

лабораторная работа / отчет_lab_2
.docx1.1.
Структурная чфема исследуемой
автоматической системы с заданными
значениями параметров звена
 .
.
Wp(p)
Woc(p)








g y
±
Консервативное звено
|
k |
T |
Вид обратной связи |
|
1 |
1 |
Гибкая ОС (идеальное дифференцирование) |

1.2.
Аналитические выражения, показывающие
изменения параметров звена при охвате его гибкой отрицательной
обратной связью.
при охвате его гибкой отрицательной
обратной связью.

Woc (p)








g(t) x y(t)
(-1)
y1
Передаточная функция замкнутой автоматической системы имеет вид

При отрицательной обратной связи
Упростим

Видим что характер звена изменился
1.3.
Аналитические выражения, характеризующие
процесс исследования и его результаты
замкнутой автоматической системы на
устойчивость при охвате звена
 гибкой отрицательной обратной связью.
гибкой отрицательной обратной связью.
Т.к.
 ,
мы можем сделать вывод, что система
устойчива.
,
мы можем сделать вывод, что система
устойчива.
1.4.
Аналитические выражения, показывающие
изменения параметров звена при охвате его гибкой положительной
обратной связью.
при охвате его гибкой положительной
обратной связью.
Для
замкнутой автоматической системы,
охваченной положительной обратной
связью
 равно
равно
Видим что характер звена изменился.
1.5.
Аналитические выражения, характеризующие
процесс исследования и его результаты
замкнутой автоматической системы на
устойчивость при охвате звена
 гибкой положительной обратной связью.
гибкой положительной обратной связью.
Т.к.
 ,
мы можем сделать вывод, что система
неустойчива.
,
мы можем сделать вывод, что система
неустойчива.
1.6. Соображения по выбору шага и интервала интегрирования.
Шаг интегрирования и величину интервала интегрирования выбираем из соображений наилучшего и рационального построения графиков.
1.7. Листинг фрагмента программы, относящегося к моделируемой автоматической системе.
Моделирование исходного звена
k11:=u2*dt;
k12:=(-(2*ksi/T)*u2-(1/(T*T))*u1+(k/(T*T))*g)*dt;
k21:=(u2+(k12/2))*dt;
k22:=(-(2*ksi/T)*(u2+k12/2)-(1/(T*T))*(u1+k11/2)+(k/(T*T))*g)*dt;
k31:=(u2+(k22/2))*dt;
k32:=(-(2*ksi/T)*(u2+k22/2)-(1/(T*T))*(u1+k21/2)+(k/(T*T))*g)*dt;
k41:=(u2+k32)*dt;
k42:=(-(2*ksi/T)*(u2+k32)-(1/(T*T))*(u1+k31)+(k/(T*T))*g)*dt;
u1:=u1+(k11+2*k21+2*k31+k41)/6;
u2:=u2+(k12+2*k22+2*k32+k42)/6;
u:=u1;
wu:=(u-upr)/dt;
upr:=u;
Моделирование замкнутой автоматической системы
k11:=y2*dt;
k12:=(-(2*ksi/T)*y2-(1/(T*T))*y1+(k/(T*T))*x)*dt;
k21:=(y2+(k12/2))*dt;
k22:=(-(2*ksi/T)*(y2+k12/2)-(1/(T*T))*(y1+k11/2)+(k/(T*T))*x)*dt;
k31:=(y2+(k22/2))*dt;
k32:=(-(2*ksi/T)*(y2+k22/2)-(1/(T*T))*(y1+k21/2)+(k/(T*T))*x)*dt;
k41:=(y2+k32)*dt;
k42:=(-(2*ksi/T)*(y2+k32)-(1/(T*T))*(y1+k31)+(k/(T*T))*x)*dt;
y1:=y1+(k11+2*k21+2*k31+k41)/6;
y2:=y2+(k12+2*k22+2*k32+k42)/6;
y:=y1;
x:=g+y3*kos;
y3:=(y-ypr)/dt;
ypr:=y;
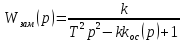
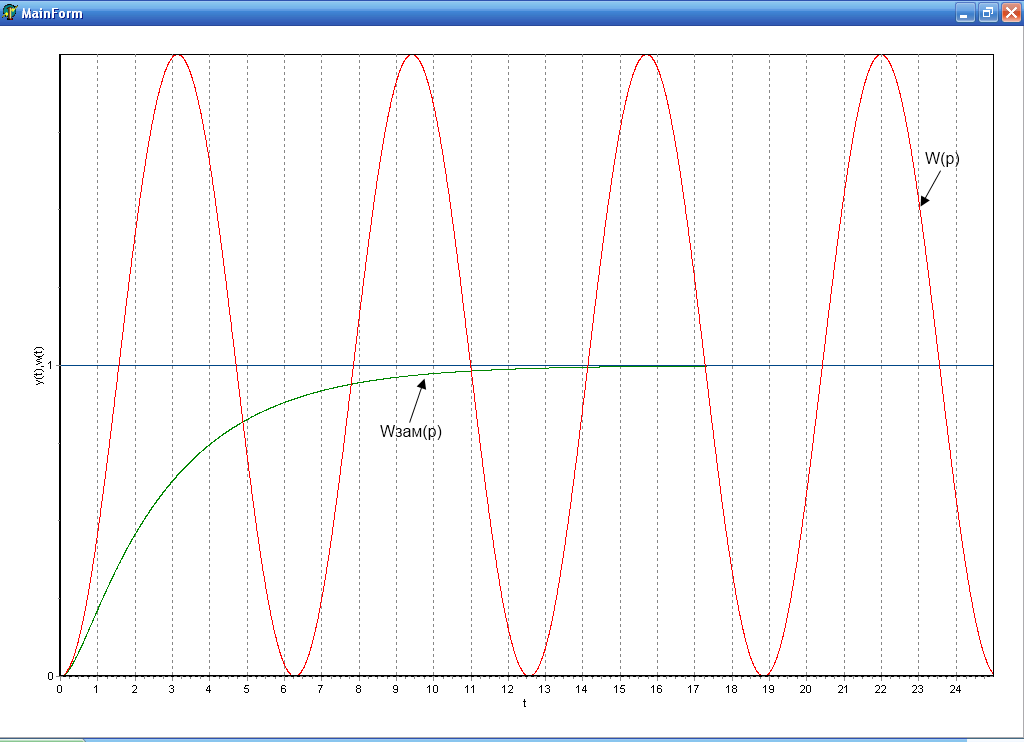
1.8. Графики полученных функций.
Отрицательная
связь

