

27. Режим захват шин МП 8080
Этот режим используется для организации выполнения операций ПДП. Для этого МП имеет вход HOLD (ЗПДП) и соответствующий ему выход HLDA (ППДП).
Внешнее устройство запрашивает режим ПДП сигналом H-уровня на линии HOLD. При этом проц останавливает выполнение операции и отсоединяется от внешних ША и ШД. Линии шин переходят в высокоимпедансное состояние.
Проц подтверждает принятие запроса ПДП установкой сигнала H-уровня (т.е. 1) на выходе HLDA. Пока действует сигнал на входе HOLD, шины проца находятся в распоряжении внешнего устройства, которое послало прямой запрос к памяти (запрос ПДП).
Сигналы управления обменом информацией между внешним устройством и памятью формируется специальный БИС – контроллером ПДП.
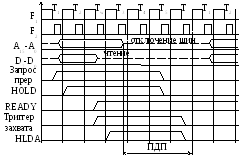
Сигнал HOLD воспринимается процом в такте Т2, если на входе READY присутствует 1, то на входе внутреннего триггера захвата также устанавливается H-уровень, благодаря чему по фронту следующего за этим импульса F1 сигнал HLDA переключается в 1. При выполнении циклов чтения или ввода проц подтверждает захват в начале такта Т3 по окончании чтения. В циклах записи и вывода это осуществляется в такте, следующим за Т3 по окончании записи.
В обоих случаях шины проца переводятся в высокоимпедансное состояние по фронту импульса F2, следующего за импульсом F1, за которым выполнялось переключение выходов HLDA (утверждение захвата). Проц выходит из режима захвата следующим образом: по окончании сигнала захвата (HOLD) импульсом F2 сбрасывается триггер захвата, благодаря чему по переднему фронту импульса F1 на выходе подтверждения захвата HLDA формируется сигнал низкого уровня (L) и проц переходит к выполению следующего машинного цикла – останов.