

2.10.2 Формирование магистралей адреса, данных и управления
микроЭВМ.
Схемы формирования магистралей адреса, данных и управления различны при включении МП К1810ВМ86 в минимальном или максимальном режиме.
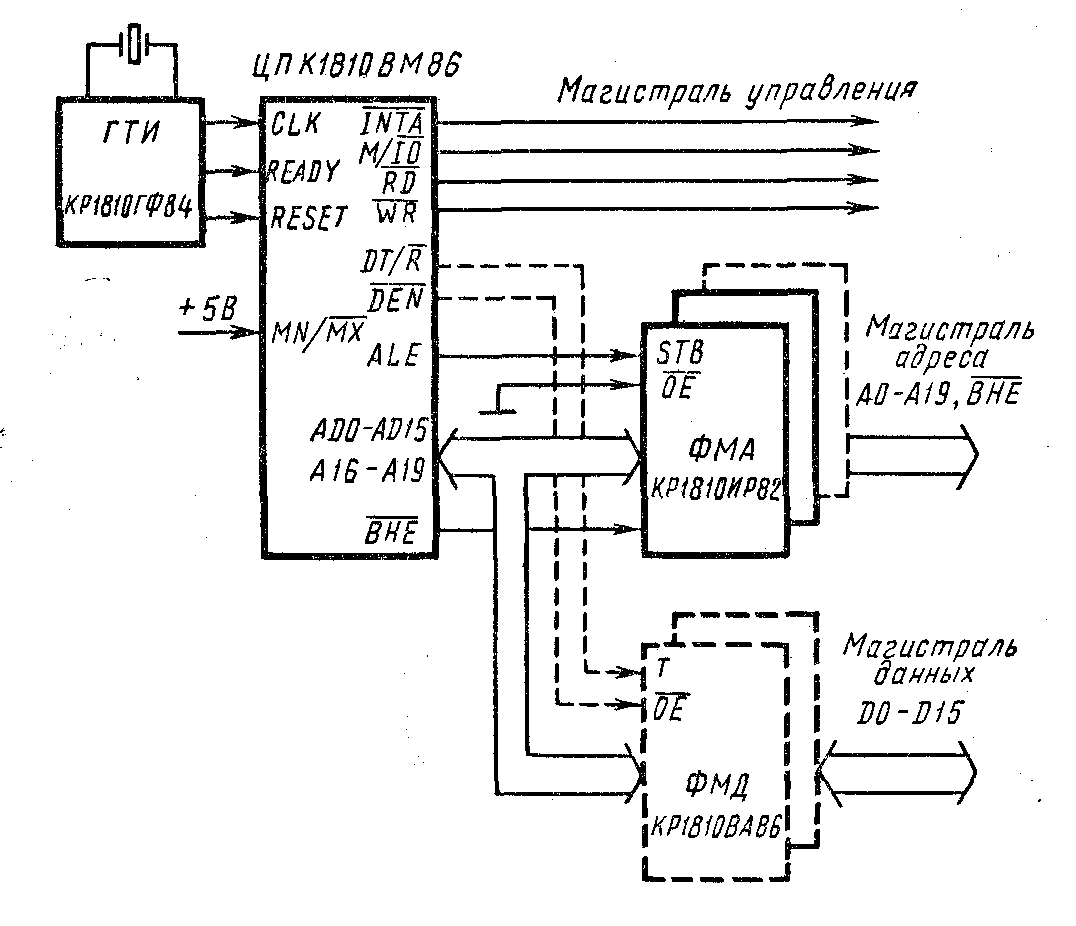
Рисунок 18 - Формирование магистралей адреса и данных при работе
БИС ЦП К1810ВМ86 в минимальном режиме
В минимальном режиме
магистраль управления образуется
сигналами:
![]() — обращение к памяти или к УВВ,
— обращение к памяти или к УВВ,
![]() - строб чтения данных,
- строб чтения данных,
![]() — строб записи данных,
— строб записи данных,
![]() — строб чтения вектора прерываний, а
для управления регистрами магистрали
адреса и формирователями магистрали
данных используются сигналы приема-передачи
—
— строб чтения вектора прерываний, а
для управления регистрами магистрали
адреса и формирователями магистрали
данных используются сигналы приема-передачи
—
![]() и разрешения обмена данными —
и разрешения обмена данными —
![]() (рисунок 18).
(рисунок 18).
