Министерство образования и науки рф
УФИМСКИЙ ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФИЛИАЛ В Г. ИШИМБАЙ
Отчет по лабораторной работе №3
по предмету «Теория автоматического управления»
на тему: Исследование динамической точности систем
автоматического регулирования.
Выполнил: студент гр. АТП-308
Шарипов Д.В.
Приняла: Перевертайло Ю.В.
Ишимбай 2006
1. Цель работы
Целью данной работы является определение динамической точности систем автоматического регулирования путём нахождения коэффициентов ошибок, а также с помощью логарифмических амплитудно-частотных характеристик; приобретение навыков моделирования систем автоматического регулирования на ЭВМ с помощью пакета прикладных программ.
2. Основные сведения
Под системой автоматического регулирования понимают динамическую систему, в которой управление осуществляется с помощью сигнала разности между управляющим воздействием и действительным изменением регулируемой переменной.
Одной из наиболее важных характеристик системы автоматического регулирования является её динамическая точность, или ошибка в системе при подаче на неё управляющих и возмущающих воздействий. Известно, что последние делятся на два типа: регулярные и случайные. Обычно регулярные воздействия являются медленно меняющимися функциями времени по сравнению с длительностью переходного процесса системы. При этом точность системы регулирования определяется значением ошибки в установившемся режиме.
![]()
Статические и астатические системы автоматического регулирования
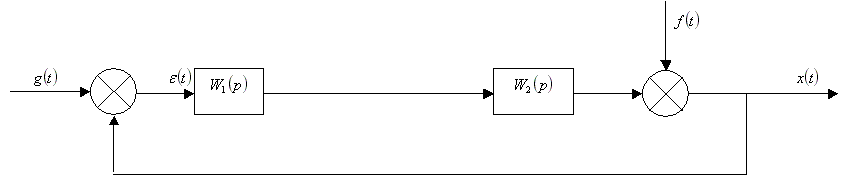
Большинство структурных схем систем автоматического регулирования с помощью структурных преобразований можно привести к схемам, показанным на рис. (3.1).

а)
б)

в)

г)
а, б – структурные схемы САР замкнутого цикла по отклонению и по возмущению;
в – структурная схема САР комбинированного цикла с компенсацией ошибки по управлению;
г – структурная схема САР комбинированного цикла с компенсацией ошибки по возмущению;
W1 – передаточная функция усилительного устройства или группы усилительных устройств и регуляторов;
W2 – передаточная функция исполнительного устройства и объекта регулирования
Из рисунка (3.1) динамическая ошибка системы равна:
![]() (3.1)
(3.1)
Установившаяся ошибка системы определяется из выражения:
![]() (3.2)
(3.2)
В
зависимости от значения
![]() определяется тип системы автоматического
регулирования – статическая или
астатическая.
определяется тип системы автоматического
регулирования – статическая или
астатическая.
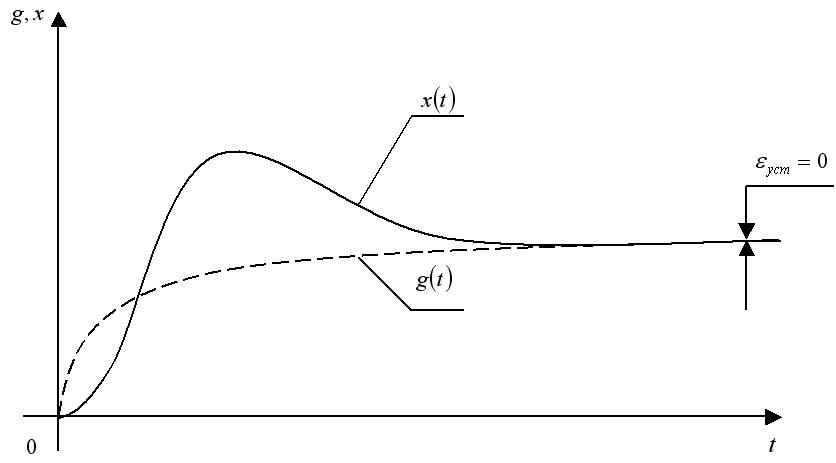
Система автоматического регулирования называется статической по отношению к управляющему воздействию, если при воздействии, стремящемся с течением времени к некоторому установившемуся значению, ошибка также стремится к постоянному значению, зависящему от величины управляющего воздействия (рис. 3.2, а).

