

7. Получение экспериментальным путем переходных характеристик
объекта регулирования.
Определение переходных характеристик объекта при различных возмущающих воздействиях, занимает особое место при изучении объекта и математического описания всех звеньев, входящих в систему.
Для определения кривых разгона в условиях работы котла необходимо установить стационарный режим (при неизменных расходах воды, пара, воздуха, топлива), выдержать этот режим в течение 10-15 минут, подготовить устройства регистрации уровня в барабане.
Для достоверного определения параметров кривой разгона необходимо снять не менее 6-8 кривых разгона при возмущении одного знака. Отбираются средние значения характеристик, т.е. отбрасываются кривые разгона с самыми неблагоприятными характеристиками.
8. Определение передаточной функции объекта регулирования по экспериментальным данным.
8.1. Аппроксимация кривой разгона по воде при 10% возмущения со стороны ро.
Э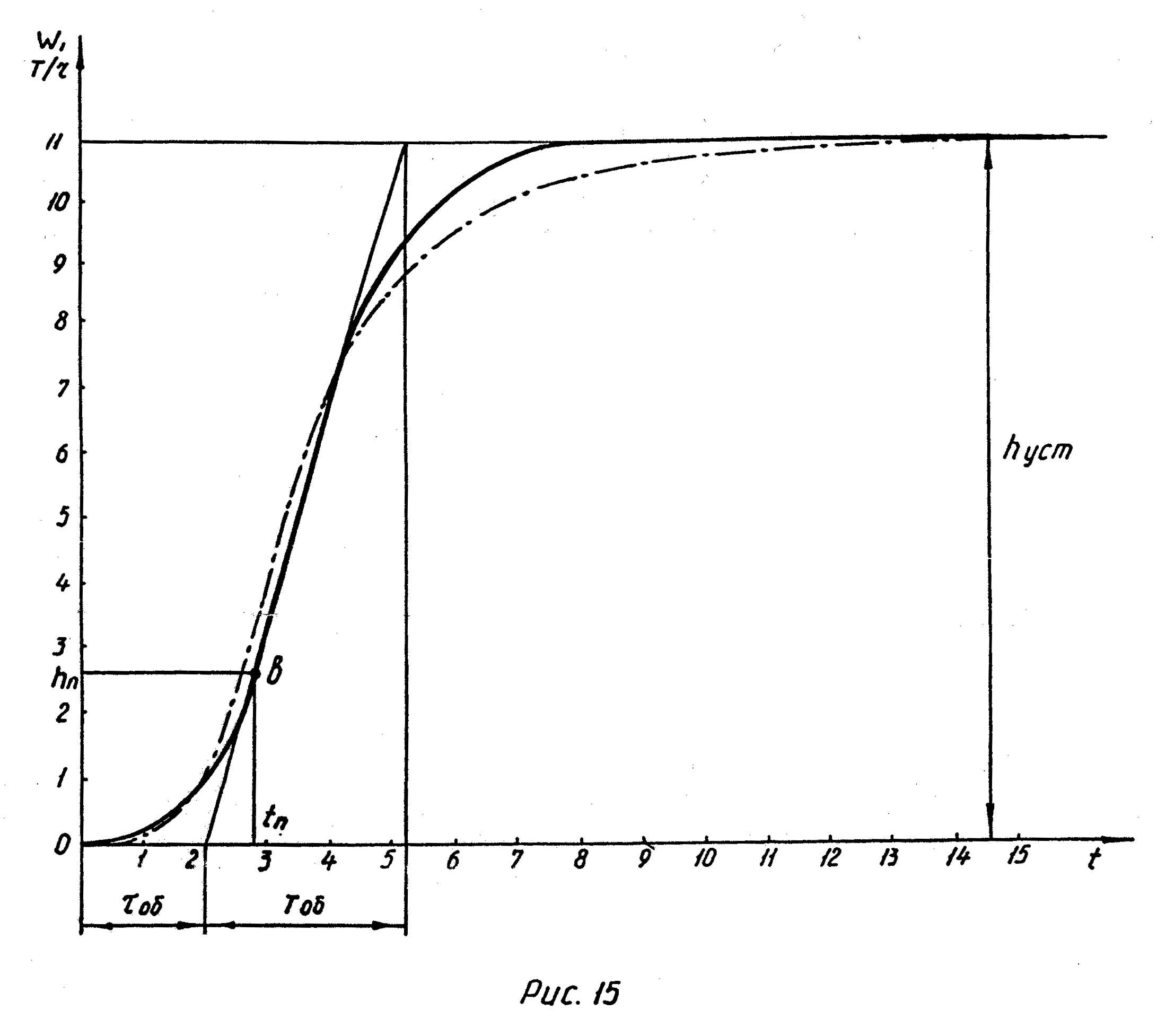 кспериментальная
переходная характеристика, характеризующая
изменение расхода воды при возмущении
регулирующим органом, показана на
рис.15.