В максимальном режиме для формирования управляющих сигналов применяют системный контроллер КР1810ВГ88, обрабатывающий сигналы SO, SI, S2 состояния МП.
МП К1810ВМ86 можно подключать к общей многопроцессорной магистрали ИЧ1 (MULTIBUS); при этом для арбитража доступа МП БИС к магистрали необходимо использовать арбитр магистрали БИС К1810ВБ89 (рисунок 19).
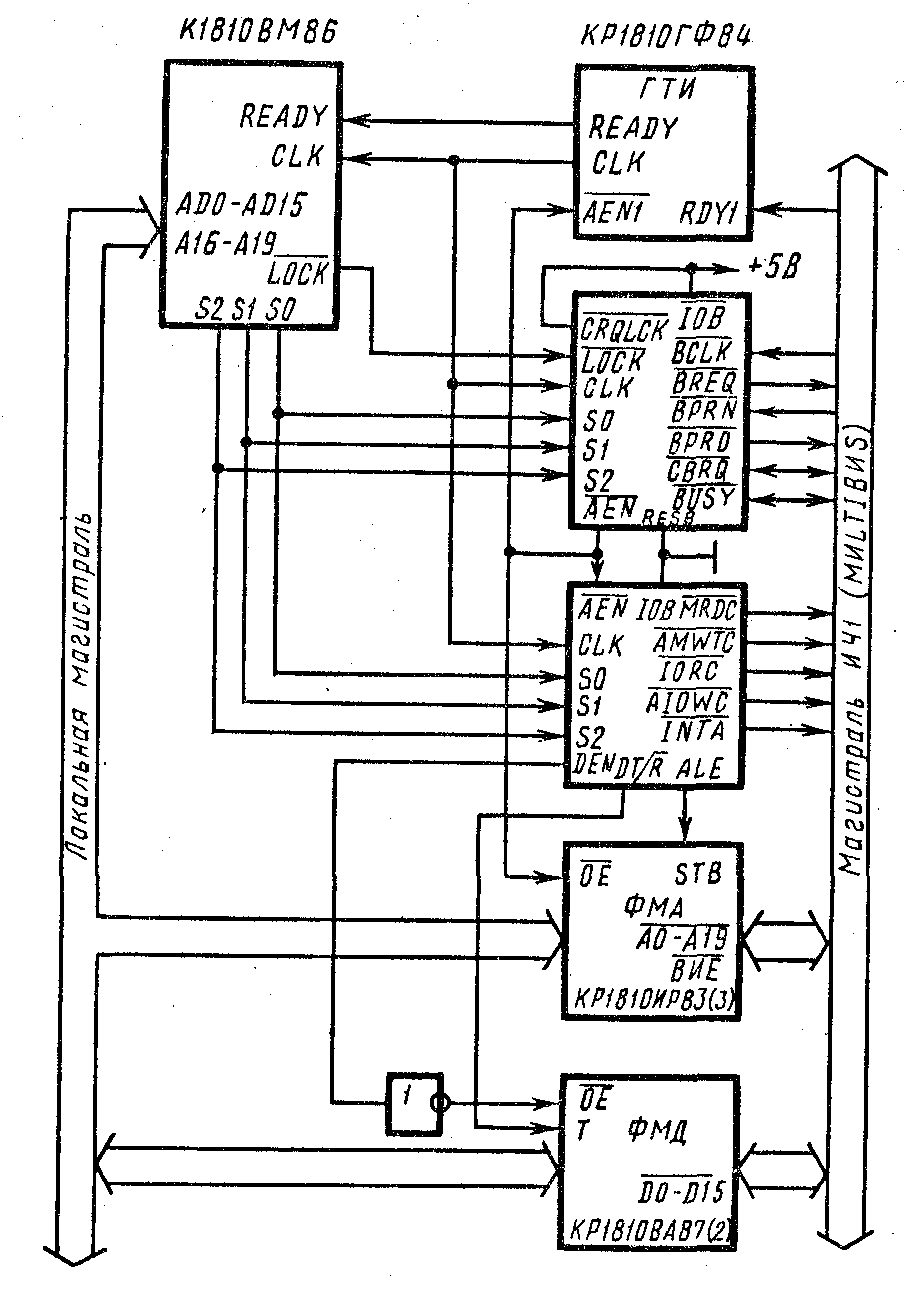
Рисунок 19 - Подключение МП БИС К1810ВМ86 в максимальном
режиме к мультиплексорной магистрали ИЧ1 (MULTIBUS)
При необходимости захвата
магистрали процессором арбитр вырабатывает
сигналы запроса захвата магистрали
![]() и всеобщего запроса
и всеобщего запроса
![]() .
