

лабораторная работа / паркт руслана (составление функциональной схемы)
.docМинистерство общего образования Российской Федерации
Саратовский государственный технический университет
Балаковский институт техники, технологии и управления
Практическая работа.
ТАУ.
Тема: Составление функциональной схемы системы
автоматического регулирования и анализ ее работы
Выполнил студент гр. УИТ-42в
Бегжанов Р.
Проверил:
Стельмах И. В.
Балаково 2003 г.
Цель работы: научится составлять структурные схемы по принципиальной схеме, определить какой элемент САУ на какой показатель качества управления влияет и каким образом.
Дано: принципиальная схема регулирования числа оборотов электродвигателя (Рис.1). Составить структурную схему с обозначением всех элементов и с описанием всех сигналов, алгоритм работы САУ, классифицировать САУ.
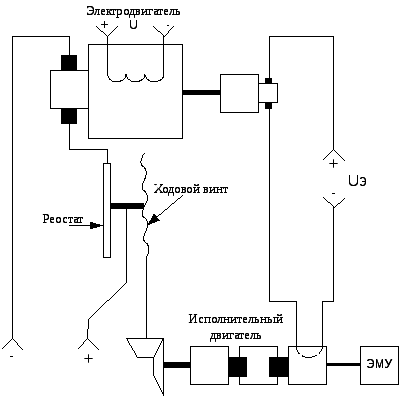
Рис.1 Принципиальная схема регулирования числа оборотов электродвигателя.
Ход работы.
1. Определим объект регулирования (ОР). Объектом регулирования в данной схеме будет являться – электродвигатель, так как основной задачей САУ, в данной схеме, является поддержание определенного числа оборотов электродвигателя. Регулируемую величину – частота вращения, обозначим «n».
2. Определим исполнительное устройство (ИУ) – реостат, так как при уменьшении сопротивления, на реостате, на якорь двигателя будет подаваться большее напряжение. Регулируемая величина – напряжение реостата Uр.
3. Определим датчик (Д) – тахогенератор, так как он преобразует выходную величину электродвигателя в выходное напряжение тахогенератора Uтг. С выхода тахогенератора сигнал попадает на компаратор (сравнивающее устройство), где сравниваются выходная величина «Uтг» с задающим напряжением «U0», а разница подается на ЭМУ U=U0-Uтг .
4. Определим усилительное устройство (УУ) – электромашинный усилитель, он служит для усиления сигнала управления. Регулируемую величину обозначим «UЭМУ» .
5. Определим преобразовательное устройство (ПУ) – исполнительный двигатель, так как он преобразует сигнал с ЭМУ в угол поворота ходового винта реостата. Регулируемую величину обозначим «w».
6. Задающим устройством (ЗУ) будет являться – напряжение U0, которое пропорционально заданно частоте вращения электродвигателя.
7. Построим структурную схему по перечисленным выше пунктам 1-6, получим:
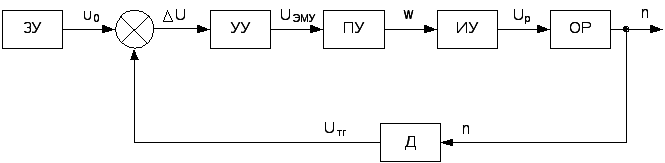
Задающее устройство (ЗУ) – напряжение U0.
Усилительное устройство (УУ) – электромашинный усилитель.
Преобразовательное устройство (ПУ) – исполнительный двигатель.
Исполнительное устройство (ИУ) – реостат.
Объект регулирования (ОР) – электродвигатель.
Датчик (Д) – тахогенератор.
Составим передаточную функцию для каждого элемента САУ в отдельности:
Wэл.д(р)= n/Uтг ; Wр(р)=Uр/w ; Wисп.д(р)= w/Uэму ; Wу(р)=Uэму/^U ;
Wд(р)=Uтг/n. U=U0- Uтг , где U – разница подаваемая на УУ (электромашинный усилитель) и с ее помощью происходит автоматическое регулирование.
Принцип работы. При увеличении нагрузки частота оборотов электродвигателя уменьшается, тахогенератор выдает меньшее напряжение Uтг , которое сравнивается на компараторе с задающим напряжением U0 и разница U подается на электромашинный усилитель. После усиления сигнал с ЭМУ подается на исполнительный двигатель, который вращает ходовой винт реостата и этим уменьшает его сопротивление. На якорь электродвигателя подается дополнительное напряжение и число оборотов электродвигателя восстанавливается.
Классифицируем САУ:
Данная САУ является одноконтурной, так как состоит из одного контура. А так же замкнутой, потому что на вход устройства управления подается как задающее воздействие, так и выходная величина, то есть имеет обратную связь.
САУ является следящей и одномерной, так как решает одну функциональную задачу, следит за одним параметром. По характеру действия является – непрерывного действия.