Система автоматического регулирования называется астатической по отношению к управляющему воздействию, если при воздействии, стремящемуся к установившемуся значению, ошибка стремится к нулю независимо от величины воздействия (рис. 3.2, б).
К статическим системам автоматического регулирования относятся все устойчивые в разомкнутом состоянии системы. Если же система в разомкнутом состоянии имеет корни в центре координат, то такая система будет астатической. Порядок астатизма системы зависит от числа интегрирующих звеньев, входящих в систему и не охваченной жёсткой обратной связью. Передаточная функция системы в разомкнутом состоянии может быть представлена в виде:
![]()
где
n
- порядок астатизма; при
![]() система является статической. То же
можно сказать относительно систем
автоматического регулирования,
статических либо астатических по
возмущаемому воздействию.
система является статической. То же
можно сказать относительно систем
автоматического регулирования,
статических либо астатических по
возмущаемому воздействию.
Можно создать систему автоматического регулирования, являющейся астатической как по управляющему воздействию, так и по возмущающему воздействию.
Коэффициенты ошибок
Для определения ошибки как функции времени воспользуемся её изображением по Лапласу:
![]() (3.3)
(3.3)
где
![]() – передаточная функция замкнутой
системы относительно ошибки по
управляющему воздействию;
– передаточная функция замкнутой
системы относительно ошибки по
управляющему воздействию;
![]() – передаточная функция разомкнутой
системы;
– передаточная функция разомкнутой
системы;
![]() – изображение по Лапласу управляющего
воздействия.
– изображение по Лапласу управляющего
воздействия.
Передаточная функция ошибки может быть разложена в ряд Маклорена по степени p:
![]() (3.4)
(3.4)
где
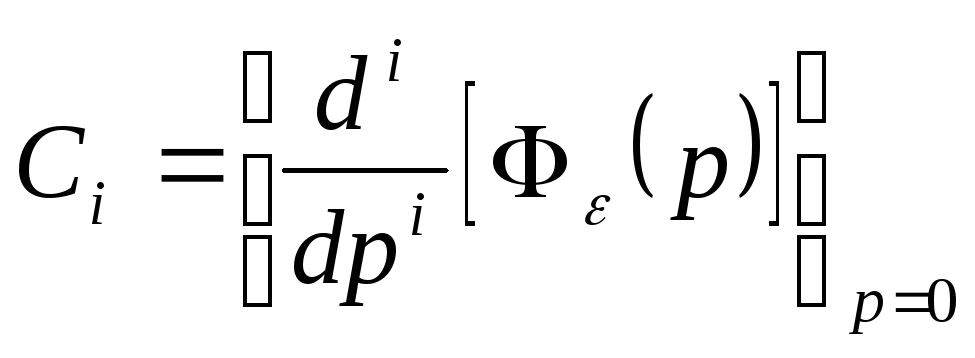 (3.5)
(3.5)
C учётом (3.4) выражение (3.3) для изображения ошибки можно представить в виде:
![]() (3.6)
(3.6)
Следовательно,
![]() (3.7)
(3.7)
Разложение
передаточной функции ошибки в ряд
производилось относительно точки
![]() ,
что соответствует большим значениям
t. Значит выражение (3.7)
становится справедливым лишь спустя
некоторое время после приложения
воздействия, т.е. представляет собой
установившуюся (вынужденную) составляющую
ошибки.
,
что соответствует большим значениям
t. Значит выражение (3.7)
становится справедливым лишь спустя
некоторое время после приложения
воздействия, т.е. представляет собой
установившуюся (вынужденную) составляющую
ошибки.