Если магистраль свободна (
.
Если магистраль свободна (![]() равно 1) и есть разрешение
равно 1) и есть разрешение
![]() с внешнего арбитра распределения
приоритетов (при параллельной обработке
приоритетов), то формируется сигнал
захвата магистрали
с внешнего арбитра распределения
приоритетов (при параллельной обработке
приоритетов), то формируется сигнал
захвата магистрали
![]() и по сигналу
и по сигналу
![]() информация с внутренней магистрали
адреса выдается на магистраль ИЧ1.
Этот же сигнал разрешает системному
контроллеру К1810ВГ88 выдать на магистраль
сигналы управления
информация с внутренней магистрали
адреса выдается на магистраль ИЧ1.
Этот же сигнал разрешает системному
контроллеру К1810ВГ88 выдать на магистраль
сигналы управления
![]() ,
MWTC,
,
MWTC,
![]() ,
IOWC.
,
IOWC.
Сигнал
![]() используется в схемах с последовательным
заданием приоритетов для трансляции
сигнала разрешения доступа
используется в схемах с последовательным
заданием приоритетов для трансляции
сигнала разрешения доступа
![]() (в том случае, когда процессор не требует
доступа к магистрали) арбитру с более
низким приоритетом (приоритет задается
последовательностью соединения арбитров)
на его вход
(в том случае, когда процессор не требует
доступа к магистрали) арбитру с более
низким приоритетом (приоритет задается
последовательностью соединения арбитров)
на его вход
![]() для дальнейшей обработки.
для дальнейшей обработки.
Для монопольного захвата
магистрали на время выполнения одной
команды (с префиксом
![]() )
процессор может вырабатывать сигнал
)
процессор может вырабатывать сигнал
![]() .
.
3 Разработка систем памяти
3.1 БИС ОЗУ К565РУ6
ОЗУ динамического типа серии К565. Микросхемы серии К565 представляют собой оперативные запоминающие устройства с произвольной выборкой динамического типа, изготавливаются по n-канальной МОП-технологии с кремниевыми затворами и двумя типами транзисторов (с индуцированным и встроенным каналом) и предназначены для построения накопителей ОЗУ большой емкости.
В состав серии входят: К565РУ5 (Б, В, Г, Д) емкостью 65 536 бит с организацией 65536x1 бит; К565РУ5 (Д1, Д2) емкостью 32 763 бит с организацией 32 768 х I бит; К565РУ5 (ДЗ, Д4) емкостью 16 384 бит с организацией 16 384 х 1 бит; КР565РУ6 (Б, В, Г, Д) емкостью 16 384 бит с организацией 16384 х 1 бит. Внешние сигналы: RAS — сигнал выбора адреса строк, С AS — сигнал выбора адреса столбцов, WE — сигнал записи/считывания, а также сигналы, вырабатываемые схемой управления, обеспечивают работу ОЗУ в режимах считывания, записи, постраничного считывания или постраничной записи, считывания-модификации-записи, регенерации по сигналу RAS.
Временные диаграммы работы микросхем в режимах считывания, записи. считывание — модификация — запись, регенерации приведены на рисунке 5 г - ж. Это позволяет при работе в страничном режиме получить значительный выигрыш в быстродействии. Внутри страничного режима возможна любая комбинация режимов записи, считывания и считывание — модификация — запись.
Регенерация информации в динамических ячейках памяти осуществляется за 128 циклов путем обращения к каждой из 128 строк не ранее, чем через каждые 2 мс перебором адресов /1(0 — 6). Регенерация может быть осуществлена в любом из режимов ОЗУ, однако наиболее просто ее выполнить в режиме регенерации по сигналу RAS. когда сигнал CAS находится в неактивном высоком логическом состоянии (регенерация сигналом RAS). При регенерации в этом режиме имеет место минимальная потребляемая мощность. При эксплуатации микросхем необходимо помнить, что после подачи напряжения питания БИС ОЗУ переходит в нормальный режим функционирования через 2,0 мс и требует проведения затем 16 рабочих циклов регенерации.
