

Министерство образования и науки рф
УФИМСКИЙ ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФИЛИАЛ В Г. ИШИМБАЙ
Отчет по лабораторной работе №4
по предмету «Теория автоматического управления»
на тему: Анализ качества и синтез систем автоматического регулирования.
Выполнил: студент гр. АТП-308
Шарипов Д.В.
Приняла: Перевертайло Ю.В.
Ишимбай 2006
1. Цель работы
Целью данной работы является приобретение студентами навыков анализа и синтеза систем автоматического регулирования с частотными оценками их основных показателей качества и заданной точности, а также опыта исследования систем с использованием пакета прикладных программ.
2. Основные сведения
Устойчивость является необходимым, но недостаточным условием работоспособности системы автоматического регулирования. Правильно спроектированная система автоматического регулирования должна отвечать заданным точности и плавности протекания процесса под влиянием управляющего или возмущающего воздействия, а именно: определённым качествам регулирования.
Пусть система (рис. 4.1, а)
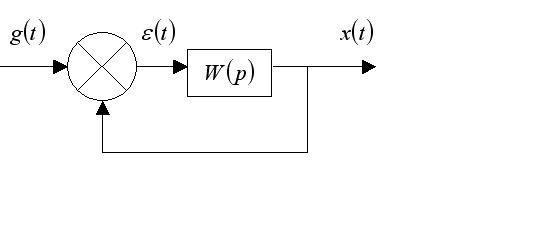
находится
в состоянии переходного процесса
отработки единичного воздействия
![]() ,
,
![]() (4.1)
(4.1)
где
![]() –
установившаяся (вынужденная) составляющая
переходного процесса, обусловленная
законом изменения входного воздействия
–
установившаяся (вынужденная) составляющая
переходного процесса, обусловленная
законом изменения входного воздействия
![]() ;
;
![]() –
свободная составляющая переходного
процесса, соответствующая общему решению
однородного уравнения системы,
обусловленная свойствами системы.
–
свободная составляющая переходного
процесса, соответствующая общему решению
однородного уравнения системы,
обусловленная свойствами системы.
Как
известно, по![]() определяют
точность системы, а показатели качества
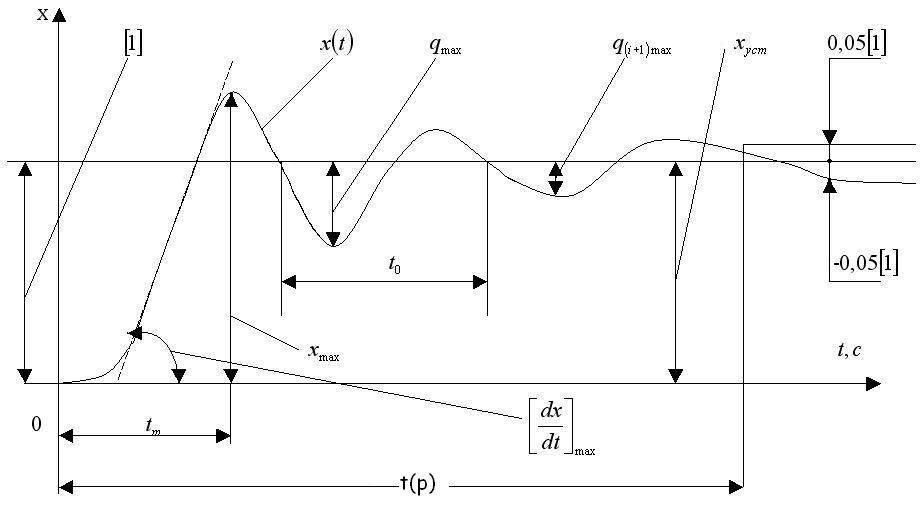
переходного процесса (рис. 4.1, б)
определяют
точность системы, а показатели качества
переходного процесса (рис. 4.1, б)
зависят
от характера его протекания, а фактически
от вида
![]() .
.
Показатели качества процессов регулирования
Первый показатель качества – максимальное перерегулирование:
![]() (4.2)
(4.2)
где
![]() - максимальное значение регулируемой
величины (рис. 4.1, б).
- максимальное значение регулируемой
величины (рис. 4.1, б).
![]() – установившееся значение регулируемой
величины.
– установившееся значение регулируемой
величины.
Второй
показатель качества позволяет оценить
быстродействие системы автоматического
регулирования – время регулирования
![]() .
Учитывая, что полное затухание происходит
лишь при
.
Учитывая, что полное затухание происходит
лишь при
![]() ,
условно принимают за момент окончания
переходного процесса точку пересечения
графика этого процесса с линиями,
соответствующими
,
условно принимают за момент окончания
переходного процесса точку пересечения
графика этого процесса с линиями,
соответствующими
![]() 5%-ному
отклонению от установившегося значения.