Задача получения требуемой точности обычно формулируется на основе требований к величине ошибки при управляющих воздействиях определённого вида, в той или иной степени характерных для работы системы. Если найденная по (3.7) составляющая ошибки в течение всего интервала изменения не выходит за допустимые пределы
![]() ,
(3.8)
,
(3.8)
то для данного управляющего воздействия требуемая динамическая точность обеспечивается.
В
тех случаях, когда управляющее воздействие
постоянно
![]() ,
все члены ряда кроме первого равны нулю.
,
все члены ряда кроме первого равны нулю.
Поэтому статическая ошибка воспроизведения равна
![]() (3.9)
(3.9)
Постоянные
![]() называются
коэффициентами ошибок;
называются
коэффициентами ошибок;
C0 – коэффициент ошибки по воздействию;
C1 – по скорости изменения воздействия;
C2 – по ускорению и т.д.
Передаточная функция системы в разомкнутом состоянии всегда может быть приведена к виду:
![]() (3.10)
(3.10)
Используя (3.10), (3.4), (3.5), определим несколько первых коэффициентов ошибок для различных систем:
1. Система статическая (n = 0)

![]() (3.11)
(3.11)
![]()
В
формуле (3.11) k – коэффициент
усиления системы в разомкнутом состоянии.
При условии
![]() выражение (3.7) можно приближенно
представить в виде
выражение (3.7) можно приближенно
представить в виде
![]() (3.12)
(3.12)
где
![]() – коэффициент астатизма статической
системы;
– коэффициент астатизма статической
системы;
Dw - добротность статической системы по скорости;
De - добротность статической системы по ускорению.
Эти коэффициенты связаны следующими соотношениями с коэффициентами ошибок:
![]()
![]()
![]() (3.13)
(3.13)
2. Система астатическая (n = 1)
![]()
![]() (3.14)
(3.14)
Тогда выражение (3.7) приближённо можно записать:
![]() (3.15)
(3.15)
где Dw и De - коэффициенты добротностей по скорости и ускорению для системы с астатизмом первого порядка. Коэффициенты ошибок связаны с добротностями по (3.7) и (3.15):
![]()
![]()
![]() (3.16)
(3.16)
3. Система автоматического регулирования с астатизмом второго порядка (n = 2)
![]()
![]() (3.17)
(3.17)
Запишем 3.7 приближенно:
![]() (3.18)
(3.18)
где De - коэффициенты добротности по ускорению системы с астатизмом второго порядка. Очевидно, что:
![]() (3.19)
(3.19)
Можно отметить, что формулы (3.12), (3.15), (3.18) пригодны для вычисления ошибок в системах автоматического регулирования при любых сигналах, поступающих на их вход, когда спектр входного сигнала заключён в полосе низких частот (до w1).
Выражения (3.14) и (3.17) подтверждают сказанное о том, что в астатических системах статическая ошибка отсутствует.