Основные электрические и временные параметры БИС ОЗУ К565РУ5, КР565РУ6 при температуре 25±100С приведены в таблице 4.
Таблице 4 – Основные электрические и временные параметры БИС ОЗУ
К565РУ5, КР565РУ6

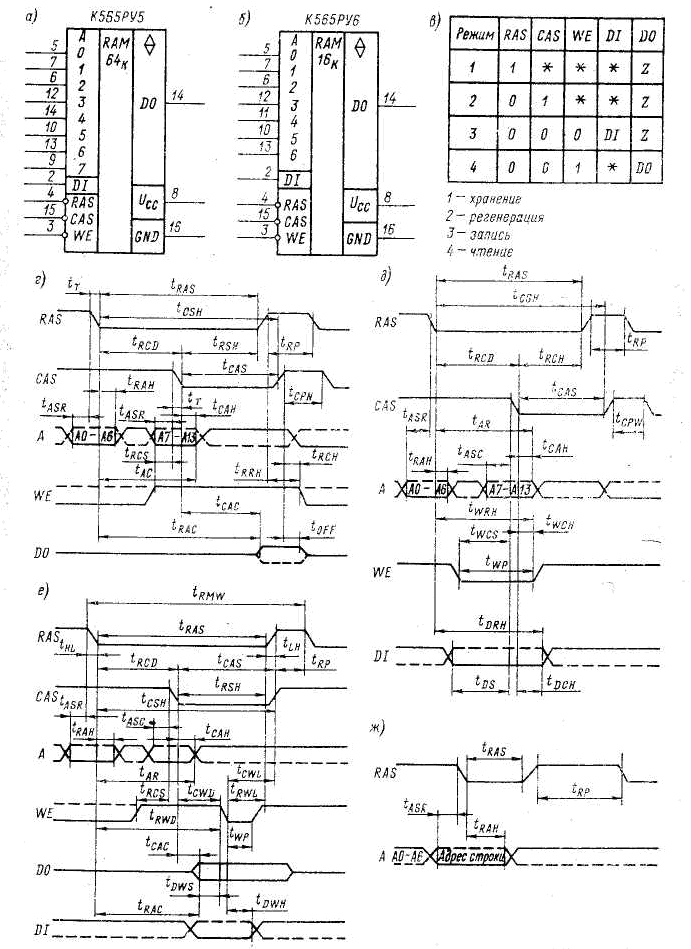
Рисунок 5 – Временные диаграммы работы микросхем и их условные
графические изображения

Рисунок 6 – Структура микросхемы динамического ОЗУ
-
БИС ПЗУ К541РТ2
К541РТ2 - программируемые ПЗУ, изготовлены по ТТЛШ-технологии. Функциональный состав серии включает микросхемы емкостью до 64К бит со словарной 4- и 8-разрядной организацией с временем выборки 45 ... 85 нс и уровнем потребляемой мощности от 0,6 до 1 Вт.
Основные характеристики:
Потребляемая мощность Рпотр, мВт 770
Емкость, бит 2Кх8
Время
цикла записи/чтения
![]() ,
нс 100
,
нс 100
Исходное состояние 0
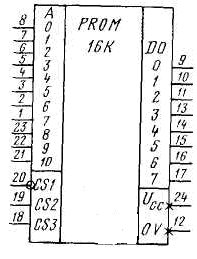
Рисунок 20 - Цоколевка корпуса ПЗУ К541РТ2
CS1, CS2, CS3 – управляющие сигналы
А0-А10 – входы адреса
DO – выходные данные
0V – общий вывод микросхемы
Ucc – напряжение питания
На рисунке 21 представлена структура ПЗУ К541РТ2.
Матрица до программирования, т. е. в исходном состоянии, содержит однородный массив проводящих перемычек, соединяющих строки и столбцы во всех точках их пересечений. Перемычки устанавливают из нихрома. Перемычка в матрице выполняет роль ЭП. Наличие перемычки кодируют логической 1, если усилитель считывания является повторителем, и логическим 0, если усилитель считывания — инвертор. Микросхема ППЗУ в исходном состоянии перед программированием в зависимости от характеристики выходного усилителя может иметь заполнение матрицы либо логическим 0, либо логической 1.
