

4. Расчет контура регулирования скорости.
Объектом
управления для этого контура (см. рис.1)
является электромеханическое звено
![]() собственного объекта и замкнутый контур
регулирования тока якоря с оптимизированной
передаточной функцией
собственного объекта и замкнутый контур
регулирования тока якоря с оптимизированной
передаточной функцией![]() ,
равной
,
равной
![]() .
.
Пренебрегая
в знаменателе членами с “![]() ”
в степени выше первой (малыми второго
порядка), получим:
”
в степени выше первой (малыми второго
порядка), получим:
![]() .
.
В
итоге передаточная функция объекта
управления в контуре регулирования
скорости
![]() принимает вид
принимает вид
![]() ,
,
где
![]() - большая постоянная времени, а
- большая постоянная времени, а![]() - малая. Далее, по аналогии с синтезом
регулятора тока, по передаточной функции
объекта управления (
- малая. Далее, по аналогии с синтезом
регулятора тока, по передаточной функции
объекта управления (![]() )
с заданными компенсируемой (
)
с заданными компенсируемой (![]() )
и не компенсируемой (
)
и не компенсируемой (![]() )
частями для оптимизации контура
регулирования скорости по техническому
(модульному) оптимуму необходимо выбрать
П – регулятор с коэффициентом передач:
)
частями для оптимизации контура
регулирования скорости по техническому
(модульному) оптимуму необходимо выбрать
П – регулятор с коэффициентом передач:
![]() ,
(1.6)
,
(1.6)
где
![]() - коэффициент передачи обратной связи
по скорости. Полученный пропорциональный
регулятор реализуется на базе оперативного
усилителя с активным сопротивлением
обратной связи. Упрощенная схема
регулятора скорости приведена на
рис.3.2.
- коэффициент передачи обратной связи
по скорости. Полученный пропорциональный
регулятор реализуется на базе оперативного
усилителя с активным сопротивлением
обратной связи. Упрощенная схема
регулятора скорости приведена на
рис.3.2.
А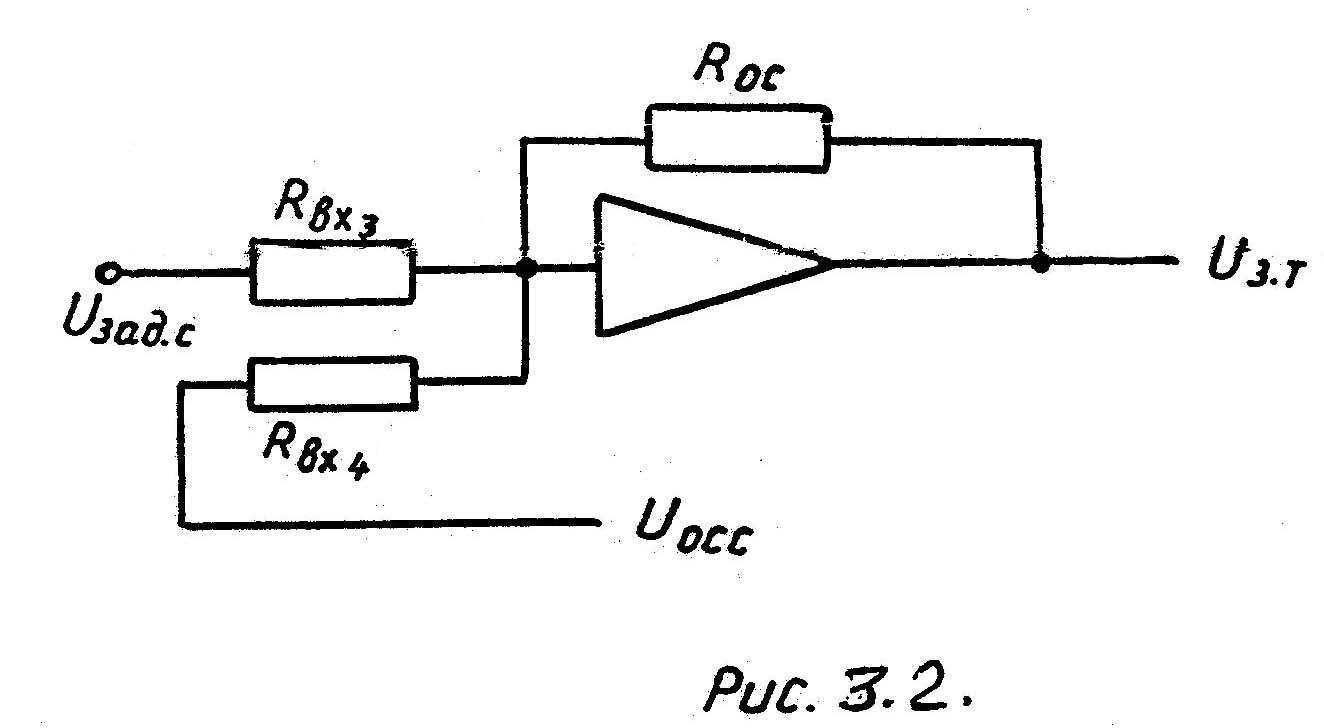 налогично
ранее рассмотренному при расчете
параметров регулятора тока найдем
расчетное выражение для
налогично
ранее рассмотренному при расчете
параметров регулятора тока найдем
расчетное выражение для![]() после приведения сигнала обратной связи
по скорости к задающему входу регулятора
с входным сопротивлением
после приведения сигнала обратной связи
по скорости к задающему входу регулятора
с входным сопротивлением![]() :
:
![]() (1.7)
(1.7)
где
![]() В. с/рад
– заданный коэффициент передачи
используемого в системе датчика скорости.