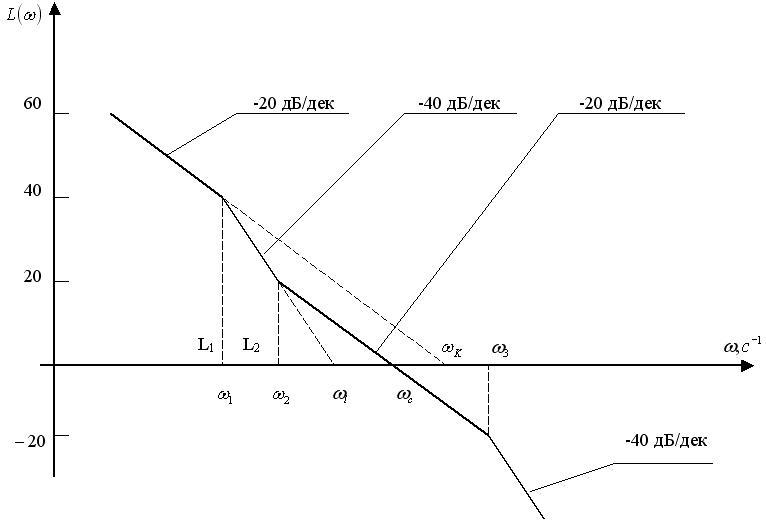
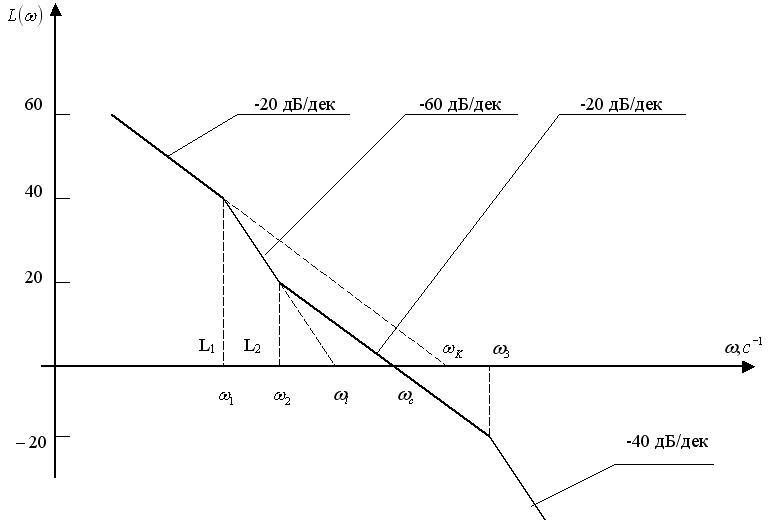
Определение коэффициентов ошибок в системах автоматического регулирования с помощью ЛАХ
Суть определения коэффициентов ошибок по этому методу заключается в том, что последние зависят от постоянных времени звеньев системы, с которыми однозначно связаны сопрягающие частоты ЛАХ разомкнутой системы.
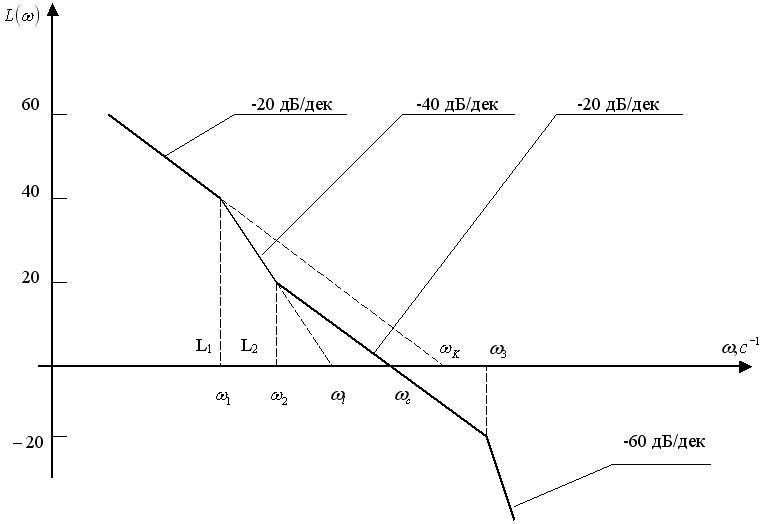
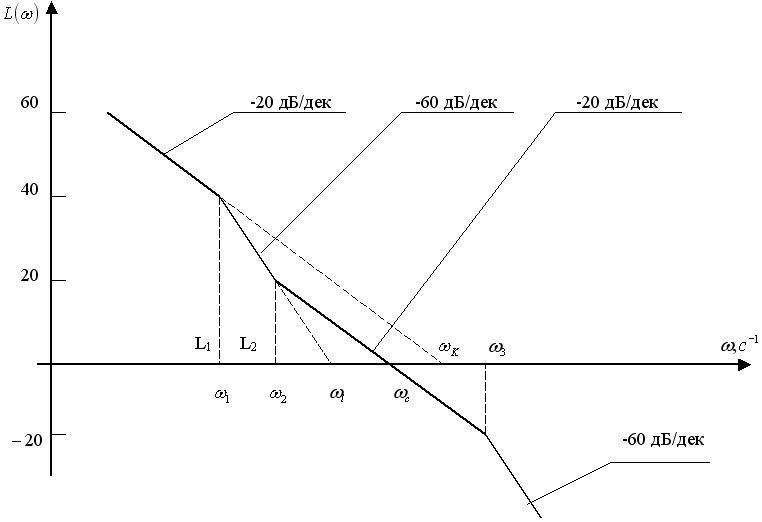
На рис. (3.3) показаны характеристики четырех типов систем автоматического регулирования с астатизмом первого порядка.