5%-ному
отклонению от установившегося значения.
Третий
показатель качества характеризует
число колебаний
![]() регулируемой величины
регулируемой величины
![]() в течение времени переходного процесса
в течение времени переходного процесса
![]() .
.
Наряду с этими показателями качества при проектировании системы автоматического регулирования часто используют следующие характеристики.
Собственная частота колебаний системы:
![]() (4.3)
(4.3)
где
![]() – период собственных колебаний.
– период собственных колебаний.
Логарифмический декремент
затухания системы
![]() ,
характеризующий быстроту затухания
колебательного процесса,
,
характеризующий быстроту затухания
колебательного процесса,
![]() (4.4)
(4.4)
где
![]() – две амплитуды для
расположенных рядом экстремумов кривой
переходного процесса.
– две амплитуды для
расположенных рядом экстремумов кривой
переходного процесса.
Максимальная
скорость отработки регулируемой величины
![]() .
.
Для каждой системы автоматического регулирования, имеющей колебательный переходный процесс, на основе указанных критериев качества можно установить область допустимых отклонений регулируемой величины.
Итак,
основные показатели качества
![]() определяются по кривой переходного
процесса регулируемой величины. Однако
их можно определить и косвенными
методами, например, по частотным
характеристикам разомкнутой системы.
определяются по кривой переходного
процесса регулируемой величины. Однако
их можно определить и косвенными
методами, например, по частотным
характеристикам разомкнутой системы.
Частотные оценки качества системы автоматического регулирования
Частотные
методы оценки показателей качества
систем автоматического регулирования
получили широкое распространение в
инженерной практике. Математической
основой этих методов является обратное
преобразование Лапласа (или Фурье),
которое однозначно связывает выходной
сигнал
![]() и вещественную частотную характеристику
замкнутой системы
и вещественную частотную характеристику
замкнутой системы
![]() :
:
 (4.5)
(4.5)
При
этом на входе системы действует
![]() ,
а начальные условия являются нулевыми.
,
а начальные условия являются нулевыми.
Так,
если известна зависимость
![]() (рис. 4.2),
(рис. 4.2),
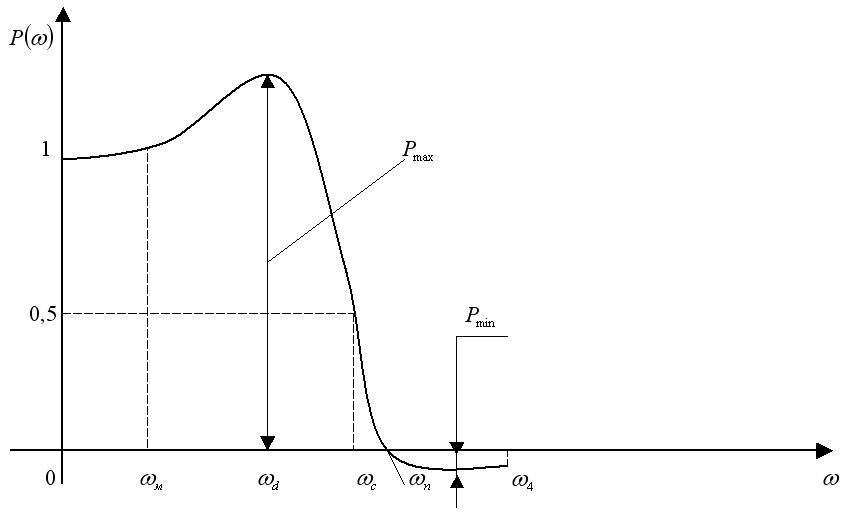
то
можно определить установившееся значение
![]() :
:
![]() (4.6)
(4.6)
Зависимость
![]() и пик вещественной частотной характеристики
замкнутой системы связаны следующим
соотношение:
и пик вещественной частотной характеристики
замкнутой системы связаны следующим
соотношение:
![]() (4.7)
(4.7)
Время
переходного процесса
![]() зависит от длин интервала положительности
зависит от длин интервала положительности
![]() :
:
![]()
т.е.
если
![]() на интервале
на интервале
![]() ,
то
,
то
![]() заведомо больше, чем
заведомо больше, чем
![]() .
.
