

3. Расчет контура регулирования тока якоря.
Расчет и настройку многоконтурной системы начинают с внутреннего контура - контура регулирования тока. Оптимизированный токовой контур представляет собой составную часть объекта управления в контуре регулирования скорости вращения электродвигателя: от его быстродействия в значительной мере зависят динамические качества всей системы управления электроприводом.
В
соответствии со структурной схемой
(см. рис.1) объект управления в контуре
тока якоря
![]() состоит из управляемого силового
преобразователя и якорной цепи
электродвигателя:
состоит из управляемого силового
преобразователя и якорной цепи
электродвигателя:
![]() ,
,
где
![]() -
большая постоянная времени, а
-
большая постоянная времени, а![]() -
малая. Тогда по передаточной функции
объекта управления с заданными
компенсируемой (
-
малая. Тогда по передаточной функции
объекта управления с заданными
компенсируемой (![]() )
и не компенсируемой (
)
и не компенсируемой (![]() )
частями для оптимизации контура
регулирования тока по техническому
оптимуму необходимо выбирать ПИ –
регулятор с передаточной функцией вида:
)
частями для оптимизации контура
регулирования тока по техническому
оптимуму необходимо выбирать ПИ –
регулятор с передаточной функцией вида:
 ,
(1.1)
,
(1.1)
где
![]() - коэффициент передачи обратной связи
по току якоря.
- коэффициент передачи обратной связи
по току якоря.
Регулятор
тока реализуется на базе операционного
усилителя, в цепи обратной связи которого
ставятся сопротивление
![]() и
и![]() .
Сигнал задания через сопротивление
.
Сигнал задания через сопротивление![]() поступает на первый вход, а сигнал с
датчика тока через
поступает на первый вход, а сигнал с
датчика тока через![]() на второй вход. Схема регулятора тока
показана на рис.3.1.
на второй вход. Схема регулятора тока
показана на рис.3.1.
И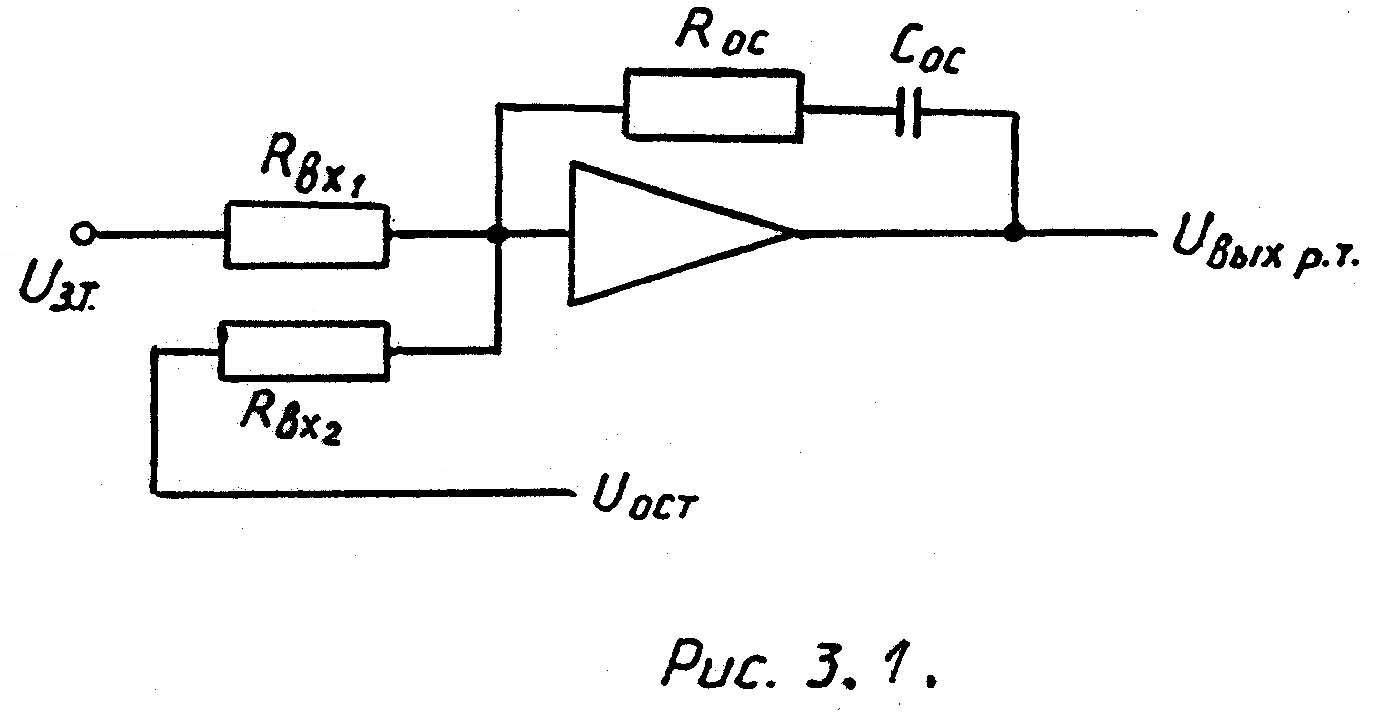 з
рис.3.1 видно, что операционный усилитель
имеет 2 входа, на которые подаются
соответствующие сигналы. Для приведения
реальной схемы (см. рис.3.1) к расчетной
(с одним входом) необходимо выполнить
эквивалентное приведение сигналов
задания и обратной связи, учитывая, что
сумматор осуществляет сложение токов.