1)
2)
3)
4)
Передаточные функции этих систем и коэффициенты добротности Dw и De приведены в таблице (3.1).
|
Тип системы (рис. 3.3) |
Передаточная функция |
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|

Коэффициент
добротности по скорости для систем всех
типов:
![]()
Однако эти величины можно рассчитывать приближённо через частоты wk и wl, которые определяются непосредственно по ЛАХ:
![]() ,
,
![]() – для системы 1 типа.
(3.20)
– для системы 1 типа.
(3.20)
![]() –для системы 2 типа.
–для системы 2 типа.
В ряде практических задач передаточные функции разомкнутых систем имеют вид, отличный от приведённого в таблице (3.1). Например:
![]() (3.21)
(3.21)
Тогда вместо постоянных времени T3 и T4 ,T1 и T2 можно ввести:
![]()
![]()
приводя в этом случае передаточную функцию (3.21) ко второму типу (рис 3.3):
Ошибка в такой замене при построении ЛАХ не превышает 2дБ.
Инвариантность системы к воздействию
Идеальной
в смысле точности воспроизведения была
бы система, которая в точности
воспроизводила управляющее воздействие.
Такие свойства системы называют
инвариантностью к сигналу (независимостью
от сигнала). Если система инвариантна
по отношению к любому воздействию,
независимо от его характера, то имеет
место полная инвариантность. Для
получения полной инвариантности
необходимо, чтобы передаточная функция
ошибки по управляющему воздействию
была тождественно равна нулю. Это
требование полной инвариантности
приводит к необходимости выполнения
условия
![]() .
Однако условие неосуществимо не только
в силу технической трудности реализации
большого коэффициента усиления системы
k, при котором
.
Однако условие неосуществимо не только
в силу технической трудности реализации
большого коэффициента усиления системы
k, при котором
![]() ,
но и вследствие нарушения устойчивости
при увеличении коэффициента усиления.
Можно говорить либо о приближённой
инвариантности («инвариантности до
e»),
либо о частичной инвариантности.
,
но и вследствие нарушения устойчивости
при увеличении коэффициента усиления.
Можно говорить либо о приближённой
инвариантности («инвариантности до
e»),
либо о частичной инвариантности.
При частичной инвариантности обеспечивается равенство нулю лишь вынужденной составляющей ошибки и только при воздействиях определённого вида. Примером частичной инвариантности может рассматриваться случай, когда в системе, обладающей астатизмом n-го порядка, приложено воздействие, не имеющее производных выше n-1 порядка. При этом вынужденная составляющая ошибки равна нулю, так как за счёт астатизма системы отсутствуют коэффициенты ошибок от С0 до Сn-1.
Частичная инвариантность к постоянному во времени воздействию (уменьшение статической ошибки) осуществляется за счёт обеспечения астатизма, а именно введения в систему интегрирующих звеньев. При этом, для компенсации возмущающего воздействия, интегрирующие звенья вводятся в систему до точки его приложения.
Однако обязательно требуется проверка устойчивости системы, так как могут оказаться необходимыми меры по сохранению запасов устойчивости системы автоматического регулирования.
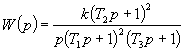
Астатизм системы можно получить с помощью включения в прямую цепь изодромного звена с передаточной функцией
![]()
где
![]() – постоянная времени
изодрома.
– постоянная времени
изодрома.