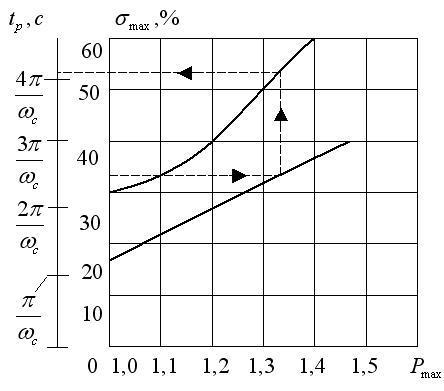
Для
большинства систем, у которых зависимость
![]() имеет вид, показанный на рисунке (4.2)
(
имеет вид, показанный на рисунке (4.2)
(![]() ),
показатели качества оценивают по
номограммам В.В. Солодовникова (рис.
4.3):
),
показатели качества оценивают по
номограммам В.В. Солодовникова (рис.
4.3):
![]() ;
;
![]()
Рекомендуемые нормы запасов устойчивости по модулю и фазе для систем с заданными показателями качества
Известно, что вещественная частотная характеристика замкнутой системы и логарифмические частотные характеристики разомкнутой системы однозначно связаны.
Следовательно, для каждой ЛАХ и ЛФХ существуют вполне определённые показатели качества переходного процесса.
Интервал
частот от
![]() до
до
![]() (рис. 4.4),
(рис. 4.4),
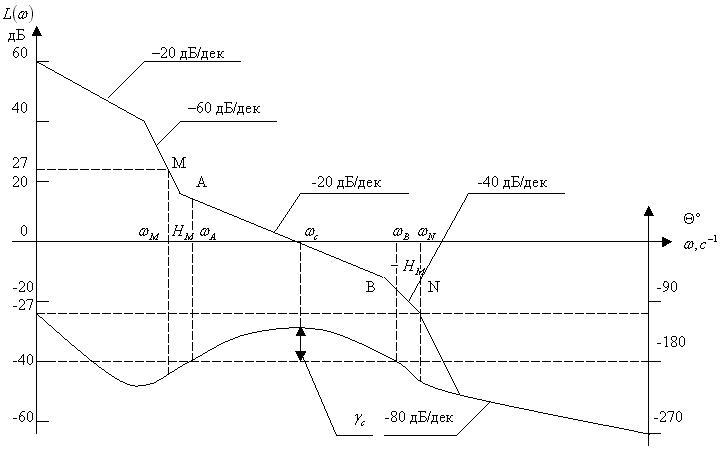
определяющий
показатели качества системы, называется
существенным. Он разделяет ЛАХ на три
зоны: низкочастотную
![]() ,
среднечастотную
,
среднечастотную
![]() и
высокочастотную
и
высокочастотную
![]() .
Значения граничных частот
.
Значения граничных частот
![]() и
и
![]() приближённо определяются выражениями:
приближённо определяются выражениями:
![]()
![]()
Частоты
![]() и
и
![]() соответствуют запасу устойчивости по
модулю
соответствуют запасу устойчивости по
модулю
![]() и
и
![]() .
.
В таблице представлены нормы запасов устойчивости по модулю и фазе, гарантирующие показатели качества для длительно работающих систем автоматического регулирования.
При
проектировании систем автоматического
регулирования необходимо учитывать,
что чем выше частота среза
![]() в системе, тем больше вероятность того,
что не будут учтены малые постоянные
времени объектов регулирования. Чтобы
этого не случилось, необходимо увеличивать
запасы устойчивости по фазе и модулю с
ростом частоты среза. Сказанное отражено
в таблице (4.1)
в системе, тем больше вероятность того,
что не будут учтены малые постоянные
времени объектов регулирования. Чтобы
этого не случилось, необходимо увеличивать
запасы устойчивости по фазе и модулю с
ростом частоты среза. Сказанное отражено
в таблице (4.1)
-
Тип системы
Показатели устойчивости для диапазонов частот
От 0,01 до 100
От 100 до 1000
От 1000 до 10000
От 10000 и более
Для систем с высокими показателями качества

45
50
55
60
HМ, дБ
16
18
20
22
-HМ, дБ
14
16
18
20
Для систем с невысокими показателями качества

30
35
40
45
HМ, дБ
12
14
16
18
-HМ, дБ
10
12
14
16
Приведённые нормы запасов устойчивости справедливы как для внутренних контуров, так и для собственно систем автоматического регулирования.
Синтез систем автоматического регулирования при регулярных воздействиях
Сущность задачи синтеза заключается в таком выборе структурной схемы системы и её параметров, а также таком конструктивном решении, при котором обеспечиваются требуемые показатели качества и точности процессов регулирования, а сама система состоит из наиболее простых устройств управления.
Всю систему автоматического регулирования можно разделить на две части: объект регулирования, исполнительное устройство, усилитель мощности и измерительное устройство – неизменяемая часть системы, и корректирующее устройство с согласующим усилителем – изменяемая часть системы.