При подаче
з
рис.3.1 видно, что операционный усилитель
имеет 2 входа, на которые подаются
соответствующие сигналы. Для приведения
реальной схемы (см. рис.3.1) к расчетной
(с одним входом) необходимо выполнить
эквивалентное приведение сигналов
задания и обратной связи, учитывая, что
сумматор осуществляет сложение токов.
При подаче![]() на вход усилителя через
на вход усилителя через![]() сигнал на выходе
сигнал на выходе![]() равен:
равен:
![]() .
.
Из
этого равенства следует, что
![]() будет иметь ту же величину, если
будет иметь ту же величину, если![]() подать на вход усилителя через
подать на вход усилителя через![]() ,
но при этом необходимо изменить
,
но при этом необходимо изменить![]() в
в![]() раз. Поэтому расчетной величиной
напряжения обратной связи по току
раз. Поэтому расчетной величиной
напряжения обратной связи по току![]() следует считать:
следует считать:
![]() .
.
Из
схемы (см. рис.1) следует, что
![]() .
Реально измеряемая величина
.
Реально измеряемая величина![]() .
.
Поэтому
![]() .
.
Из
последнего соотношения определяем
выражение для расчёта коэффициента
обратной связи по току
![]() в зависимости от параметров реальных
элементов схемы:
в зависимости от параметров реальных
элементов схемы:
![]() .
(1.2)
.
(1.2)
Передаточная функция ПИ – регулятора на базе усилителя с RC–цепью обратной связи относительно сигнала на первом входе примет вид:
![]() .
(1.3)
.
(1.3)
Приравнивая
теперь соответствующие коэффициенты
в (1.1) и (1.3), и используя при этом
выражение (1.2), получим следующую систему
двух уравнений с тремя неизвестными
![]() ,
,![]() и
и![]() :
:
![]() .
(1.4)
.
(1.4)
Изменение
настроек регуляторов удобнее производить
за счет активных сопоставлений, поэтому
обычно в серийных регуляторах емкость
![]() задается постоянной (в пределах
задается постоянной (в пределах![]() мкФ).
В рассматриваемом примере в соответствии
с заданием
мкФ).
В рассматриваемом примере в соответствии
с заданием![]() мкФ.
Откуда
мкФ.
Откуда
![]() кОм.
кОм.
Сопротивление
![]() можно найти при условии ограничения до
требуемого уровня тока якоря двигателя
в соответствии с максимальным уровнем
задающего сигнала
можно найти при условии ограничения до
требуемого уровня тока якоря двигателя
в соответствии с максимальным уровнем
задающего сигнала![]() (см. рис.1). Считая достаточно малым,
сигнал ошибки на выходе регулятора тока
и, принимая на этом основании
(см. рис.1). Считая достаточно малым,
сигнал ошибки на выходе регулятора тока
и, принимая на этом основании![]() ,
получаем, с учетом ранее полученного
выражения
,
получаем, с учетом ранее полученного
выражения
![]() ,
,
следующее
выражение, связывающее максимальное
значение
![]() и
и![]() запишется так:
запишется так:
![]() .
(1.5)
.
(1.5)
При
известной величине
![]() ,
равной максимальному выходному напряжению
регулятора скорости (
,
равной максимальному выходному напряжению
регулятора скорости (![]() В), из последнего соотношения можно
определить
В), из последнего соотношения можно
определить![]() ,
а затем и остальные параметры регулятора
тока
,
а затем и остальные параметры регулятора
тока![]() и
и![]() :
:
![]() кОм;
кОм;
![]() кОм;
кОм;
![]() В/А.
В/А.
Окончательно, передаточная функция регулятора тока принимает следующий вид:
 .
.
Таким
образом, определены все сопротивления,
реализующие искомые настройки регулятора
тока
![]() ,
,![]() и
и![]() .
Расчеты значения всех сопротивлений
не должны выходить за пределы, оговоренные
техническими условиями применения
выбранных типов операционных усилителей.
В случае невыполнения этого условия
необходимо задаться другой величиной
емкости
.
Расчеты значения всех сопротивлений
не должны выходить за пределы, оговоренные
техническими условиями применения
выбранных типов операционных усилителей.
В случае невыполнения этого условия
необходимо задаться другой величиной
емкости![]() и повторить расчет.
и повторить расчет.