Если Tn достаточно велика, то запас устойчивости может быть сохранен неизменным. Уменьшение передаточного коэффициента разомкнутой системы должно быть скомпенсировано увеличением коэффициента усиления усилителя.
Астатизм систем автоматического регулирования относительно задающего воздействия можно обеспечить более простыми способами: неединичной обратной связью и масштабированием.
Если в системе (рис. 3.4, а)
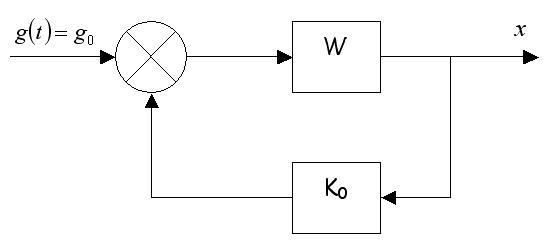
выполнить
обратную связь с ,
где k – передаточный
коэффициент прямой цепи системы, то
![]() ,
и система будет астатической относительно
задающего воздействия.
,
и система будет астатической относительно
задающего воздействия.
В системе (рис. 3.4, б)

при
![]() ,
где к – передаточный коэффициент
разомкнутой системы, получаем
,
где к – передаточный коэффициент
разомкнутой системы, получаем
![]() ,
и система является также астатической
относительно задающего воздействия.
,
и система является также астатической
относительно задающего воздействия.
Повышение точности системы автоматического регулирования путём применения комбинированного управления
Точность систем повышается путём компенсации влияния сигналов управления и возмущения за счёт применения комбинированного управления. В результате этого увеличивается порядок астатизма. Структурные схемы систем автоматического управления с комбинированным управлением показаны на рисунке (3.1, в,г). Первая из них компенсирует действие управляющего сигнала, вторая – действие возмущения.
Составим передаточные функции обоих систем регулирования относительно ошибки.
Для системы, изображённой на рисунке (3.1, в), имеем:
![]() (3.22)
(3.22)
Нетрудно показать, что выбрав
![]() (3.23)
(3.23)
получим
![]() .
.
Таким образом, выбирая (3.23), удаётся создать систему, полностью инвариантную к управляющему воздействию, т.е. получить ошибку, не зависящую от управляющего воздействия на систему. Однако практически довольно трудно обеспечить полное удовлетворение условию (3.23). Поэтому выбирают другую компенсирующую передаточную функцию Wk(p), которая повышает порядок астатизма системы.
Перейдём
к рассмотрению систем автоматического
регулирования по рисунку (3.1, г), считая
что
![]() .
Тогда
.
Тогда
![]() и передаточная функция системы
относительно ошибки по возмущаемому
воздействию запишется так:
и передаточная функция системы
относительно ошибки по возмущаемому
воздействию запишется так:
![]() (3.24)
(3.24)
Нетрудно найти из (3.24) условие инвариантности в виде:
![]() (3.25)
(3.25)
Итак, при соблюдении условия (3.25) имеем систему, полностью инвариантную к возмущающему воздействию. Однако на практике обеспечить условие (3.25) так же трудно, как и условие (3.23), т.к. физически реализуема лишь такая Wk(P), у которой степень числителя не выше степени знаменателя. При частичном удовлетворении условию (3.25) удаётся повысить порядок астатизма систем относительно возмущающего воздействия.
Следует отметить, что компенсирующая цепь не влияет на устойчивость замкнутого контура, однако она сама должна быть устойчивой.
Такое комбинированное регулирование используется в системах для уменьшения влияния сильного возмущения, если это возмущение доступно измерению.
Рассмотрим
пример получения частичной инвариантности
систем. Исходная система представленная
на рисунке (3.5, а) имеет астатизм первого
порядка и
![]() .
.
