лабораторная работа / laboratornaya_rabota_sistema_avtomaticheskogo_regulirovaniya
.docxВариант 16.
Дано:
тип системы – «В»;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
; ;
;
 (двигателя привода ОГ);
(двигателя привода ОГ);

 ;
;
 (двигателя шпинделя);
(двигателя шпинделя);
 ;
;
 .
.
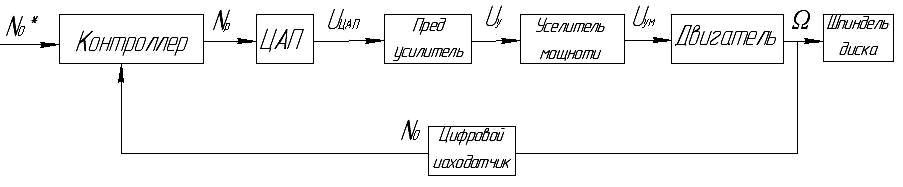
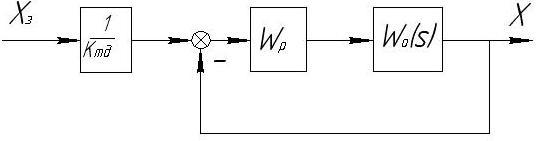
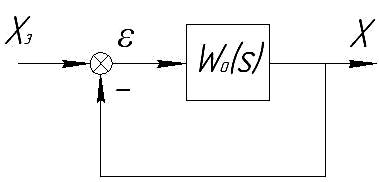
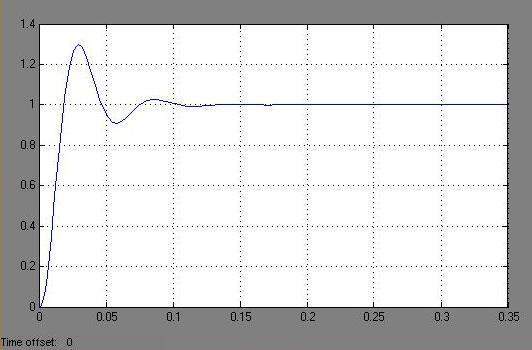
Система автоматического регулирования скорости вращения оптического диска
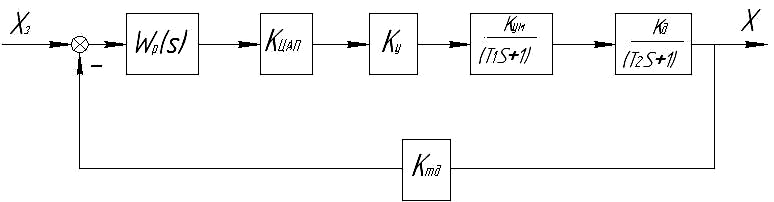
Вынесем Kтд из обратной связи:

 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
При
 ошибка должна быть
ошибка должна быть
 .
Закон изменения сигнала должна быть
.
Закон изменения сигнала должна быть
 .
.
Выберем
степень астатизма
 .
.
Относительная
ошибка
 .
.
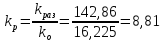
Коэффициент
передачи разомкнутой системы
 ,
,
 .
.

При Т1=0,1, Т2=0,01, получим:
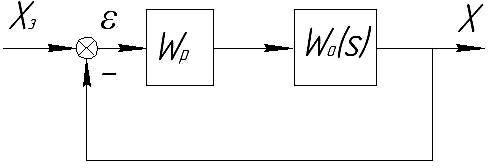
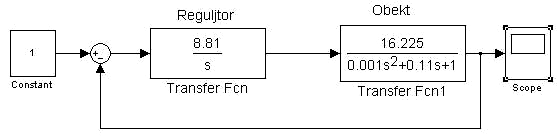
Введем регулятор:


