

Библиографический список
Современная прикладная теория управления. Оптимизационный подход в теории управлении / Под ред. А.А. Колесникова.- Таганро: 2000. 400 с.
1.Сабинин Ю.А. Позиционные и следящие электромеханические системы. Учебное пособие для вузов. СПб.: Энергоатомиздат СПб отделение. 2001.-208с.
Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. М.: Машиностроение, 1989. 752 с.
Растригин Л.А., Маджаров Н.Е. Введение в идентификацию объектов управления. М.: Энергия, 1977. 216 с.
Родионов В.Д., Терехов В.А., Яковлев В.Б. Технические средства АСУТП. М.: Высш. школа, 1988. 263 с.
Мухин В.С., Саков И.А. Приборы контроля и средства автоматики тепловых процессов. М.: Высш. школа, 1988. 256 с.
Беляев Г.Б., Кузицин В.Ф., Смирнов Н.И. Технические средства автоматизации в теплоэнергетике. М.: Энергия, 1982.
Основы проектирования следящих систем. /Под ред. Лакоты Н.А. М.: Машиностроение, 1978. 392 с.
Автоматизация типовых технологических процессов и установок. /Корытин А.М., Петров Н.А. и др. М.: Энергоатомиздат, 1988. 319 с.
Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. Л.: Энергоатомиздат, 1982. 382 с.
Чернов Е.А., Кузьмин В.П. Комплексные электроприводы станков с ЧПУ: Справ. пособ. Горький: Волго-вятское кн. изд-во, 1989. 319 с.
Башарин А.В. и др. Примеры расчета автоматизированного электропривода. Л.: Энергия, 1972. 440 с.
Клюев А.С. и др. Проектирование систем автоматизации технологических процессов. М.: Энергоатомиздат, 1990. 464 с.
Петров И.К., Петелин Д.П. и др. Курсовое и дипломное проектирование по автоматизации производственных процессов: Учеб. пособ. М.: Высш. школа, 1968. 252 с.
Рапопорт Э.Я. Системы подчиненного регулирования электроприводов постоянного тока: Конспект лекций. Куйбышев: КптИ, 1985. 56 с.
Методические указания к расчету и проектированию СПР. /Куйб. политех. ин-т; Сост. Рапопорт Э.Я. Куйбышев, 1985. 27 с.
Рогач В.Я. Теория автоматического управления теплоэнергетическими процессами. М.: Энергоатомиздат, 1985. 292 с.
Клюев А.С., Товарнов А.Г., Лебедев А.Т., Семенов И.П. Наладка автоматических систем и устройств управление технологическими процессами. М.: Энергия, 1977. 399 с.
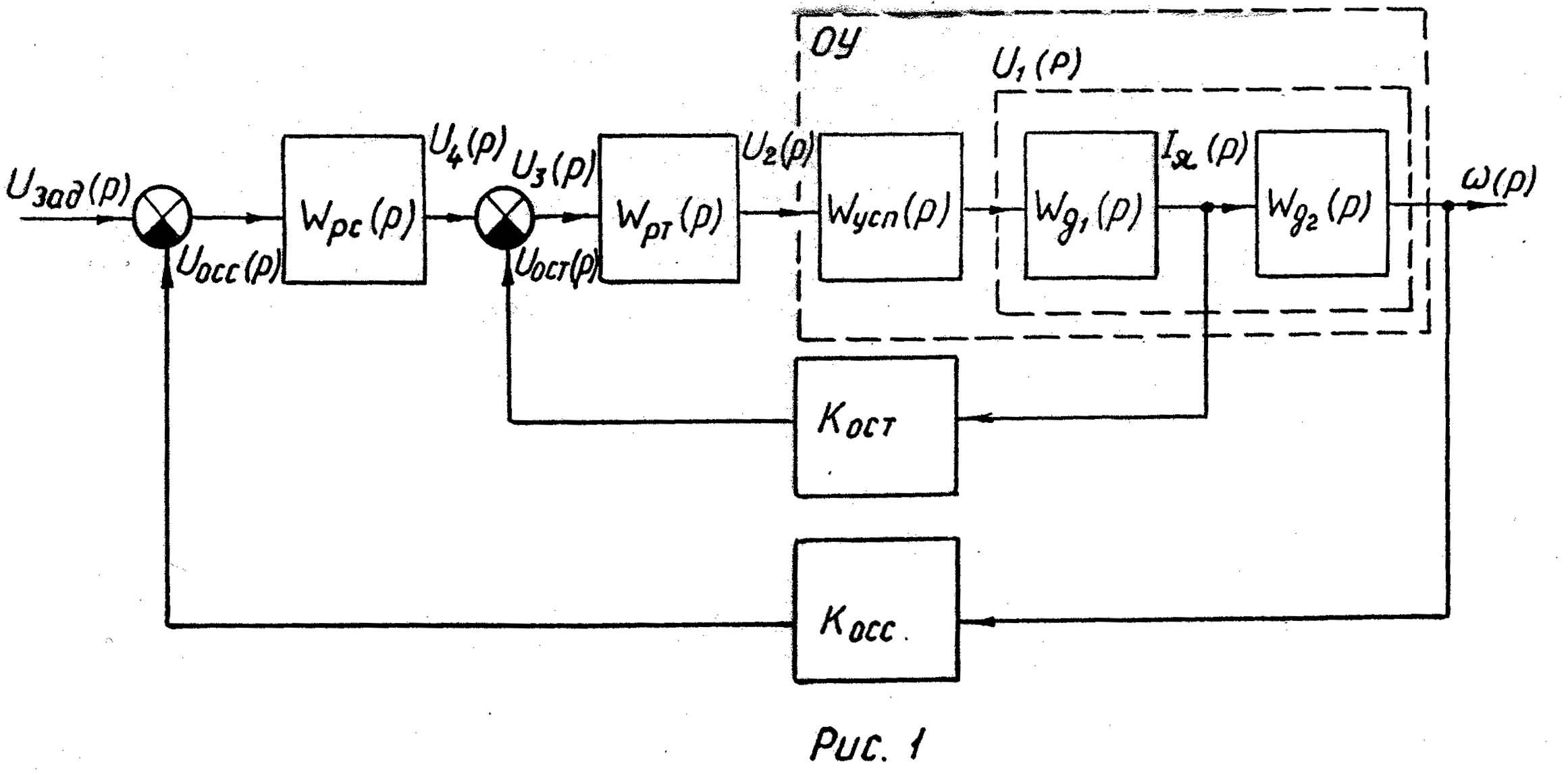
Пример 1.
