

Структурний синтез автомата Мілі
Наприклад структурна таблиця переходів-виходів автомата Мілі (табл.31). У даній таблиці в стовпцях до (аm) і до (as) указується код початкового стану і стану переходу відповідно. У стовпці функцій збудження ФВ указуються ті значення функцій збудження, які на даному переході обов'язково рівні 1. Інші (тобто рівні 0 або що приймають невизначені значення) не указуються. Це еквівалентно тому, що всім невизначеним значенням функцій збудження приписується значення 0, що в загальному випадку не дає мінімальної функції, проте в реальних автоматах мінімізація звичайно не робиться з причини її неефективності.
Табл. 3.1. Структурна таблиця переходів-виходів автомата Мілі
|
аm |
K(am) |
as |
K (as) |
X |
Y |
ФВ |
|
a1 |
000 |
a2 a4 |
010 001 |
|
|
|
|
a2 |
010 |
a2 a5 a6 |
010 110 011 |
|
|
-
|
|
a3 |
101 |
a4 |
001 |
1 |
|
|
|
a4 |
001 |
a1 a3 |
000 101 |
|
|
|
|
a5 |
110 |
a1 |
000 |
1 |
|
|
|
a6 |
011 |
a1 a2 |
000 010 |
|
-
|
|
5.5. Запис та мінімізація ФВ збудження елементарних автоматів
Для отримання функцій збудження поступаємо таким чином. Вираз для кожної функції виходить у вигляді логічної суми творів виду а і Х, де а – початковий стан, Х – умова переходу.
Для спрощення одержаних виразів виконуємо всі можливі операції склеювання і поглинання:
![]()
![]()
![]()
![]()
![]()
![]()
Для отримання функцій виходів поступаємо аналогічно:
![]()
![]()
![]()
![]()
-
Побудова схеми керуючого автомата
Для побудови функціональної схеми автомата по одержаних виразах необхідно або замінити аі його значення через Q1 Q2 Q3 або одержати сигнал, відповідний аі. Звичайно використовують другий спосіб і для отримання сигналу аі застосовують так званий дешифратор станів, на вхід якого поступають сигнали з виходів елементів пам'яті Q1 Q2 Q3. Крім того, при побудові схеми прагнуть виділити загальні частини, що зустрічаються у функціях збудження або вихідних сигналах. В цьому випадку остаточна система рівнянь, по яких будується схема, матиме вигляд:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Функціональна схема автомата, побудована на підставі одержаних рівнянь, представлена на рис. 8.
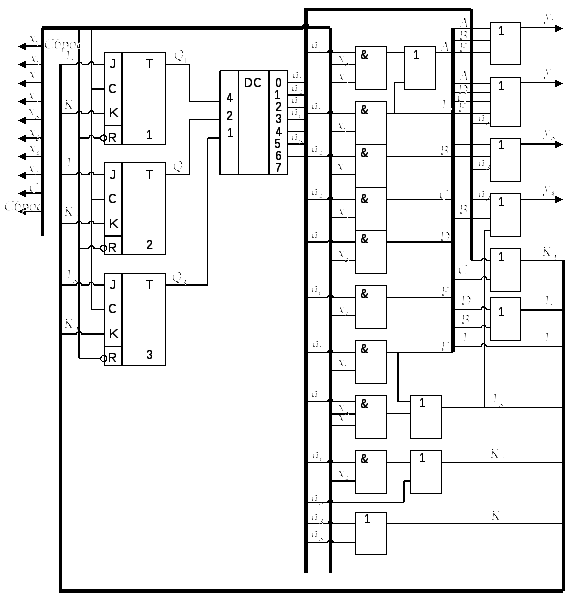
Рис. 8. Функціональна схема мікропрограмного автомата.