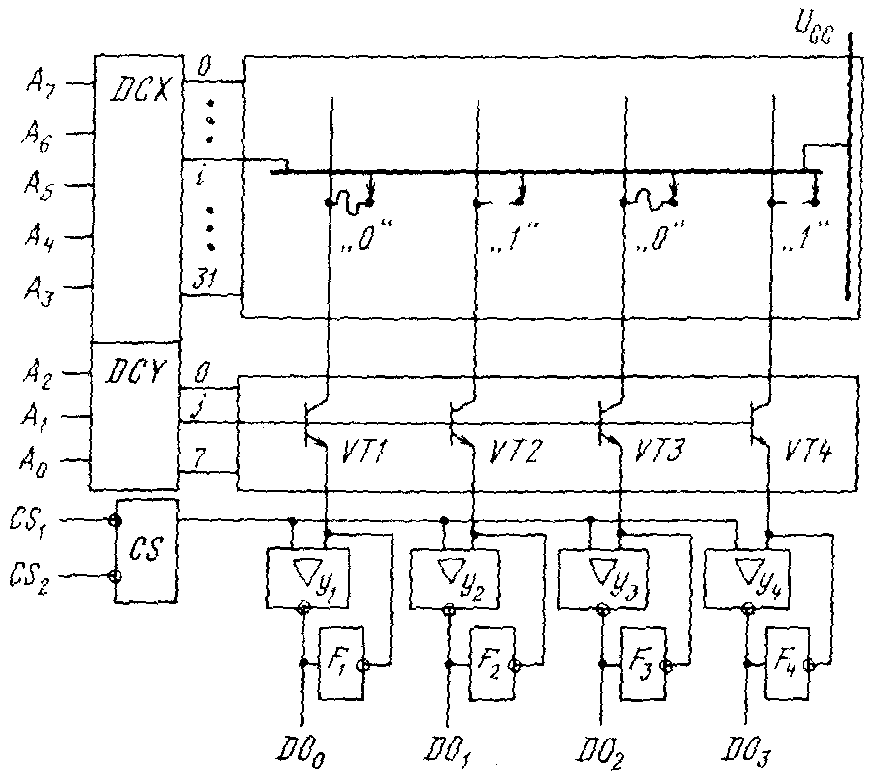
Рисунок 21 - Структура ПЗУ К541РТ2
Программирование микросхемы, матрица которой в исходном состоянии заполнена 0, заключается в пережигании перемычек в тех ЭП, где должны храниться 1. Если матрица в исходном ее стоянии заполнена 1, то пережигают перемычки в ЭП, где должны храниться 0.
Работа запрограммированной микросхемы ПЗУ К556РТ6 в режим считывания осуществляется следующим образом: на выходы селекторов включены усилители считывания, стробируемые сигналами СS1 и СS2. При СS1=СS2=0 усилители открыты для считывания информации, при других комбинациях этих сигналов — закрыты и на их выходах устанавливаются уровни 1.
Выборку 4-разрядного слова осуществляют 8-разрядным кодом адреса, поступающим на адресный формирователь F, который необходим для согласования схем на кристалле с внешними цепями, и затем на входы дешифраторов строк А7—А3 и столбцов А2—А0. На одном из выходов каждого дешифратора формируются высокие уровни напряжения, которые выбирают из матрицы 4-разрядное слово. На выход микросхемы выбранное слово поступает при разрешающих сигналах управления считыванием СS1 = СS2=0.
Подключение ПЗУ к шинам данных и адреса производится также посредством буферного регистра и шинного формирователя. Разница в том, что постоянное запоминающее устройство не нуждается в управляющем сигнале от МП на разрешение записи/считывания W/R, и, соответственно, не имеет данного входа.
4 РАЗРАБОТКА ПОДСИСТЕМ ВВОДА/ВЫВОДА, ПРЕРЫВАНИЙ, ПДП
4.1 Программируемый параллельный интерфейс подсистемы ввода/
вывода КР580ВВ55
Ммкропроцессорная БИС программируемого параллельного интерфейса КР58ОВВ55 предназначена для организации ввода/вывода параллельной информации различного формата и позволяет реализовать большинство известных протоколов обмена по параллельным каналам. БИС программируемого параллельного интерфейса (ППИ) может использоваться для сопряжения микропроцессора со стандартным периферийным оборудованием (дисплеем, телетайпом, накопителем).
Структурная схема ППИ приведена на рисунке 9.
