лабораторная работа / laboratornaya_rabota_3_korrekciya_staticheskih_i_dinamichesk
.docМинистерство общего и профессионального образования Российской Федерации
Уфимский государственный авиационный технический университет
Кафедра ТК
Лабораторная работа № 3
по дисциплине «Теория автоматического управления».
Коррекция статических и динамических свойств САУ.
Вариант 5.
Выполнил: студент гр. РС – 320
Кравчук Д.И.
Проверила:
Сильнова С.В.
Уфа
2010
Исходные данные:
|
a |
K0 |
T, c |
ξ |
εуст |
tрег, c <= |
σ, % <= |
|
2,5 |
5 |
0,7 |
0,7 |
0,1 |
3,0 |
5 |
Передаточная функция
![]() неизменяемой части системы:
неизменяемой части системы:
![]()
Раздел 1. Коррекция статических свойств САУ
1. Путем моделирования на РС исходной САУ (рис. 3.6) получить
г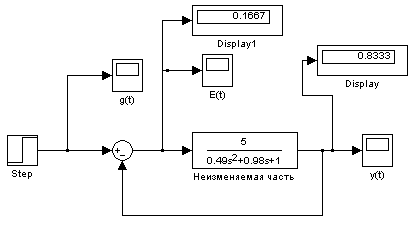 рафики
рафики
![]()
-
Задающее воздействие g(t)=1(t)


Время регулирования tрег = 3 секундам с точностью 5%.
Перерегулирование
![]()
-
З
 адающее
воздействие
адающее
воздействие



-
Cравнить полученную таким образом экспериментальную величину
 с теоретической, вычисленной по формуле
с теоретической, вычисленной по формуле
![]()
![]()
где
![]() -
передаточная функция САУ по ошибке
управления, равная
-
передаточная функция САУ по ошибке
управления, равная
![]() (3.3)
(3.3)
![]() - передаточная функция разомкнутой САУ.
- передаточная функция разомкнутой САУ.
![]()
-
g(t)=1(t)
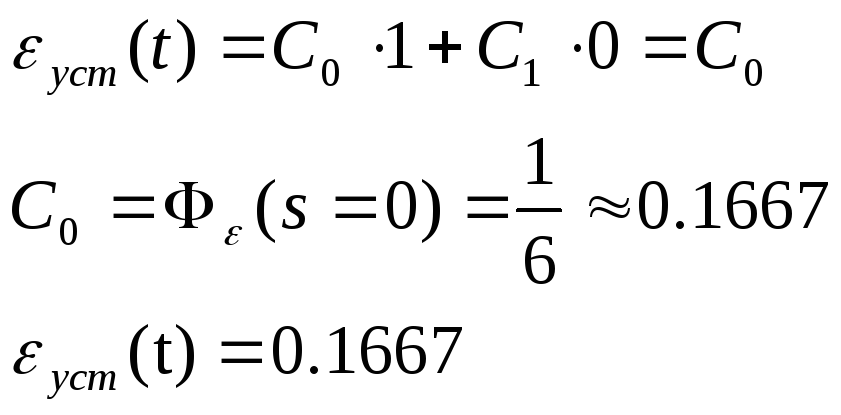
Экспериментальная величина установившейся ошибки совпадает с теоретической.
-
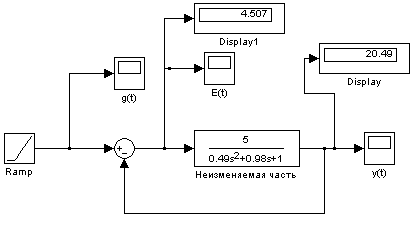
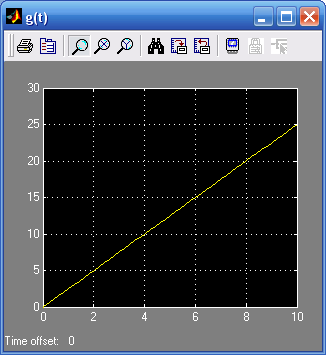
g(t)=at
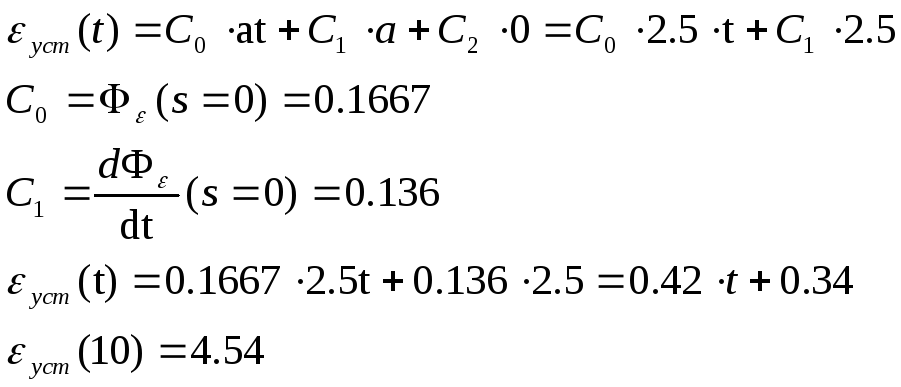
Формула для установившейся ошибки, полученная теоретически, представляет собой уравнение прямой, что согласуется с графиком, полученном при моделировании, при t > 3c.
3. Применяя описанные в теоретической
части методических указаний способы
коррекции статических свойств (см.
п.2.1), обеспечить требуемую статическую
ошибку
![]() системы при отработке
задающего воздействия
системы при отработке
задающего воздействия
![]()
3.1. Увеличение коэффициента усиления прямого тракта системы:

В процессе моделирования было определено, что с увеличением K статическая ошибка в системе уменьшается и, наоборот, с уменьшением K статическая ошибка в системе увеличивается. Путем подбора был установлен коэффициент усиления K = 1.8 , при котором установившаяся ошибка εуст=0,1.
tрег = 2.4 секунд с точностью 5%.
Перерегулирование
![]()
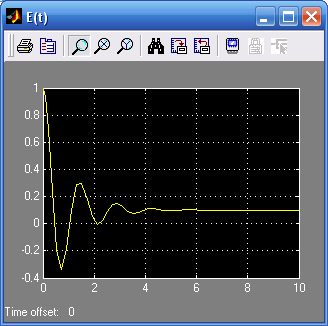
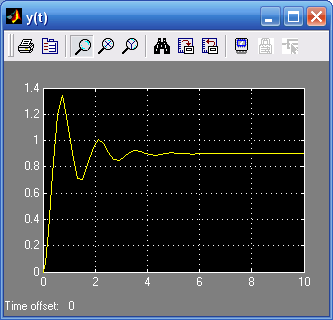
3.2. Введение в прямой тракт системы интегрирующих звеньев
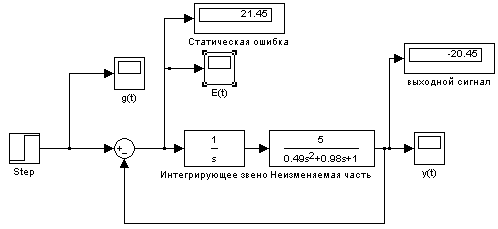
Система является астатической (с астатизмом первого порядка).
![]()
![]()
Система имеет нулевую статическую ошибку при отработке постоянного задающего воздействия g(t)=1(t).
Путем подбора не удалось найти такой интегратор, при котором установившаяся ошибка εуст=0,1.
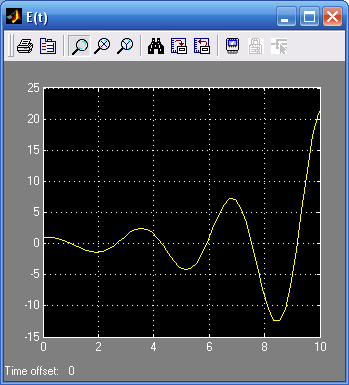
Введение интегрирующего звена в прямой тракт системы, не позволяет обеспечить заданную величину установившейся ошибки εуст=0,1.
3.3. Охват объекта управления местной неединичной положительной обратной связью.
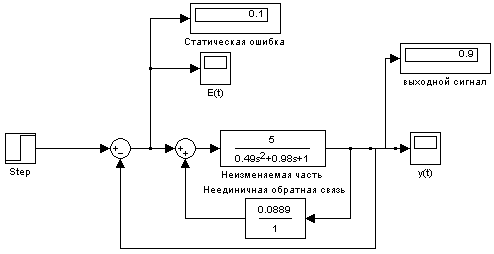
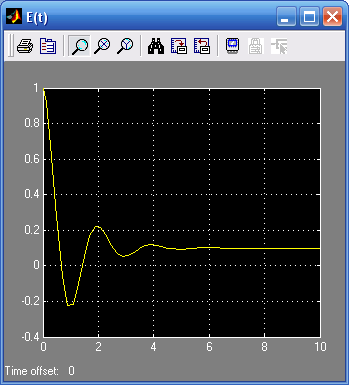
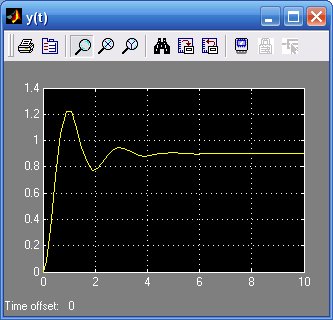
tрег = 2,35 секундам с точностью 5%.
Перерегулирование
![]()
4. Сравнить время регулирования
![]() и перерегулирование
и перерегулирование
![]() в исходной и скорректированной системах
при
в исходной и скорректированной системах
при
![]()
При увеличении коэффициента усиления прямого тракта системы время регулирования уменьшается, а перерегулирование увеличивается. При введении неединичной положительной обратной связи время регулирования и перерегулирование уменьшается.
Раздел 2. Коррекция динамических свойств САУ
-
С
 троим
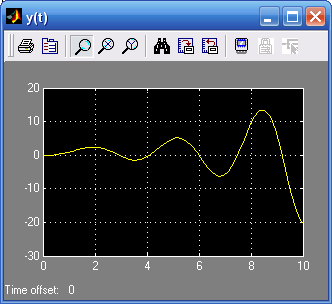
исходную схему и получаем графики y(t)
и ε(t),
а также логарифмические характеристики.
троим
исходную схему и получаем графики y(t)
и ε(t),
а также логарифмические характеристики.