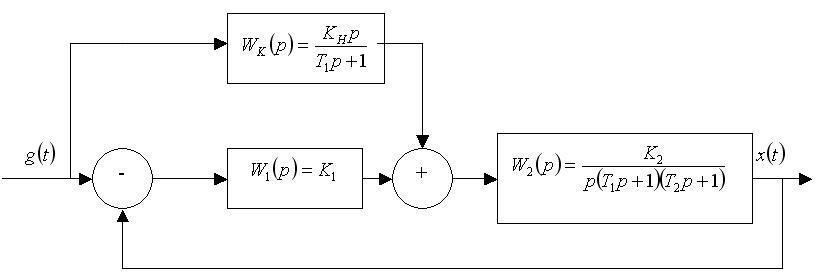
Поставив задачу частичного удовлетворения условию (3.23) примем:
![]()
![]()
при этом удаётся повысить астатизм системы до n = 2 и получить С1 = 0.
В системе на рисунке (3.5, б) при условии, что Kk = 1/K1 и T2 + Tk = T1, удаётся повысить точность системы по возмущающему воздействию за счёт увеличения порядка астатизма системы на две единицы.

Вид передаточной функции позволяет судить о том, является ли система статической или астатической . Причем рассматривается астатизм системы как по управляющему, так и по возмущающему воздействию.
Для того, чтобы рассматривать астатизм системы вводится понятие передаточной функции ошибки по управляющему и возмущающему воздействию.
Пусть система состоит из регулятора и объекта управления
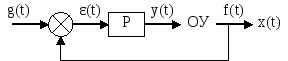
Пусть она описывается линейными дифференциальными уравнениями, которые подверглись преобразованию Лапласа:

Решая данную систему, можно получить уравнение для выходного сигнала системы:

Если в качестве выходной величины рассматривать ошибку, то при решении системы уравнений получим уравнение для нахождения ошибки:
![]()
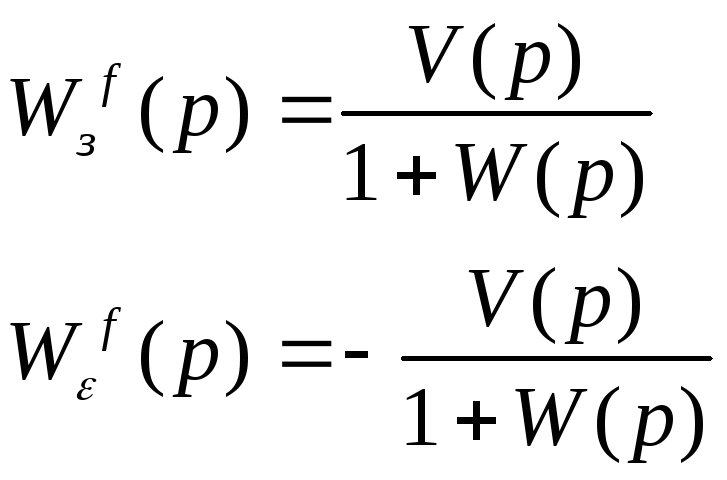
По управляющему воздействию:
![]()
Тогда с учетом * и ** получим:
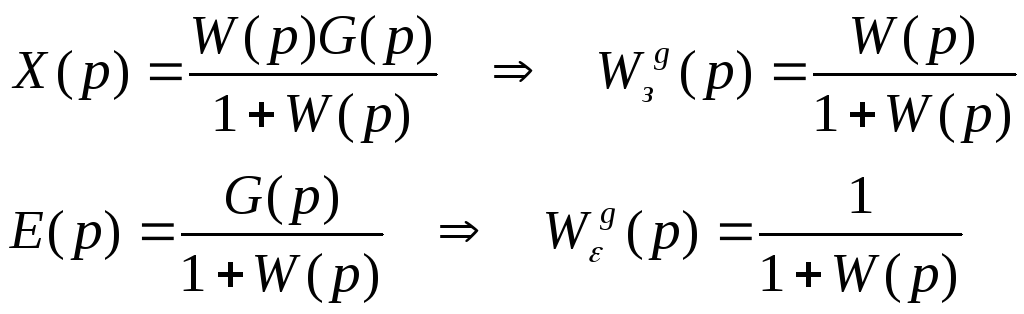
По возмущающему воздействию:
![]()
Тогда

![]()