В. с/рад
– заданный коэффициент передачи
используемого в системе датчика скорости.
Передаточная
функция П- регулятора на базе усилителя
с активным сопротивлением обратной
связи относительно сигнала на
![]() имеет вид
имеет вид
![]() .
(1.8)
.
(1.8)
Приравнивая
выражения для регулятора скорости по
(1.6) и (1.8), получим с учетом выражений
(1.2) и (1.7) для
![]() и
и![]() следующие соотношение, связывающее
искомые настройки П- регулятора скорости
следующие соотношение, связывающее
искомые настройки П- регулятора скорости![]() и
и![]() :
:
![]() .
(1.9)
.
(1.9)
Здесь
входные регуляторы сопротивления тока
![]() и
и![]() уже определены ранее при выборе параметров
его настроек.
уже определены ранее при выборе параметров
его настроек.
Подобно
выражению (1.5), равенство (1.9) дополняется
уравнением связи максимальной величины
задающего
![]() на входе регулятора скорости с приведенным
значением
на входе регулятора скорости с приведенным
значением![]() максимального сигнала обратной связи
по скорости
максимального сигнала обратной связи
по скорости
![]() ,
(1.10)
,
(1.10)
где
максимальное значение скорости
![]() определено
в задании (
определено
в задании (![]() рад/с), а
рад/с), а![]() принимается равным максимальному
напряжению при входе стандартного
задающего устройства блочной системы
регулирования (
принимается равным максимальному
напряжению при входе стандартного
задающего устройства блочной системы
регулирования (![]() В).
В).
Два
уравнения (1.9) и (1.10) оставляют свободу
выбора одной из трех неизвестных
![]() ,
,![]() и
и![]() .
Обычно задаются входным сопротивлением
.
Обычно задаются входным сопротивлением![]() ,
после чего
,
после чего![]() и
и![]() последовательно определяется из
соотношений (1.9) и (1.10). Задавая,
последовательно определяется из
соотношений (1.9) и (1.10). Задавая,![]() кОм, вычислим последовательно искомые
параметры
кОм, вычислим последовательно искомые
параметры![]() ,
,![]() ,
,![]() :
:
![]() кОм;
кОм;
![]()
![]() кОм;
кОм;
![]() .
.
Следующий
этап – статистический расчет
синтезированной системы как по отношению
к задающему, так и по возмущающим
воздействиям, а также анализ переходного
процесса при ударном приложении нагрузки.
Необходимо ответить, что синтезированная
выше САУ обеспечивает астатизм системы
по отношению к задающему воздействию.
Однако при пропорциональном регуляторе
скорости этот астатизм создаётся за
счет интегрирующего электромеханического
звена
![]() в структуре объекта и не сохраняется
по отношению к основному возмущающему
воздействию – нагрузке на валу двигателя.
Поэтому, если к системе предъявляются
определенные требования к точности
стабилизации скорости при вариациях
нагрузки в установившихся режимах её
работы, необходимо выяснить, удовлетворяются
ли они выбранным П – регулятором
скоростного контура. Статистические
свойства контура регулирования скорости
существенно улучшается при его настройке
на симметричный оптимум, для которого
регулятор всегда содержит интегрирующее
звено. В этом случае в системе регулирования
скорости обеспечивается астатизм как
по отношению к задающему, так и возмущающим
воздействиям, что приводит, в частности,
к полной компенсации помехи нагрузки.
Если при этом соответствующие показатели
переходного процесса могут считаться
удовлетворительными, то настройка
скоростного контура на симметричный
оптимум предпочтительна.
в структуре объекта и не сохраняется
по отношению к основному возмущающему
воздействию – нагрузке на валу двигателя.
Поэтому, если к системе предъявляются
определенные требования к точности
стабилизации скорости при вариациях
нагрузки в установившихся режимах её
работы, необходимо выяснить, удовлетворяются
ли они выбранным П – регулятором
скоростного контура. Статистические
свойства контура регулирования скорости
существенно улучшается при его настройке
на симметричный оптимум, для которого
регулятор всегда содержит интегрирующее
звено. В этом случае в системе регулирования
скорости обеспечивается астатизм как
по отношению к задающему, так и возмущающим
воздействиям, что приводит, в частности,
к полной компенсации помехи нагрузки.
Если при этом соответствующие показатели
переходного процесса могут считаться
удовлетворительными, то настройка
скоростного контура на симметричный
оптимум предпочтительна.