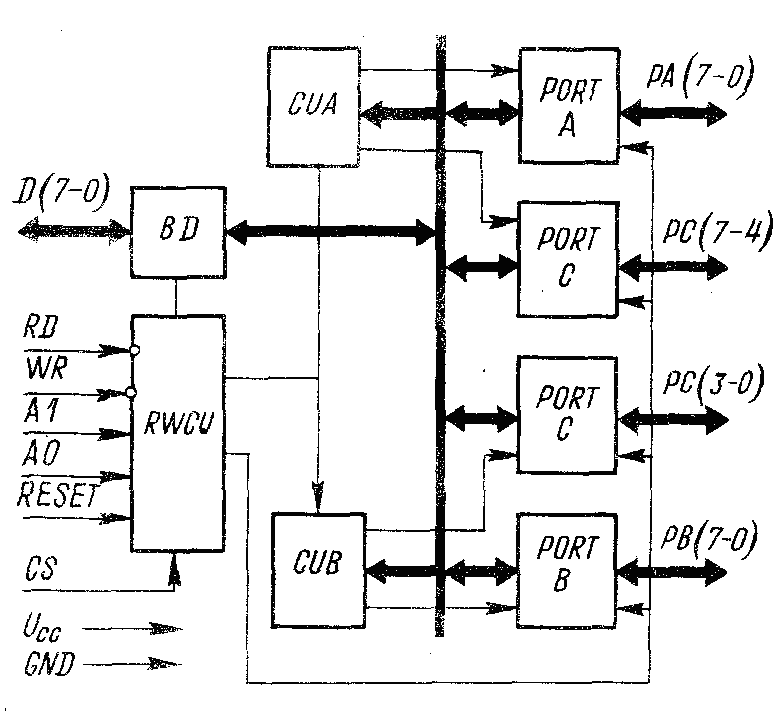
Рисунок 9 — Структурная схема программируемого параллельного интер-
фейса КР580ВВ55
В состав БИС входят: двунаправленный 8-разрядный буфер данных (ВD), связывающий ППИ с системной шиной данных; блок управления записью/чтением (RWCU), обеспечивающий управление внешними и внутренними передачами данных, управляющих слов и информации о состоянии ППИ; три 8-разрядных канала ввода/вывода (РОRТ А, В и С) для обмена информацией с внешними устройствами; схема управления группой А (СUA), вырабатывающая сигналы управления каналом А и старшими разрядами канала С[РС(7-4)]; схема управления группой В (СUВ), вырабатывающая сигналы управления каналом В и младшими разрядами канала С[РС(3-0)].
Таблица 9 — Описание выводов программируемого параллельного интер-
фейса КР580ВВ55.
|
Обозначение вывода |
Номер контакта |
Назначение вывода |
|
1 |
2 |
3 |
|
D(7-0) |
27; 28; 29; 30; 31; 32; 33; 34 |
Вход/выход данных |
|
RD |
5 |
Чтение; L-уровень сигнала разрешает считывание информации из регистра, адресуемого по входам А0, А1 на шину D(7-0) |
|
WR |
36 |
Запись; L-уровень сигнала разрешает запись информации с шипы D(7—0) в регистр ППИ, адресуемый по входам А0, А1 |
|
АО, А1 |
9; 8 |
Входы для адресации внутренних регистров ППИ |
|
RESET |
35 |
Сброс; H-уровень сигнала обнуляет регистр управляющего слова и уста-навливает все порты в режим ввода |
|
CS |
6 |
Выбор микросхемы; L-уровень сигнала подключает ППИ к системной шине |
|
РА(7-0) |
37; 38; 39; 40; 1; 2; 3; 4 |
Вход/выход канала А |
|
РВ(7-0) |
15; 24; 23; 22; 21; 20;19; 18 |
Вход/выход канала В |
|
РС(7-0) |
10; 11; 12; 13; 17; 16; 15; 14 |
Вход/выход канала С |
|
Ucc |
26 |
Напряжение питания ( + 5 В) |
|
GND |
7 |
Напряжение питания (0 В) |
Назначения входных, выходных и управляющих сигналов ППИ приведены при описании выводов микросхемы в таблице 9. Сопряжение БИС КР580ВВ55 со стандартной системной шиной показано на рисунке 10. Сигналы управления работой ППИ подаются на блок К\УС11 и вместе с адресными входами АО, А1 задают вид операции, выполняемой БИС.