 =>
=>
 ,
при
,
при




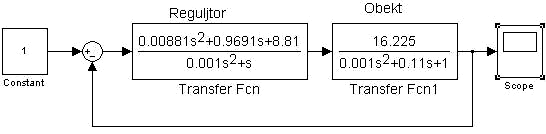
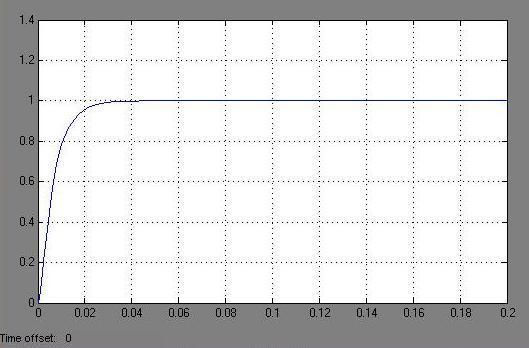
Решение с помощью MatLab:
W=tf([142.86],[0.001 0.11 1 0])
Transfer function:
142.9
------------------------
0.001 s^3 + 0.11 s^2 + s
U=tf([142.86],[ 0.00001 0.011 1 0])
Transfer function:
142.9
--------------------------
1e-005 s^3 + 0.011 s^2 + s
V=tf([142.86],[ 0.001 1 0])
Transfer function:
142.9
-------------
0.001 s^2 + s
bode(W,U,V),grid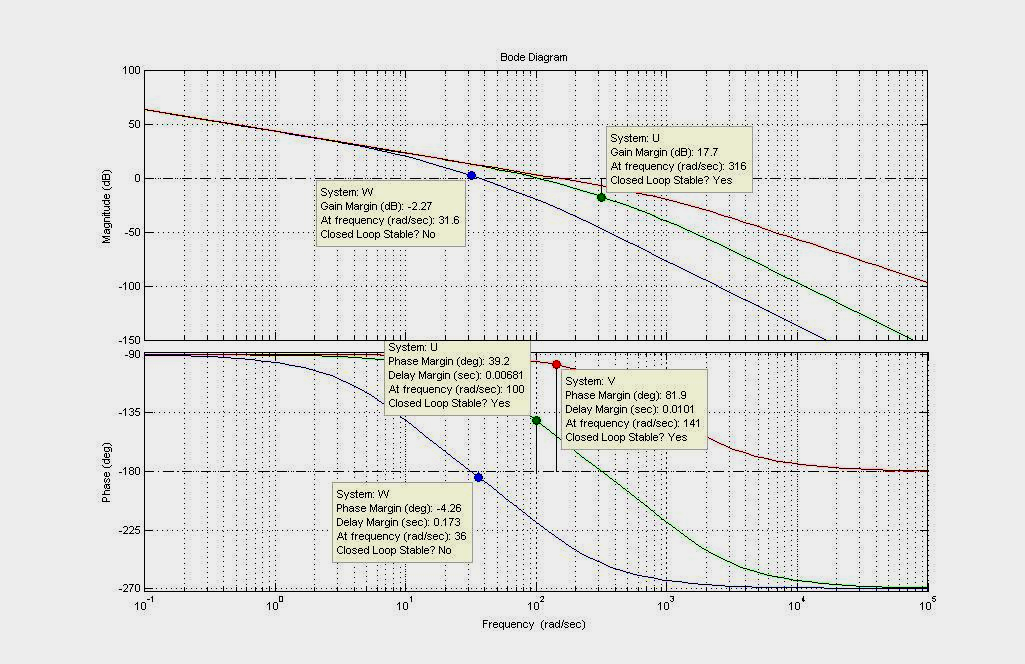
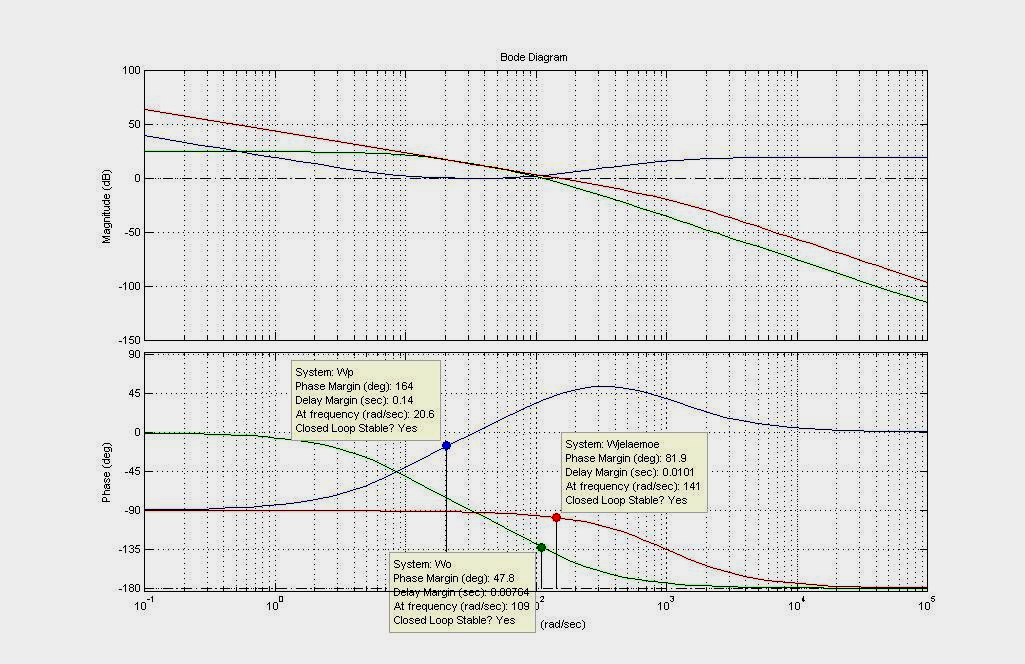
Построим графики желаемого ЛАХ и ЛФХ, ЛАХ и ЛФХ объекта и регулятора.
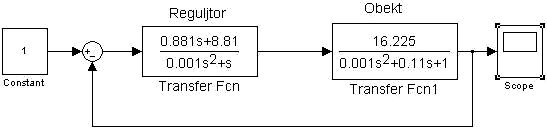
Wp=tf([0.00881 0.9691 8.81],[0.001 1 0])
Transfer function:
0.00881 s^2 + 0.9691 s + 8.81
-----------------------------
0.001 s^2 + s
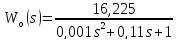
Wo=tf([16.225],[0.001 0.11 1])
Transfer function:
16.23
----------------------
0.001 s^2 + 0.11 s + 1
Wjelaemoe=tf([142.86],[0.001 1 0])
Transfer function:
142.9
-------------
0.001 s^2 + s
bode(Wp,Wo,Wjelaemoe),grid