кспериментальная
переходная характеристика, характеризующая
изменение расхода воды при возмущении
регулирующим органом, показана на
рис.15.
Коэффициент
усиления объекта
![]() т/г.
т/г.
Структуру
передаточной функции объекта и её
динамические характеристики определяем
по методу В.Я. Ротача. Для этого определим
координаты точки перегиба
![]() с.,
с.,![]() т/час и относительно ординату точки
перегиба по формуле:
т/час и относительно ординату точки
перегиба по формуле:
![]() .
.
По
известной причине
![]() ,
с помощью номограммы 323 (15) определяем
значения
,
с помощью номограммы 323 (15) определяем
значения![]() ;
;![]() ;
;![]() .
.
При
этом передаточная функция будет
аппроксимироваться апериодическим
звеном 2-го порядка (т.к.
![]() не превышает
не превышает![]() ):
):
![]() ;
;
![]() ;
;![]() .
.
Т.к.
![]() с., то,
с., то,![]() ,
,![]() ,
,![]() .
.
Расчетная
величина
![]() практически совпадает с
практически совпадает с![]() ,
взятым из графика, и вводить запаздывание
не следует.
,
взятым из графика, и вводить запаздывание
не следует.
Аппроксимирующая передаточная функция может быть следующей:
![]() .
.
8.2. Аппроксимация кривой разгона по уровню при 10% возмущении расходом воды
Э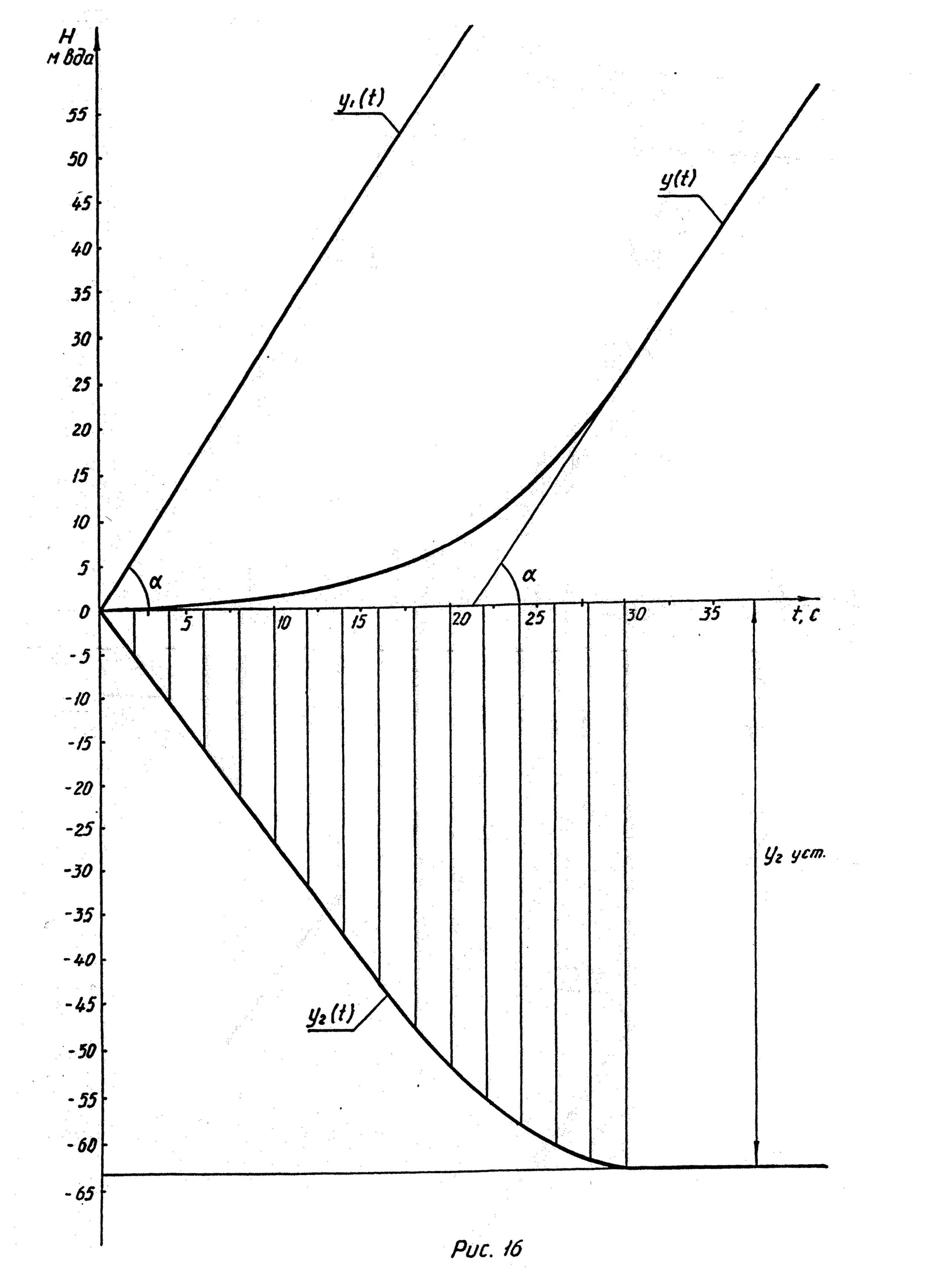 кспериментальная
кривая разгона объекта по уровню при
возмущении расходом питательной воды
показана на рис.16.
кспериментальная
кривая разгона объекта по уровню при
возмущении расходом питательной воды
показана на рис.16.
Т. к. объект астатический, то его динамические свойства эквивалентны параллельному соединению интегрирующего звена и апериодического звена 1-го порядка (см. п. 3).
Проводим асимптоту к кривой разгона и определяем тангенс угла её наклона:
![]() .
.
Строим
прямую
![]() .
.
Вычитая
из прямой
![]() экспериментальную кривую разгона,
получим график функции
экспериментальную кривую разгона,
получим график функции![]() .
.
Кривая
разгона
![]() -
как у статического объекта,
-
как у статического объекта,![]() мм. вд. ст.
мм. вд. ст.
Передаточная
функция объекта с кривой разгона
![]() :
:
![]() .
.
Аппроксимируем
кривую разгона
![]() ,
представляющую собой интегрирующее
звено:
,
представляющую собой интегрирующее
звено:
![]() ;
;
![]() .
.
Коэффициент усиления объекта находим по формуле
![]() .
.
где
![]() - возмущение по расходу воды.
- возмущение по расходу воды.
Передаточная
функция
![]() по уровню при 10% возмущении расходом
воды
по уровню при 10% возмущении расходом
воды
![]() .
.
8.3. Аппроксимация кривой разгона по уровню при 10% возмущении расходом пара
Экспериментальная кривая разгона показана на рис.17. Раскладываем её на интегрирующее звено и апериодическое звена 1-го порядка:
![]()
 -
кривая разгона интегрирующего звена;
-
кривая разгона интегрирующего звена;
![]() -
кривая разгона апериодического звена
1-го порядка;
-
кривая разгона апериодического звена
1-го порядка;
![]() ;
;
![]() .
.
Кривая
разгона
![]() - статический объект;
- статический объект;
![]() мм.вд.ст.
мм.вд.ст.
Коэффициент
усиления объекта
![]() находим по формуле
находим по формуле
![]() ,
,
где
![]() - возмещение расходом пара.
- возмещение расходом пара.
Передаточная
функция объекта с кривой разгона
![]()
![]() .
.
Передаточная
функция объекта с кривой разгона
![]()
![]() .
.
Передаточная функция по уровню при 10% возмущении расходом пара
![]() .
.
9. Определение оптимальных параметров настройки регулятора питания.
9.1. Определение динамических параметров настройки приведенного п-регулятора.
Для приближенной оценки динамических свойств реального объекта аппроксимируем его двумя последовательно соединенными звеньями: апериодическим звеном первого порядка и звеном запаздывания. По кривой разгона (16) определяем:
время
запаздывания:
![]() с.
с.
постоянная
времени:
![]() с.
с.
По номограмме 5.14 (1) (16) определяем оптимальные по критерию минимума среднеквадратичной ошибки параметры настройки П-регулятора для астатического объекта, при апериодическом регулировании.
При
![]() находим оптимальный коэффициент передачи
П-регулятора:
находим оптимальный коэффициент передачи
П-регулятора:![]() .
.