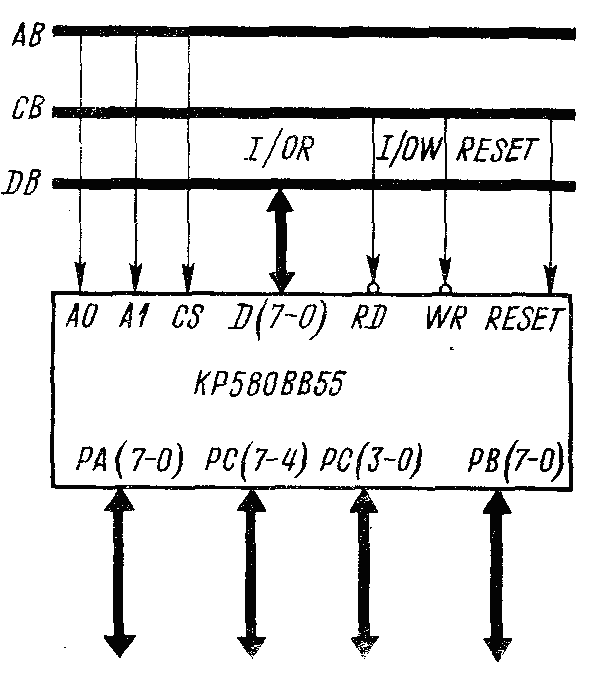
Рисунок 10 — Схема сопряжения программируемого параллельного ин-
терфейса КР580ВВ55 со стандартной системной шиной
Основные электрические параметры микросхемы КР580ВВ55 следующие:
Выходное напряжение логического нуля UOL, В 0,4.
Выходное напряжение логической единицы UOH, В 2,4.
Ток потребления от источника питания ICC, мА 60.
Ток утечки каналов А, В, С, D
при невыбранном режиме IIOZ, мкА 100,...,100;
Ток утечки на управляющих входах IIL, мкА —10,...,10.
4.2 Подсистема прерываний
Микропроцессорная БИС имеет простую и изменяющуюся систему прерываний. Прерывания могут быть вызваны внешними устройствами, выполнением соответствующих команд, а также инициированы самой МП БИС (внутренние прерывания). Существует 256 различных типов прерываний.
Для подачи прерываний в МП БИС имеются два входа:
INTR – Interrupt Reguest и NMI – Non Masking Interrupt (рисунок 24).
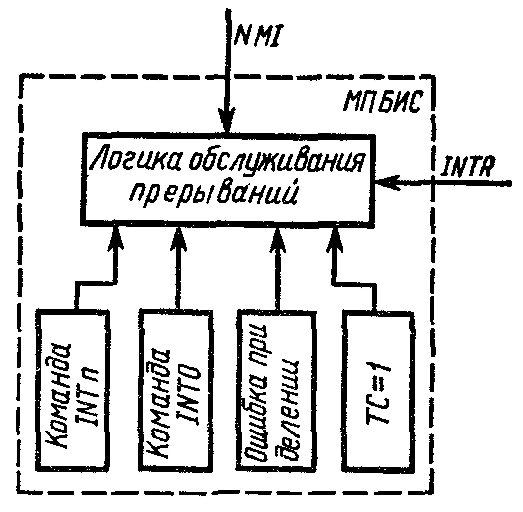
Рисунок 11 – Возможные способы формирования прерываний в МП
К1810ВМ6
Вход INT обычно используется для подключения программируемого блока приоритетных прерываний (БПП). По функциональному назначению микросхема БПП аналогична схеме КР580ИК59 и является дальнейшей ее модификацией. Режимы работы БПП могут быть заданы программно. Основные задачи БПП – получение запросов прерывания от различных внешних устройств, определение сигнала с высшим приоритетом, формирование запроса прерывания на входе МП БИС и сообщение номера текущего обслуживаемого внешнего устройства. Прерывания по входу INT могут быть маскированы путем записи «0» или «1» в разряд 1 флагового регистра МП БИС.
Микропроцессорная БИС реагирует на поступление запроса прерывания по входу INTR последовательным выполнением двух машинных циклов обслуживания прерывания: первый указывает БПП, что запрос прерывания был воспринят, и начинает обслуживаться; на втором БПП выдает на МД байт данных, указывающий тип прерывания (0–255). При работе МП БИС с максимальной конфигурацией системы на интервале двух циклов INTA на выходе LOCK формируется сигнал, запрещающий другим процессорам системы пользоваться магистралями.