В значительной степени определяющими при выборе устройств неизменяемой части системы являются стоимость, надёжность, масса и габаритные размеры. Поэтому задачу синтеза системы автоматического регулирования обычно сводят к выбору лишь легко изменяемых устройств, а именно: усилительных и корректирующих устройств.
Пусть известны тип и параметры устройств, входящих в неизменяемую часть системы. Тогда синтез системы осуществляется в следующем порядке:
1. Составляют упрощённую структурную схему системы и выбирают схему и место включения корректирующих и усилительных устройств;
2. По критерию качества или требованиям на показатели качества и точности регулирования находят желаемую логарифмическую частотную характеристику разомкнутой системы;
3. Определяют тип и параметры корректирующих и усилительных устройств системы;
4. Находят конструктивное решение корректирующих и усилительных устройств системы и составляют окончательную структурную схему системы автоматического регулирования;
5. Определяют динамические характеристики системы и сравнивают их с соответствующими данными технических условий. Очевидно, принятый порядок синтеза может привести к неоднозначному решению задачи.
В системах автоматического регулирования возможно применение корректирующих устройств последовательного или параллельного действия. Системы автоматического регулирования с последовательной коррекцией имеют большую частоту среза, что предъявляет высокие требования к динамическим характеристикам устройств неизменяемой части и к отсутствию в системе сигналов шумов и помех. Корректирующие устройства последовательного действия являются наиболее простыми, однако при выходе из строя конденсаторов или резисторов этого устройства вся система регулирования становится неработоспособной.
Параллельные корректирующие устройства снижают частоту среза системы и делают систему малочувствительной к помехам и шумам. Совместным включением последовательного и параллельного корректирующих устройств можно получить высококачественную систему автоматического регулирования.
Построение желаемой амплитудной характеристики системы регулирования
Желаемая ЛАХ определяется показателями качества и точности процессов регулирования.
Низкочастотная её часть обусловливает точность воспроизведения медленно изменяющихся воздействий, по ней можно определить добротности по скорости и ускорению и статическую ошибку системы [см. лабораторную работу №3: табл. 3.1; рис. 3.3; выражения (3.13),(3.16),(3.20)] .
Частота среза системы определяется номограмм В.В. Солодовникова (рис. 4.3):
По
![]() определяем
определяем
![]() ,
а по
,
а по
![]() находим значение
находим значение
![]() .
Затем при заданном
.
Затем при заданном
![]() определяем
определяем
![]() .
.
Для наиболее простой реализации последовательного корректирующего устройства изломы наклонов высокочастотного участка желаемой ЛАХ и ЛАХ неизменяемой части системы должны совпадать.
В
ряде случаев в синтезируемых САР
приходится уменьшать частоту среза
![]() ,например,
по условиям качества при случайных
воздействиях на систему. Тогда
целесообразно строить желаемую ЛАХ с
низкочастотной частью, имеющей
,например,
по условиям качества при случайных
воздействиях на систему. Тогда
целесообразно строить желаемую ЛАХ с
низкочастотной частью, имеющей
![]() (рис. 3.3, 2,4).
(рис. 3.3, 2,4).
В
случаях, когда требуется повысит точность
системы регулирования, целесообразно
строить желаемую ЛАХ с наклонами
![]() т.е. увеличивать порядок астатизма, а
далее - соответственно с наклонами
неизменяемой части.
т.е. увеличивать порядок астатизма, а
далее - соответственно с наклонами
неизменяемой части.
Синтез последовательных корректирующих устройств
Передаточную функцию разомкнутой САР с последовательным корректирующим устройством можно записать:
![]() (4.11)
(4.11)
или
![]() (4.12)
(4.12)
где
![]() – передаточная функция последовательного
корректирующего устройства;
– передаточная функция последовательного
корректирующего устройства;
![]() –коэффициент усиления
согласующего усилителя. При подстановке
в (4.11) и(4.12)
–коэффициент усиления
согласующего усилителя. При подстановке
в (4.11) и(4.12)
![]() получим:
получим:
![]() (4.13)
(4.13)
или
 (4.14)
(4.14)
Если
добротность САР
![]() превышает коэффициент усиления
неизменяемой части
превышает коэффициент усиления
неизменяемой части![]() ,
то для определения корректирующего
устройства необходимо поднять ЛАХ
неизменяемой части до уровня желаемой
характеристики, а затем графически
найти
,
то для определения корректирующего
устройства необходимо поднять ЛАХ
неизменяемой части до уровня желаемой
характеристики, а затем графически
найти![]() ,
как это показано на рисунке (4.5, а).
Коэффициент Ку
определяется как:
,
как это показано на рисунке (4.5, а).
Коэффициент Ку
определяется как:
![]() (4.15)
(4.15)
По точкам излома ЛАХ определяют постоянные времени.