

4.23. Кинематика станка-качалки
Кинематическая схема преобразующего механизма балансирного станка-качалки представляет собой четырехзвенник OBCD (рис. 4.35.).
Неподвижное звено - OD (расстояние от О до D), подвижные звенья - кривошип r, шатун l и заднее плечо балансира b.
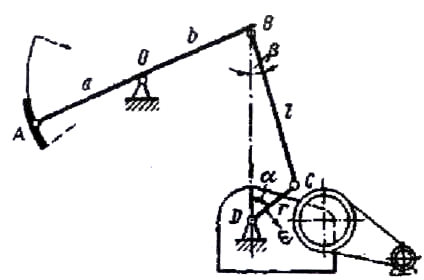
Рис. 4.35. Кинематическая схема балансирного станка-качалки
При вращении кривошипа точка С описывает окружность радиуса r, а точка В движется по дуге радиуса b.
Для упрощения определения закона движения точки В в расчетах делаются некоторые допущения, а именно:
-
точка В движется не по дуге, а по прямой;
-
принимают r/l=0; r/b=0, т. е. считается, что радиус кривошипа намного меньше длины балансира;
-угол β, образованный шатуном и линией, соединяющей центр кривошипа с точкой В, принимается равным нулю.
В этом случае закон движения точки В соответствует закону движения поршня насоса с кривошипно-шатунным механизмом.
При уточненных расчетах учитывается конечная длина шатуна, так как при значительной длине хода (4,5...6м) отношение радиуса кривошипа к длине шатуна r/l становится значительной величиной. Однако и в этом случае делается допущение, что траектория движения точки В прямолинейна.
При точных расчетах учитывается и кривизна траектории движения точки В, что позволяет уменьшить погрешность расчета.
Найдем закон движения точки подвеса штанг, т. е. определим путь, скорость и ускорение точки В.
Путь S, пройденный точкой В при повороте кривошипа на угол а (точка В займет новое положение B1), равен SB = B1B = BD-B1D, тогда BD будет равно r+l, а из треугольника BCD следует B1D = rcos a+lcos β, откуда:
SB = r +1 - r cosa -l cos β =r(1-cosa)+l(1-cos β)
С учетом допущения, что β = 0, получим:
SB =r(1-cosα) (4.15)
Скорость движения точки В будет равна:
v B=ωr sin a, (4.16)
а ускорение:
wB=ω 2rcosa. (4.17)
Путь, скорость и ускорение точки А определяются соотношением плеч балансира а и b:
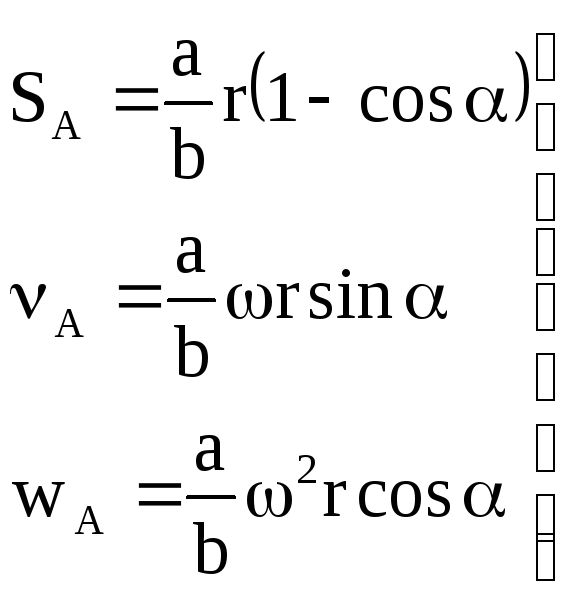 (4.18)
(4.18)
где ω- угловая скорость вращения кривошипа.
Графики изменения скорости и ускорения точки подвеса колонны штанг - это синусоида и косинусоида соответственно.
Более точно закономерность изменения перемещения, скорости и ускорения точки подвеса штанг может быть определена с помощью приближенного расчета.
Кинематическое совершенство станка-качалки характеризуется коэффициентом т, который определяется по формуле:
![]()
где wmax - максимальное ускорение точки подвеса штанг станка-качалки; w0 - ускорение при гармоничном движении.
Для определения показателя т удобно пользоваться следующей формулой:
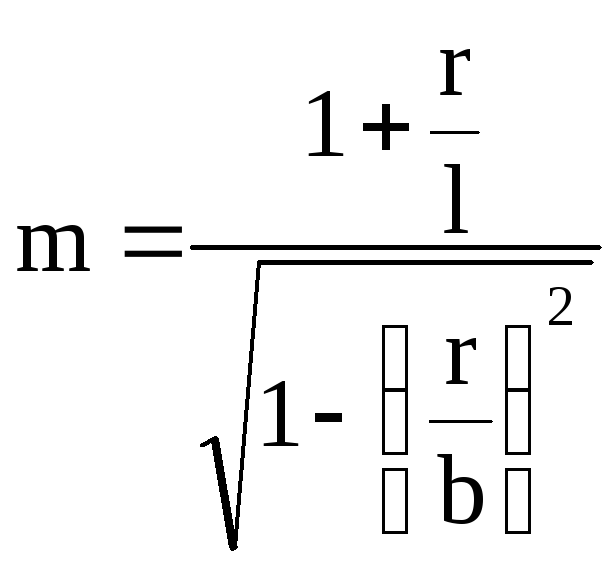 (4.19)
(4.19)
В зависимости от глубины подвески насоса допустимый коэффициент кинематического совершенства изменяется и для глубоких скважин должен быть не более 1,3.
4.24. Силы, действующие в точке подвеса штанг
Нагрузка в точке подвеса штанг балансирного станка-качалки обусловлена:
-
статическими нагрузками от силы тяжести жидкости и штанг, сил трения плунжера в цилиндре и штанг о трубы;
-
силами инерции движущихся масс, возникающими при движении с ускорением колонны штанг, и столба жидкости;
-
динамическими нагрузками, возникающими в результате вибрации штанг.
Практическое значение имеют суммарные минимальные и максимальные нагрузки на штанги, величина которых может быть определена либо непосредственно измерениями — динамометрированием, либо рассчитана.
Как уже было показано, максимальная величина статической нагрузки будет при ходе штанг вверх. С учетом сил инерции максимальная нагрузка в точке подвеса штанг будет определяться по формуле:
![]() (4.20)
(4.20)
Минимальная нагрузка определится по формуле:
![]() (4.21)
(4.21)
где Рж - вес жидкости, находящейся над плунжером скважинного насоса, Н;
Ршт - вес колонны штанг в воздухе, Н;
S - длина хода головки балансира станка-качалки, м;
п - число качаний в минуту головки балансира.
bр - коэффициент, учитывающий погружение штанг в жидкость.
![]()
где ρж - плотность жидкости, кг/м3;
ρшт, - плотность материала штанг, кг/м3.