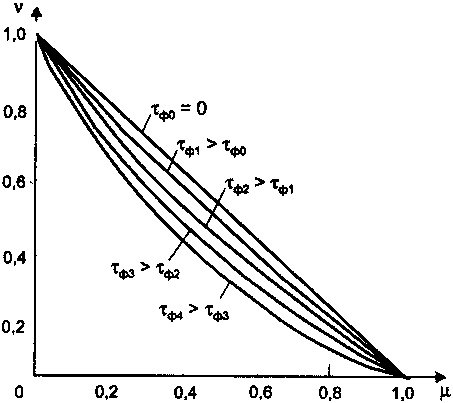
Рис. 2.3. Механические характеристики вентильного двигателя
Для создания быстродействующих следящих систем целесообразно применение малоинерционных двигателей постоянного тока, у которых электромеханическая постоянная времени составляет около 0,01 с, а электромагнитная постоянная единицы миллисекунд [42, 45].
Конструктивно они выполняются в ряде вариантов:
-
Якорь сигарообразный, вытянутой формы, с размещением обмотки на цилиндрической поверхности якоря. Крепление обмотки осуществляется за счет использования клеющих материалов типа эпоксидной смолы. Расположение обмотки в зазоре вне магнитных материалов приводит к существенному уменьшению ее индуктивности. К такого рода двигателям относятся двигатели серий: ПГТ, МИГ и др.
-
Якорь представляет полый цилиндр из немагнитного, изоляционного материала. Обмотка располагается на цилиндрической поверхности якоря. Она может быть изготовлена печатным фотоспособом с использованием фольгированного текстолита, штамповкой из тонкого материала типа фольги и другими методами. Внутри цилиндра для уменьшения магнитного сопротивления располагается неподвижный стальной цилиндр. Как электромеханическая, так и электромагнитная постоянные якоря такого двигателя весьма малы. Примером подобных двигателей могут являться двигатели серии ДПР.
3. Двигатели с дисковым ротором. Обмотка, которая выполняется теми же методами, что и в предыдущем варианте, располагается на обеих поверхностях диска. Коллектор вообще может отсутствовать, и щетки скользят непосредственно по проводникам обмотки. К двигателям с дисковым ротором относятся двигатели, изготавливаемые в РФ, типа ДПУ, ПЯ.
Недостатком всех малоинерционных двигателей является развитая система возбуждения, что обусловлено большими немагнитными зазорами. Внешние габариты двигателя при этом как при электромагнитном, так и при магнитоэлектрическом возбуждении получаются значительными.
Малоинерционные двигатели следует применять только для механизмов, обладающих малыми собственными моментами инерции, однако и в этом случае высокие динамические свойства малоинерционных двигателей могут использоваться далеко не всегда. Большие ускорения, обеспечиваемые ими, могут приводить к большим динамическим усилиям и поломке механизмов. Результатом весьма малой механической инерции может быть неравномерность движения, особенно при малых уровнях скорости. Естественно стремление к широкому использованию электромашинных систем переменного тока в связи с тем, что как генерирование, так и распределение электрической энергии осуществляется на переменном токе. Однако ожидаемый при этом эффект только кажущийся, так как для обеспечения требуемых регулировочных свойств системы обязательно наличие в ней преобразователя частоты. Это может быть преобразователь со звеном постоянного тока или непосредственной связью (НПЧ) [40]. При этом электромашинное устройство переменного тока становится даже более сложным, чем устройство постоянного тока. Как известно, в первом из них регулированию подлежат одновременно две величины, как частота, так и напряжение.
Преимуществом короткозамкнутого асинхронного двигателя является простота конструкции. Однако момент инерции асинхронного двигателя и соответственно Тм несколько больше, чем у двигателя постоянного тока, особенно высокомоментного.
Основным преимуществом короткозамкнутых двигателей является технологичность их конструкции. Изготовление их может с успехом осуществляться на автоматизированных поточных линиях. Напротив, наличие у машин постоянного тока коллектора усложняет изготовление и не позволяет обеспечить автоматизированный цикл производства. Для двигателей постоянного тока обычно используется ручная сборка. Более простая конструкция короткозамкнутого двигателя и технологичность его изготовления обеспечивает меньшую его стоимость и продажную цену. Однако, как правило, для асинхронного двигателя, используемого в системах векторного управления, требуется применение датчиков тока, скорости или положения, стоимость которых может быть соизмерима со стоимостью самого асинхронного двигателя малой мощности.
Далеко не безразлично, из какой серии двигателей выбрать необходимый по мощности и скорости исполнительный двигатель. Согласно ГОСТ 188-74 и нормам МЭК рассматриваются восемь типовых режимов, применительно к которым должны выпускаться электродвигатели [35]. В настоящее время в России изготавливаются лишь двигатели, предназначенные для работы в двух режимах: длительном S1 и повторно-кратковременном S2. Для позиционных и следящих систем наиболее пригодны были бы двигатели, рассчитанные на повторно-кратковременный режим S5 с торможение в конце каждого цикла. Однако специальные двигатели для режима S5 в РФ не изготавливаются и приходится применять двигатели, предназначенные для систем автоматики в широком понимании. К ним относятся сравнительно маломощные двигатели с достаточно широким диапазоном регулирования скорости и уменьшенным моментом инерции ротора.