В качестве примера произведем расчет параметров системы подчиненного регулирования (СПР) скорости вращения электропривода пост оянного тока с управлением по цепи якоря двигателя.
Соответствующие
структурная и упрощенная принципиальная
схемы системы приведены на рис.1 и 2, где
![]() -
передаточные функции регуляторов
скорости и тока соответственно:
-
передаточные функции регуляторов
скорости и тока соответственно:![]() ,
,![]() -
передаточные функции двигателя,
связывающие соответственно процесс
преобразования напряжения на двигателе
в ток якоря
-
передаточные функции двигателя,
связывающие соответственно процесс
преобразования напряжения на двигателе
в ток якоря![]() и ток якоря в угловую скорость
электродвигателя
и ток якоря в угловую скорость
электродвигателя![]() ;
;![]() -
передаточная функция управляемого
силового тиристорного преобразователя;
-
передаточная функция управляемого
силового тиристорного преобразователя;![]() и
и![]() – коэффициенты передачи датчиков
обратной связи по току и скорости.
– коэффициенты передачи датчиков
обратной связи по току и скорости.

1. Исходные данные для расчета двигателя.
Номинальная
мощность:
![]() кВт.
кВт.
Номинальное
напряжение:
![]() В.
В.
Номинальный
ток якоря:
![]() А.
А.
Номинальная
скорость вращения:
![]() об/мин.
об/мин.
Номинальный
момент:
![]() Н.
м.
Н.
м.
Максимальный
ток якоря:
![]() А.
А.
Сопротивление
якоря:
![]() Ом.
Ом.
Сопротивление
обмоток дополнительных полюсов:
![]() Ом.
Ом.
Максимальное
значение скорости:
![]() рад/с.
рад/с.
Момент
инерции двигателя:
![]() кг.
м.
кг.
м.
Индуктивное
сопротивление двигателя:
![]() Гн.
Гн.
Момент
инерции исполнительного механизма,
приведенный к валу двигателя, принять
равным
![]() кг.
м.
кг.
м.
Вентильный преобразователь.
Номинальное
выпрямленное напряжение:
![]() В.
В.
Номинальный
выпрямленный ток:
![]() А.
А.
Активное
сопротивление цепи преобразователя:
![]() Ом.
Ом.
Эквивалентная индуктивность дросселей, трансформатора в цепи преобразователя:
![]() Гн.
Гн.
Максимальный
уровень задающего сигнала УСП принять
равным:
![]() В.
В.
Коэффициент
передачи датчика тока принять равным:
![]() В/А.
В/А.
Коэффициент
передачи датчика скорости принять
равным:
![]() В. с/рад.
В. с/рад.
При
расчете регулятора тока считать заданным
значение емкости в цепи обратной связи:
![]() мкФ.
мкФ.