

лабораторная работа / laboratornaya_rabota_1 (2)
.docМинистерство образования и науки Украины
Национальный Технический Университет
"Харьковский Политехнический Институт"
Кафедра «Системный анализ и управление»
ОТЧЕТ
по лабораторной работе № 1
на тему:
«Исследование систем управления по отклонению»
Выполнили:
ст. гр. ИФ-55Б
Губенко С.А.
Калюх С.Н.
Сорокоумова М.А.
Проверил:
Дорофеев Ю.И.
Харьков - 2009
ВЫПОЛНЕНИЕ ЗАДАНИЯ:
1. Объект управления задан двумя передаточными функциями:
![]() ,
,
![]() ,
,
где u(t) – управляющее воздействие, f(t) – возмущающее воздействие.
Необходимо выбрать значения параметров передаточных функций, описывающих объект управления:
betta1 = 3, gamma1 = 2, Ku = 5, Kf = 7, alfa1 = 2, alfa2 = 1.
2. Решим задачу стабилизации, то есть
найдем значения коэффициентов
ПИ-регулятора
![]() ,
обеспечивающие заданное расположение
полюсов замкнутой системы.
,
обеспечивающие заданное расположение
полюсов замкнутой системы.
Передаточная функция системы имеет вид:
![]() .
.
Воспользуемся критерием Рауса-Гурвица,
и найдем значения коэффициентов
ПИ-регулятора
![]() ,
обеспечивающие устойчивость заданной
системы:
,
обеспечивающие устойчивость заданной
системы:
 .
.
Характеристический полином полученной ПФ имеет вид:
![]() .
.
Воспользуемся критерием Рауса-Гурвица:
 ,
,
 ,
,
Согласно критерию Рауса-Гурвица для
полинома второй степени достаточно
![]() .
Наши
.
Наши
![]() удовлетворяют этому условию и обеспечивают
устойчивость заданной системы.
удовлетворяют этому условию и обеспечивают
устойчивость заданной системы.
3. Реализовать модель исследуемой системы в среде SIMULINK в соответствии со структурной схемой:

![]() ,
,
![]() ,
,
![]() (ПИ-регулятор).
(ПИ-регулятор).
Наша модель, построенная в SIMULINK:

4. Исследовать изменение ошибки системы
![]() при различных типах задающего воздействия
в условиях отсутствия возмущающего
воздействия:
при различных типах задающего воздействия
в условиях отсутствия возмущающего
воздействия:
1)
![]() ,
,
![]() =1сек (
=1сек (![]() )
)

Выводы: после того, как на 1-й секунде было подано задающее воздействие в виде единичного скачка, ПИ-регулятор позволил стабилизировать систему и вернуть её к первоначальному состоянию, то есть минимизировать ошибку на выходе.
2)
![]() , (
, (![]() )
)
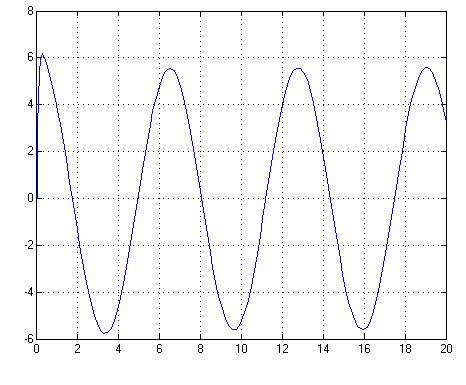
Выводы: на рисунке видно, что при задающем воздействии в виде синусоиды ПИ-регулятор стремится стабилизировать амплитуду ошибки на выходе системы.
5. Исследовать изменение ошибки системы
![]() при возникновении возмущающего
воздействия:
при возникновении возмущающего
воздействия:
1)
![]() ,
,
![]() сек,
сек, ![]() сек;
сек;

Выводы: при подаче на 10-й секунде возмущающего воздействия ПИ-регулятор позволил свести ошибку регулирования к нулю.
2)
![]() ,
, ![]() .
.

Выводы: как видно из графика, ПИ-регулятор не может погасить возмущение, возникающее при внешнем воздействии.