При рассмотрении вопроса о том, из какой серии выбрать двигатель, кроме учета конструктивных, экономических и других соображений следует ориентироваться на максимально обеспечиваемое соотношение Мд. ном /Jд, где Мд. ном - номинальный момент двигателя; Jд - момент инерции двигателя. Как следует из формулы

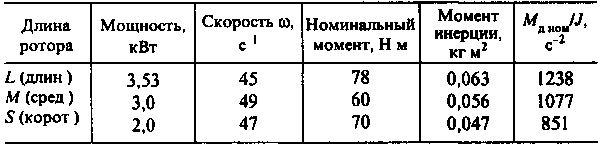
Из этих же соображений всегда следует ориентироваться на двигатели, в условном обозначении которых присутствует буква L. Как известно, двигатели изготавливаются на несколько значений мощности на одном штампе стали ротора и статора. При этом двигатели с удлиненным ротором (L) всегда имеют лучшие динамические свойства по сравнению с двигателями с коротким ротором (S) той же мощности. Для примера приведем данные для группы двигателей новой серии машин постоянного тока 4ПФ-112 с высотой центров вала 112 мм.
В сериях СЛ и МИ, из этих же соображений для каждого габарита предпочтительней двигатели, имеющие большие номера, а именно для СЛ: 161, 261, 361 и т. д.; для МИ: 12, 22, 32 и т. д. (рис. 2.4).
Как видно, двигатели с удлиненным ротором наряду с увеличением мощности имеют и существенно большее значение величины Мд. ном /Jд, характеризующей обеспечиваемое ими ускорение.
В некоторых случаях, если позволяют габариты, для уменьшения момента инерции могут быть использованы два двигателя, роторы которых размещены на общей оси. При мощности более 20 кВт может быть эффективен гидропривод.
Преобразователи, используемые в системах переменного тока, в силу их большей сложности всегда имеют большие габариты, чем преобразователи в системах постоянного тока. В первую очередь это относится к преобразователям типа НПЧ, в которых используется большее число аппаратов - тиристоров; в типовой трехфазной схеме их 18. В связи с этим в подобных установках рационально применение не трехфазных, а двухфазных двигателей. В этом случае число тиристоров сокращается с 18 до 12. Двухфазные двигатели для питания от преобразователей частоты в ближайшее время будут изготавливаться в РФ серийно.
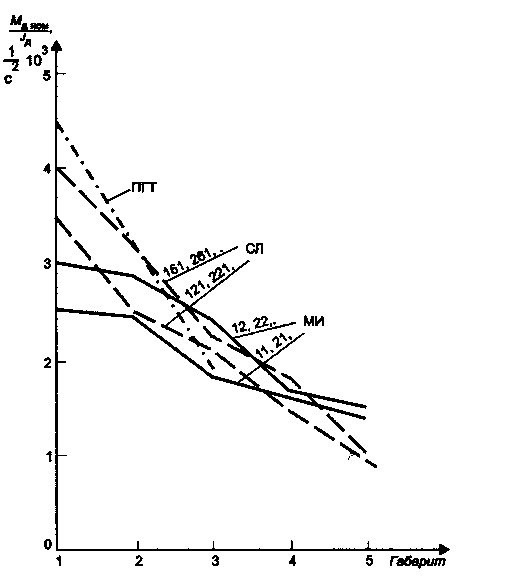
Рис. 2.4. Зависимости отношения Мд. ном /Jд (т. е. максимального ускорения) от габарита двигателя (серии МИ, СЛ, ПГТ)
Весьма просто электромашинные устройства переменного тока выполняются при использовании двухфазных двигателей, питаемых несимметричным напряжением. В обмотке одной из фаз двигателя (в обмотке возбуждения) ток фиксированный, а в другой фазе - управляющей может изменяться по амплитуде или фазе. Однако подобные электромашинные устройства обладают существенным недостатком - большими потерями энергии в двигателях, обусловленными двумя причинами: тормозным действием момента, создаваемого обратносинхронным магнитным полем, и использованием двигателей повышенного скольжения (Sk ≈ 1), что необходимо для обеспечения требуемого вида механических характеристик (рис. 2.5). При использовании обычного двигателя с Sk = 0,15÷0,2 регулирование скорости невозможно.