Внешние устройства могут подавать запросы прерывания на второй вход NMI МП БИС. На этом входе запрос воспринимается и записывается в МП БИС по фронту поступающего импульса, не может быть маскирован и имеет высший приоритет по отношению к запросам, поступающим на вход INTR. Обычно вход NMI используют для указания МП БИС о каких-либо сбоях в системе (сбоях в источнике питания, ошибках в памяти). При определении наличия сигнала на входе NMl МП БИС нет необходимости получать код для инициализации процесса обслуживания прерывания и соответственно она не формирует два машинных цикла INTA в ответ на запрос по входу NMI.
Внутренние прерывания формируются за счет выполнения МП БИС команды прерывания (тип команды зависит от источника прерывания).
При установке флага переполнения О=1 в результате выполнения какой-либо команды программы формируется команда прерывания – INTO (прерывание по переполнению).
Микропроцессорная БИС формирует прерывание сразу же после выполнения команд DIV или IDIV, если частное от деления больше, чем разрядность используемых регистров.
При установке флага Т=1 МП БИС автоматически формирует прерывание, которое воздействует сразу после выполнения любой текущей команды. Этот тип прерывания называют одношаговым или первым типом, и он является мощным средством при отладке программ. При выполнении одношагового типа прерывания МП БИС производит обычную последовательность операций, а именно записывает в стек флаги МП БИС, содержимое регистров CS и IP. В дополнение к этому очищаются флаги I и Т. В регистры CS и IP записываются соответственно из адресов 00006, 00007 и 00004, 00005 новые значения базового адреса сегмента и смещения для передачи управления на соответствующую подпрограмму обслуживания прерывания. В качестве такой подпрограммы может быть использована подпрограмма выдачи результата выполнения программы на печать, дисплей и т. д. По окончании выполнения подпрограммы после получения команды IRET (возврат из подпрограммы) из стека извлекаются и записываются в МП БИС флаги и содержимое регистров IP и СР. Из приведенных пояснений ясно, что при выполнении одношагового типа прерывания МП БИС обслуживает прерывания обычным способом. Однако обеспечение вывода результатов выполнения отдельных блоков в программе или даже отдельных команд с целью их последующего анализа путем задания в нужном месте программ режима одношаговых прерываний является удобным средством при исследовании работы программ.
Типы внутренних прерываний имеют ряд общих свойств:
1) код прерывания сообщается МП БИС перед командой или включен в команду прерывания;
2) на выходе МП БИС не формируются сигналы INTA;
3) за исключением одношагового типа, внутренние прерывания не могут быть программно отключены;
4) за исключением одношагового типа, любой из внутренних прерываний имеет более высокий приоритет по отношению к внешним прерываниям.
Любой из 256 возможных типов прерывания характеризуется вектором прерывания. Векторы прерывания занимают 1К байт адресного пространства. На рисунке 25 показано распределение начал векторов прерывания по адресам памяти. Как видно из рисунка, каждый вектор занимает четыре ячейки памяти, при этом два младших адреса в векторе используются для записи смещения в сегменте, а два старших — для записи базового адреса сегмента.

Рисунок 12 – Распределение векторов прерываний в памяти микроЭВМ
Формирование адреса передачи управления на соответствующую подпрограмму обслуживания прерывания в BIU происходит так же, как и при обращении к любой ячейке памяти, а именно: содержимое двух младших адресов вектора прерывания записывается в регистр IP, coдержимое старших двух адресов записывается в регистр CS. После этого содержимое CS смещается на четыре разряда влево и откладывается с содержимым IP. Полученное 20-разрядное число определяет адрес начала подпрограммы прерывания.
В данной микропроцессорной системе используется контроллер прерываний К1810ВН59А. Структурная схема изображена на рисунке 26.

Рисунок 13 – Структурная схема контроллера прерываний К1810ВН59А
Включение контроллера прерываний в систему показано на рисунке 27.

Рисунок 14 – Включение контроллера прерываний в МПС
Контроллер принимает запросы от внешних устройств, определяет, какой из незамаскированных запросов имеет наивысший приоритет, сравнивает его с приоритетом текущей программы и при соответствующих условиях выдает запрос прерывания INT для МП. После подтверждения запроса МП должен получить от котроллера информацию, которая укажет на подпрограмму, соответствующую данному ВУ.