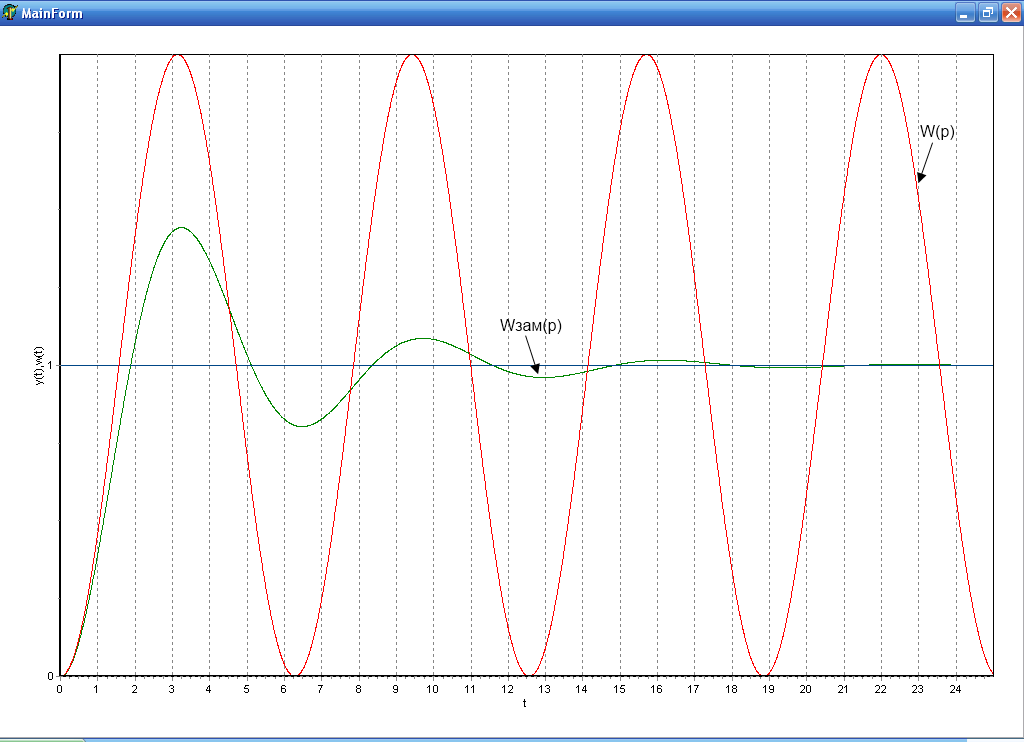
Отрицательная
связь


Отрицательная
связь

Положительная связь


Положительная
связь

Положительная связь


1.9. Доказательства изменения или характера звена или только его параметров при охвате ого обратной связью.
По полученным данным видим что при:
отрицательной
связи, когда
 ,
звено стало колебательным
,
звено стало колебательным
отрицательной
связи, когда
 ,
звено стало апериодическим первого
рода
,
звено стало апериодическим первого
рода
отрицательной
связи, когда
 ,
звено стало колебательным
,
звено стало колебательным
положительной
связи, когда
 ,
звено стало
,
звено стало
отрицательной
связи, когда
 ,
звено стало
,
звено стало
отрицательной
связи, когда
 ,
звено стало
,
звено стало
Список использованной литературы:
-
Куцый, А.С. Основы теории управления. Лабораторный практикум: лабораторные работы № 1-5 / Н.Н. Куцый. – Иркутск: ИрГУПС, 2008. – 72 с.
-
Теория систем автоматического регулирования / В. А. Бесекерский, Е. П.Попов. - Изд. 2-е , испр. и доп. - М. : Наука, 1972. - 767 с. : a-a-ил