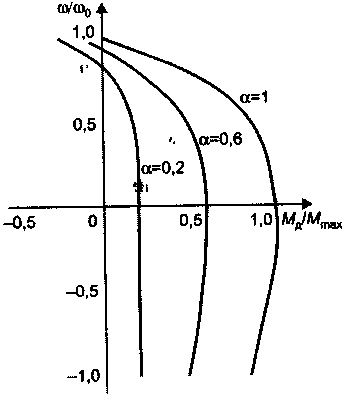
Рис. 2.5. Механические характеристики двухфазного асинхронного
двигателя при амплитудном управлении
α - относительное значение напряжения на управляющей обмотке
Для питания двигателя и соответственно для изменения тока в управляющей обмотке могут применяться либо полупроводниковые преобразователи, либо магнитные усилители (МУ). В первом случае на выходе обычно используется дифференциальный усилитель, который дает возможность изменять ток по фазе на 180° и соответственно реверсировать двигатель. Для создания необходимого сдвига фаз 90° между токами в обмотках, как правило, последовательно с обмоткой возбуждения включается конденсатор. Не заслуженно малое использование имеют магнитные усилители. Между тем сочетание двухфазного двигателя и МУ дает всегда весьма надежный и достаточно быстродействующий привод.
Использование МУ целесообразно для систем, работающих в активных средах, как-то: в морских подводных условиях и особенно при повышенной радиации. Полупроводниковые устройства в таких средах функционировать не могут.
Регулируемые двухфазные двигатели как за рубежом, так и в РФ строятся на мощности до 100-150 Вт. В равной мере используются двигатели как с беличьей клеткой, так и с полым ротором. Последние, казалось бы, имеют преимущество по величине момента инерции, однако в силу большого сопротивления вторичного контура электромеханическая постоянная у них имеет примерно то же значение, как и у двигателей с беличьей клеткой.
При питании двигателей симметричным трехфазным напряжением от преобразователя частоты как со звеном постоянного тока, так и типа НПЧ, могут применяться как асинхронные, так и синхронные двигатели. Асинхронные двигатели более устойчивы в работе. Приводы с синхронными двигателями склонны к качаниям. Часто приходится вводить дополнительное демпфирование. Демпфирующего действия, создаваемого пусковой обмоткой типа беличья клетка, может быть недостаточно. Синхронные двигатели, как правило, используются с возбуждением от постоянных магнитов или с неподвижной обмоткой возбуждения (с когтеобразным ротором).
Однозначно высказаться в пользу электромашинного устройства постоянного или переменного тока нельзя. По-видимому, в ближайшее время параллельно будут развиваться оба варианта устройств. Сейчас среди регулируемых приводов, выпускаемых электротехнической промышленностью, приводы постоянного тока составляют несколько больше половины. В дальнейшем по мере совершенствования полупроводниковой техники можно ожидать увеличение доли приводов переменного тока. За рубежом системы переменного тока у многих фирм уже преодолели 50%-ный рубеж.
В некоторых случаях может быть целесообразно применение шаговых двигателей. Основным преимуществом их следует считать удобное совмещение с устройствами цифровой техники. Управление двигателями может непосредственно осуществляться сигналами в унитарном коде. Однако по своим динамическим свойствам шаговые двигатели существенно уступают двигателям непрерывного действия. При импульсном характере тока его среднеквадратическое значение, определяющее нагрев обмоток, значительно превышает среднее значение, от которого зависит электромагнитный момент.
Приемистость шагового двигателя - предельная частота, при которой возможен его разгон без потери шага, ощутимо снижается преувеличении момента инерции за счет присоединения инерционных масс приводимого в движение механизма и при наличии большого статического момента, создаваемого этим механизмом.
Как правило, шаговые двигатели используются в системах разомкнутых, с использованием мер, исключающих возможность пропуска шага. Замыкание системы обратной связью по скорости или положению часто приводит к качаниям около установившегося положения при отработке последнего шага.
В настоящее время в системах, к которым не предъявляются высокие требования по динамике и погрешностям, достаточно успешно стал использоваться двигатель, получивший наименование вентильнореактивный (ВРД). Конструктивно он подобен шаговому двигателю с пассивным ротором, но имеет существенно меньшее число полюсов ротора. Он представляет собой реактивный двигатель с явно выраженными полюсами как на роторе, так и на статоре. Число полюсов рст и рр различно, а именно 6/4, 8/6 и т. д.
Управление двигателем осуществляется от импульсного устройства, построенного на силовых полупроводниковых элементах. Для создания необходимых условий управления используется датчик положения ротора. Преимущественно работа двигателя протекает не в шаговом режиме, а в непрерывном, но с некоторыми колебаниями скорости. Глубокое регулирование скорости, при котором возможен переход системы в шаговый режим, не применяется.
В настоящее время двигатели ВРД в основном используются в бытовых приборах и устройствах, в электроинструменте и других подобных механизмах, однако постепенно они завоевывают новые сферы применения, вплоть до позиционных систем.
При выборе типа двигателя существенное значение имеет надежность работы как самого двигателя, так и электромашинного устройства в целом. В современных условиях надежность, как правило определяется не типом двигателя и преобразователя, а технологическими особенностями производства выпускающей их фирмы. Как ни странно, надежность асинхронного двигателя обычно не выше, чем машины постоянного тока, что обусловлено малым магнитным зазором и низким качеством подшипников, изготавливаемых в РФ. Надежность преобразователей в основном определяется качественными свойствами элементной базы, на которой они построены.