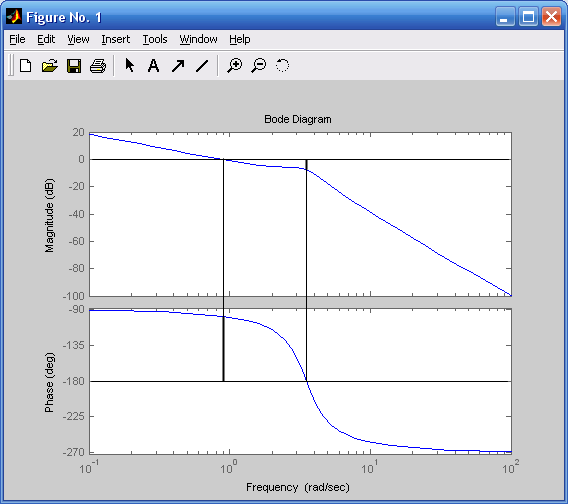
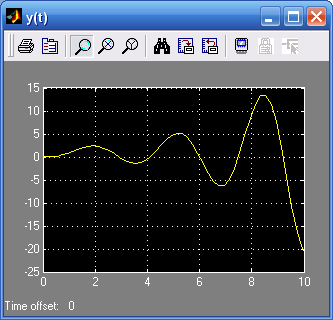
ЛАХ и ЛЧХ:
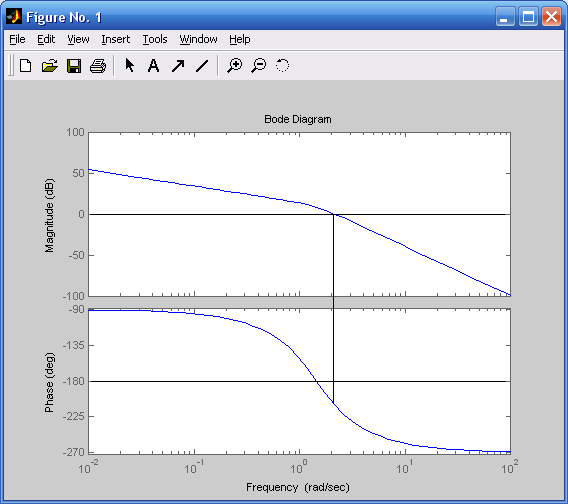
Система не устойчива.
-
В исходную систему вводим регулятор и охватываем передаточную ОУ местной отрицательной обратной связью:



Время регулирования tрег = 2,98 с.
Перерегулирование
![]() .
.
ЛАХ и ЛЧХ: