

78. Условие статической определимости кинематической цепи
Рассмотрим плоскую кинематическую цепь, у которой высшие кинематические пары отсутствуют (Р4=0). Пусть цепь включает n подвижных звеньев, для которых можно составить 3 уравнения статики, то есть 3 n Значит, 3n – общее число уравнений статики Пусть n звеньев образуют Р5 число пар 5-го класса Тогда 2 Р5 - общее число неизвестных кинематической цепи из n звеньев (2 – т.к. реакции в каждой кинемати-ческой паре имеем 2 неизвестных). Следовательно, 3n = 2Р5 - это и есть условие статической определимости кинематической цепи.
79. Порядок силового расчёта структурных групп
1)определяют силы инерции звеньев
2)производится числовой расчёт структурных групп асура(как групп статически определённых)
3)производится силовой расчёт ведущего звена
80. Силовой расчёт ведущего звена К плану мгновенных скоростей механизма, повернутому на 900 в сторону вращения, прикладываем все силы, действующие на механизм, и составляем уравнение моментов действующих сил относительно полюса.
81. Теорема Жуковского о жестком рычаге
Одним из способов определения приведенной силы Fпр является способ, предложенный Жуковским. Уравнение, из которого может быть найдена Fпр, основано на равенстве мощностей: F∑пр·VA·cos(F∑пр VA)=∑Fi·Vi·cos(Fi Vi).
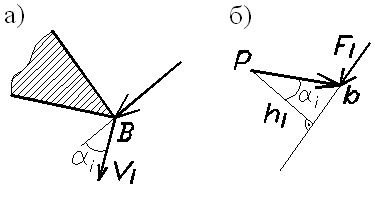
Рассмотрим какое-либо звено механизма, в т. В которого приложена сила Fi под углом αi к вектору скорости Vi этой точки (рис, а).
Мощность силы Fi равна:
Pi=Fi·Vi·cosαi.
Если вектор скорости т. В (план скоростей) повернуть на 90˚ и силу Fi приложить к концу вектора (в т. «b»), сохранив ее направление, то момент этой силы относительно полюса «p» будет равен (рис, б): Mi=Fi·hi=Fi·Vi·cosαi=Pi,
т.е. равен мощности силы Fi. Таким образом, Fi можно найти, повернув на 90˚ план скоростей и приложив к нему все внешние силы, включая силы инерции, в соответствующих точках и сохраняя их направления. Тогда из уравнения моментов такого рычага:
F∑пр·hпр=∑Fi·hi, получим: F∑пр=∑Fi·hi/hпр, где hi и hпр – кратчайшие расстояния от полюса плана скоростей до линии действия i-ой и приведенной сил.